相关试卷
- 贵州省铜仁市2016-2017学年高一下学期物理期末考试试卷
- 贵州省铜仁市2016-2017学年高一上学期物理期末考试试卷
- 贵州省安顺市2016-2017学年高一上学期物理期末考试试卷
- 福建省三明市b区2016-2017学年高一上学期物理期末考试试卷
- 福建省泉州市泉港一中2016-2017学年高一上学期物理期末考试试卷
- 福建省莆田二十四中2016-2017学年高一上学期物理期末考试试卷
- 福建省龙岩市2017年高考物理一模试卷
- 福建省龙岩市四校联考2016-2017学年高二上学期物理期中考试试卷
- 福建省龙岩市四校联考2016-2017学年高一上学期物理期中考试试卷
- 海南省儋州市八一中学2016-2017学年高二上学期物理期末考试试卷
-
1、如图所示,水平地面上有一质量m=1kg的物块,物块与水平地面间的动摩擦因数μ=0.10,在与水平方向成θ=37°角斜向下的推力F作用下,由静止开始向右做匀加速直线运动。已知F=5N,sin37°=0.6,cos37°=0.8,重力加速度g取10m/s2 , 不计空气阻力。求:
 (1)、物块运动过程中所受滑动摩擦力的大小;(2)、物块运动过程中加速度的大小;(3)、物块开始运动2.0s所通过的位移大小。
(1)、物块运动过程中所受滑动摩擦力的大小;(2)、物块运动过程中加速度的大小;(3)、物块开始运动2.0s所通过的位移大小。 -
2、假设伽利略当年从比萨斜塔距地面高45m处静止释放小铁球,忽略空气阻力,g取 , 求:(1)、小铁球落到地面所用的时间;(2)、小铁球在下落过程中最后1s内的位移大小。
-
3、用如图甲所示的实验装置,探究加速度与力、质量的关系实验中,将一端带定滑轮的长木板放在水平实验桌面上,实验小车通过轻细绳跨过定滑轮与砂桶相连,小车与纸带相连,打点计时器所用交流电的频率为。

 (1)、在保持实验小车质量不变的情况下,放开砂桶,小车加速运动,处理纸带得到小车运动的加速度为a,改变砂桶中沙子的质量,多次重复实验。某次实验得到的纸带如图乙所示,可得木块运动加速度的大小为 , 纸带打P点时重物的瞬时速度大小为(计算结果均保留3位有效数字)。(2)、在验证“质量一定,加速度a与合外力F的关系”时,某同学根据实验数据作出了如图丙所示的图像,其中图线不过原点,产生这种现象的原因是________。
(1)、在保持实验小车质量不变的情况下,放开砂桶,小车加速运动,处理纸带得到小车运动的加速度为a,改变砂桶中沙子的质量,多次重复实验。某次实验得到的纸带如图乙所示,可得木块运动加速度的大小为 , 纸带打P点时重物的瞬时速度大小为(计算结果均保留3位有效数字)。(2)、在验证“质量一定,加速度a与合外力F的关系”时,某同学根据实验数据作出了如图丙所示的图像,其中图线不过原点,产生这种现象的原因是________。 (3)、丙图图线在F轴上的截距b的物理意义是________。
(3)、丙图图线在F轴上的截距b的物理意义是________。 -
4、如图甲是“验证力的平行四边形定则”实验。
 (1)、关于此实验的下列说法中正确的是( )A、同一次实验中,O点位置不允许变动 B、实验中,只需记录弹簧测力计的读数和O点的位置 C、实验中,把橡皮筋的另一端拉到O点时,两个弹簧测力计之间的夹角必须取90° D、两根细绳必须等长(2)、本实验所采用的是( )A、理想实验法 B、等效替代法 C、控制变量法 D、物理模型法(3)、做实验时,根据测量结果在白纸上画出如图乙所示的示意图,其中O为橡皮筋与细绳的结点,图中F1和F2的合力的理论值是 , 实际测量值是。(4)、图丙是某次实验记录的部分信息,其中合力F=10N,分力F2方向确定、与合力F夹角为θ=30°,则另一分力F1的最小值是________N。
