相关试卷
- 四川省自贡市2017年高考物理三诊试卷
- 四川省绵阳市三台中学2017-2018学年高二上学期物理开学考试试卷
- 四川省遂宁市2016-2017学年高一上学期物理期末考试试卷
- 四川省南充中学2016-2017学年高一上学期物理期末考试试卷
- 四川省广安市邻水县2016-2017学年高一上学期物理期末考试试卷
- 四川省成都市武侯区2016-2017学年高一上学期物理期末考试试卷
- 四川省南充市2017年高考物理一诊试卷
- 辽宁省锦州市2017年高考物理二模试卷
- 辽宁省大连市金州区得胜高中2016-2017学年高二下学期物理期末考试试卷(选修3-4、选修3-5)
- 辽宁省六校协作体2016-2017学年高一上学期物理期中考试试卷
-
1、为了节能和环保,一些公共场所用光敏电阻制作光控开关来控制照明系统,光敏电阻的阻值随着光的强弱而变化。物理学中用照度(E)描述光的强弱,光越强照度越大,照度的单位为勒克斯(lx)。某实验小组根据光敏电阻在不同照度下的阻值,绘制图像如图甲所示。
 (1)、由图甲可知,随着照度的减小,光敏电阻的阻值不断(选填“增大”或“减小”);同一规格的光敏电阻传感器,当照度不同时,其灵敏度存在着较大的差异,要使光敏电阻传感器比较灵敏,就应使之工作在灵敏度较大的区间。本实验中,在照度(选填“小于的区间”或“大于以后”)其灵敏度较大;(2)、如图乙所示,要求当照度低至时光敏电阻两端的电压恰好能使放大电路中的电磁铁吸引照明电路中开关K的衔铁实现启动照明系统,此时两端的电压叫做放大电路的激励电压,已知直流电源电动势为6V,内阻不计,放大电路的激励电压为3V,为实现照度低至时电磁开关启动照明电路,电阻箱R的阻值为________kΩ(结果保留2位有效数字)。
(1)、由图甲可知,随着照度的减小,光敏电阻的阻值不断(选填“增大”或“减小”);同一规格的光敏电阻传感器,当照度不同时,其灵敏度存在着较大的差异,要使光敏电阻传感器比较灵敏,就应使之工作在灵敏度较大的区间。本实验中,在照度(选填“小于的区间”或“大于以后”)其灵敏度较大;(2)、如图乙所示,要求当照度低至时光敏电阻两端的电压恰好能使放大电路中的电磁铁吸引照明电路中开关K的衔铁实现启动照明系统,此时两端的电压叫做放大电路的激励电压,已知直流电源电动势为6V,内阻不计,放大电路的激励电压为3V,为实现照度低至时电磁开关启动照明电路,电阻箱R的阻值为________kΩ(结果保留2位有效数字)。 -
2、某实验小组在“用油膜法估测油酸分子的大小”实验中,若把油酸分子简化为球形处理,体现的科学思维方法为(选填“控制变量法”、“等效替代法”或“理想模型法”),若实验室中使用的油酸酒精溶液的浓度为c,测得N滴这种油酸酒精溶液的总体积为V,将一滴这种溶液滴在浅盘中的水面上,在有边长为a的正方形小格的玻璃板上描出油膜的轮廓如图所示,油膜面积为 , 油酸分子的直径为。

-
3、如图,理想变压器原、副线圈匝数比为 , 原线圈中接有定值电阻 , 副线圈接有定值电阻和滑动变阻器R,已知 , 两端接一正弦式交流电,当滑动变阻器的滑片向左滑动过程中,则( )
 A、电流表A示数变小 B、电压表V示数不变 C、变压器的输出功率先增大后减小 D、电压表示数变化与电流表示数变化的比值不变
A、电流表A示数变小 B、电压表V示数不变 C、变压器的输出功率先增大后减小 D、电压表示数变化与电流表示数变化的比值不变 -
4、如图所示为测量储罐中不导电液体高度的电路,与储罐外壳绝缘的两块平行金属板构成的电容器C置于储罐中,电容器C可通过开关S与电感L或电源相连.当开关从a拨到b时,由电感L与电容器C构成的回路中产生振荡电流,某时刻电路中的电流方向如图所示,电容器C右极板带负电,则( )
 A、该时刻电容器正充电 B、该时刻电流正在增大 C、该时刻磁场能正转化为电场能 D、当罐中液面下降时,振荡电流的频率增大
A、该时刻电容器正充电 B、该时刻电流正在增大 C、该时刻磁场能正转化为电场能 D、当罐中液面下降时,振荡电流的频率增大 -
5、图甲是一定质量的理想气体在不同温度下的气体分子速率分布曲线;图乙是显微镜下花粉微粒每30s的位置连线;图丙是分子力与分子间距离关系曲线:图丁是固体熔化过程曲线,则( )
 A、由甲图像可知,气体在①状态下的温度高于②状态下的温度 B、由乙图像可知,花粉微粒的无规则运动反映了花粉微粒分子的无规则运动 C、由丙图像可知,随分子间距离增大,分子力可能先减小,再增大,再减小为零 D、由丁图像可知,固体A可能表现各向同性,固体B可能表现各向异性
A、由甲图像可知,气体在①状态下的温度高于②状态下的温度 B、由乙图像可知,花粉微粒的无规则运动反映了花粉微粒分子的无规则运动 C、由丙图像可知,随分子间距离增大,分子力可能先减小,再增大,再减小为零 D、由丁图像可知,固体A可能表现各向同性,固体B可能表现各向异性 -
6、图甲为交流发电机的示意图,磁场可视为水平方向的匀强磁场,磁感应强度大小B=2T,匝数N=100,面积为S=10cm2 , 电阻为r=2Ω的矩形线圈绕垂直于磁场的水平轴OO'沿逆时针方向以转速n=10r/s匀速转动,线圈通过电刷与R=8Ω的定值电阻相连,电流表为理想交流电流表,则( )
 A、电流方向每秒改变10次 B、电流表的示数约为0.89A C、图示位置线圈ABCD上的电流方向为 D、线圈转速加倍,线圈转一周,电阻R产生的焦耳热变为原来的4倍
A、电流方向每秒改变10次 B、电流表的示数约为0.89A C、图示位置线圈ABCD上的电流方向为 D、线圈转速加倍,线圈转一周,电阻R产生的焦耳热变为原来的4倍 -
7、气闸舱是载人航天器中供航天员进入太空或由太空返回时所使用的气密性装置,其原理图如图所示,座舱A与气闸舱B之间装有阀门K,座舱A中充满空气,气闸舱B内为真空.航天员从太空返回气闸舱时,