(1)、关于此实验的下列说法中正确的是( )A、同一次实验中,O点位置不允许变动 B、实验中,只需记录弹簧测力计的读数和O点的位置 C、实验中,把橡皮筋的另一端拉到O点时,两个弹簧测力计之间的夹角必须取90° D、两根细绳必须等长(2)、本实验所采用的是( )A、理想实验法 B、等效替代法 C、控制变量法 D、物理模型法(3)、做实验时,根据测量结果在白纸上画出如图乙所示的示意图,其中O为橡皮筋与细绳的结点,图中F1和F2的合力的理论值是 , 实际测量值是。(4)、图丙是某次实验记录的部分信息,其中合力F=10N,分力F2方向确定、与合力F夹角为θ=30°,则另一分力F1的最小值是________N。 -
5、如图所示,斜面体A静止在水平面上,滑块B沿斜面向下做匀速运动过程中,给B施加一竖直向下恒力作用(图中未画出),斜面体仍保持静止,则( )
 A、滑块B做匀加速直线运动 B、滑块B做匀速直线运动 C、斜面体A不受地面的摩擦力 D、斜面体A受地面的摩擦力
A、滑块B做匀加速直线运动 B、滑块B做匀速直线运动 C、斜面体A不受地面的摩擦力 D、斜面体A受地面的摩擦力 -
6、某同学站在电梯的水平地板上,利用速度传感器研究电梯的升降过程。取竖直向上为正方向,电梯在某一段时间内速度的变化情况如图所示。根据图像提供的信息,下列说法正确的是( )
 A、在0~5s内,电梯加速上升,该同学处于超重状态 B、在5s~10s内,该同学对电梯地板的压力大于其重力 C、在10s~20s内,电梯减速上升,该同学处于超重状态 D、在20s~25s内,电梯加速下降,该同学处于失重状态
A、在0~5s内,电梯加速上升,该同学处于超重状态 B、在5s~10s内,该同学对电梯地板的压力大于其重力 C、在10s~20s内,电梯减速上升,该同学处于超重状态 D、在20s~25s内,电梯加速下降,该同学处于失重状态 -
7、关于摩擦力的说法,正确的是( )A、摩擦力的大小跟同一接触面上压力的大小成正比 B、静止的物体可能受滑动摩擦力 C、摩擦力方向一定与物体运动方向相反 D、摩擦力不一定总是阻碍物体的运动
-
8、如图所示,物体A靠在竖直墙面上,在竖直向上的力F作用下,A、B共同向上匀速运动,下列关于A、B的受力个数正确的是( )
 A、3,4 B、5,4 C、4,4 D、3,5
A、3,4 B、5,4 C、4,4 D、3,5 -
9、如图所示,起重机将重为G的均质正方形薄板匀速吊起,四条钢索等长且每条钢索与竖直方向的夹角均为 , 则每条钢索中弹力的大小为( )
 A、 B、 C、 D、
A、 B、 C、 D、 -
10、某物体在时间内运动的位置时间图像(图)如图甲所示,速度时间图像(图)如图乙所示,则( )
 A、由图甲可知时间内该物体做曲线运动 B、时间内该物体加速度逐渐减小 C、物体在时间内的位移为 D、物体在时间内的位移为
A、由图甲可知时间内该物体做曲线运动 B、时间内该物体加速度逐渐减小 C、物体在时间内的位移为 D、物体在时间内的位移为 -
11、以一定的初速度v0=20m/s从地面竖直向上抛出一个小球,空气的阻力不计,g取10m/s2 , 则( )A、小球上升到最高点时,加速度为零 B、小球在第一秒末和第三秒末速度相同 C、小球在上升阶段与下降阶段的加速度相同 D、小球上升阶段的时间大于下降阶段的时间
-
12、在实验室中可以看到如图所示的实验现象:当用手按压桌面时,反射在天花板上的光点会发生移动。则下列说法正确的是( )
 A、桌面受到向下的弹力,是由于桌面发生了形变 B、反射在天花板上的光点发生移动,说明桌面发生了形变 C、手受到向上的弹力,是由于手发生了形变 D、手对桌面的压力与桌面对手的支持力是一对平衡力
A、桌面受到向下的弹力,是由于桌面发生了形变 B、反射在天花板上的光点发生移动,说明桌面发生了形变 C、手受到向上的弹力,是由于手发生了形变 D、手对桌面的压力与桌面对手的支持力是一对平衡力 -
13、下列说法中正确的是( )A、质点是理想化模型,现实并不存在,所以引入它没有多大意义 B、伽利略通过实验说明了力是维持物体运动状态的原因 C、牛顿第一定律是在已有实验基础上进行合理外推而来的,属于理想实验,是不能直接用实验来验证的 D、牛顿的理想斜面实验开创了实验研究和逻辑推理相结合的探索自然规律的科学方法
-
14、物理学的发展丰富了人类对物质世界的认识,推动了科学技术的创新和革命,促进了物质生产的繁荣与人类文明的进步。下列表述正确的是( )A、开普勒通过分析第谷的观测数据,得出了行星运动的规律 B、牛顿发现了万有引力定律,并通过实验较准确地测出了引力常量 C、英国物理学家卡文迪什利用扭秤实验首先较准确地测定了静电力常量 D、库仑利用扭秤实验发现了库仑定律,并测定了电子的电荷量
-
15、如图甲所示,真空中的电极能连续不断均匀地放出初速度为零、质量为、电荷量为的粒子,经加速电场加速,由小孔穿出,沿两个彼此绝缘且靠近的水平金属板A、B间的中线平行于极板射入偏转电场,A、B两板距离为 , A、B板长为 , AB两板间加周期为的变化电场,如图乙所示,已知 , 能从偏转电场板间飞出的粒子在偏转电场中运动的时间也为。忽略极板边缘处电场的影响,不计粒子的重力以及粒子之间的相互作用,粒子打到极板上后即消失.求:
 (1)、加速电场中的;(2)、若时刻粒子进入偏转电场两极板之间,粒子能否飞出极板?如果能,那么粒子的偏移量是多少?如果不能,那么粒子在偏转电场里平行于极板方向的位移是多少?(3)、若发射时间足够长,则能够从两极板间飞出的粒子占总入射粒子数的百分率。
(1)、加速电场中的;(2)、若时刻粒子进入偏转电场两极板之间,粒子能否飞出极板?如果能,那么粒子的偏移量是多少?如果不能,那么粒子在偏转电场里平行于极板方向的位移是多少?(3)、若发射时间足够长,则能够从两极板间飞出的粒子占总入射粒子数的百分率。 -
16、冰壶运动是冰上进行的一种投掷性竞赛项目,它考验参与者的体能与脑力,展现动静之美,取舍之智慧,已列入冬奥会比赛项目.在一次冰壶运动训练中,如图所示,使用的红冰壶和黄冰壶的质量都是 , 开始时黄冰壶静止在冰面上,红冰壶以一定速度向前运动并和黄冰壶发生对心正碰,碰撞时间极短,碰撞后红冰壶速度为 , 黄冰壶速度为 . 它们与冰面的动摩擦因数均为0.05,重力加速度取 . 求:
 (1)、红冰壶碰撞前瞬间的速度大小;(2)、两冰壶在碰撞过程中损失的机械能;(3)、若碰撞之后两冰壶一直匀减速到0,那么最终两冰壶之间的距离.
(1)、红冰壶碰撞前瞬间的速度大小;(2)、两冰壶在碰撞过程中损失的机械能;(3)、若碰撞之后两冰壶一直匀减速到0,那么最终两冰壶之间的距离. -
17、如图所示,一对间距、竖直放置的平行金属板、分别接于电路中电阻箱的两端,平行金属板间产生的电场可视为匀强电场。现将一质量为、带电量绝对值为的带电小球,用质量不计的绝缘细线悬挂于电场中某点。闭合 , 电阻箱的阻值调到 , 小球静止时悬线与竖直方向的夹角。电源电动势 , 内阻 , 取 , 。求:
 (1)、判断小球的电性,并简要说明判断依据;(2)、平行金属板、间的电压;(3)、此时电源的总功率和小灯泡的功率。
(1)、判断小球的电性,并简要说明判断依据;(2)、平行金属板、间的电压;(3)、此时电源的总功率和小灯泡的功率。 -
18、某实验小组要探究一热敏电阻的阻值随温度变化的规律,设计了如下实验.
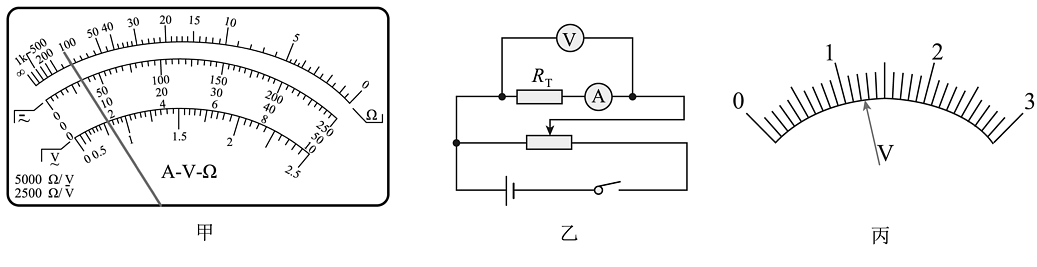 (1)、测热敏电阻在某一温度下的阻值.保持热敏电阻温度为 , 用多用电表的欧姆挡“”倍率测量热敏电阻的阻值,正确操作指针偏转如图甲所示.实验小组应将倍率更换至________(选填“”或“”)倍率,正确操作并读出热敏电阻的阻值。(2)、用多用电表粗略测热敏电阻阻值后,为了准确测量热敏电阻在温度下的阻值.设计了如图乙所示测量电路图.电流表示数为 , 电压表量程为 , 表盘如图丙所示,示数为V,此时热敏电阻的测量值为(保留3位有效数字);(3)、经测量热敏电阻与温度的关系部分数据如下表所示:
(1)、测热敏电阻在某一温度下的阻值.保持热敏电阻温度为 , 用多用电表的欧姆挡“”倍率测量热敏电阻的阻值,正确操作指针偏转如图甲所示.实验小组应将倍率更换至________(选填“”或“”)倍率,正确操作并读出热敏电阻的阻值。(2)、用多用电表粗略测热敏电阻阻值后,为了准确测量热敏电阻在温度下的阻值.设计了如图乙所示测量电路图.电流表示数为 , 电压表量程为 , 表盘如图丙所示,示数为V,此时热敏电阻的测量值为(保留3位有效数字);(3)、经测量热敏电阻与温度的关系部分数据如下表所示:10.0
20.0
30.0
40.0
50.0
60.0
2400.0
1500.0
1150.0
860.0
435.0
120.0
实验小组利用该热敏电阻制作温控报警器,其电路原理如图所示,恒压电源两端的电压为 , 报警系统接在之间,当之间的输出电压低于时,便触发报警器报警,若要求开始报警时环境温度为60℃,则图中电阻箱的阻值应为 . 测试发现温度达到58℃时报警器就开始报警,则应(选填“调小”或“调大”)电阻箱的阻值.

-
19、在第四次“天宫课堂”中,航天员演示了动量守恒实验.受此启发,某同学用如图甲所示的装置“验证动量守恒定律”,部分实验步骤如下:
 (1)、用螺旋测微器测P、Q上固定的遮光条宽度分别为和 . 测示数如图乙所示,其读数为________;(2)、在调节气垫导轨水平时,开启充气泵,将其中一个滑块轻放在导轨中部后,发现它向右加速运动。此时,可以调节左支点使其高度________(选填“升高”或“降低”),直至滑块能静止在导轨上。(3)、用天平测得、的质量(含遮光条)分别为和。实验时,将两个滑块压缩轻弹簧后用细线栓紧,然后烧断细线,轻弹簧将两个滑块弹开,测得它们通过光电门的时间分别为、。则动量守恒应满足的关系式为________(用、、、、、表示)。
(1)、用螺旋测微器测P、Q上固定的遮光条宽度分别为和 . 测示数如图乙所示,其读数为________;(2)、在调节气垫导轨水平时,开启充气泵,将其中一个滑块轻放在导轨中部后,发现它向右加速运动。此时,可以调节左支点使其高度________(选填“升高”或“降低”),直至滑块能静止在导轨上。(3)、用天平测得、的质量(含遮光条)分别为和。实验时,将两个滑块压缩轻弹簧后用细线栓紧,然后烧断细线,轻弹簧将两个滑块弹开,测得它们通过光电门的时间分别为、。则动量守恒应满足的关系式为________(用、、、、、表示)。 -
20、某同学为了研究水波的传播特点,在水面上放有稳定波源,如图甲所示,为波源位置产生的水波沿水平方向传播(视为简谐波),由该时刻开始计时,在波源的右侧某位置放有浮标,内有速度传感器,图像如图乙所示,向上为正方向,则( )
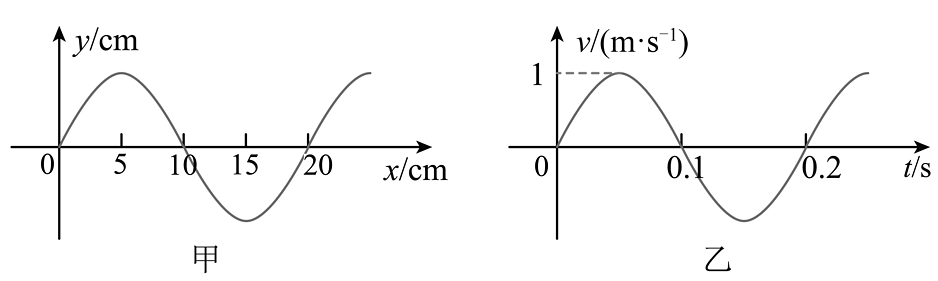 A、浮标的振动的频率为 B、水波的传播速度大小为 C、浮标的振动方程为 D、浮标放置的位置可能为
A、浮标的振动的频率为 B、水波的传播速度大小为 C、浮标的振动方程为 D、浮标放置的位置可能为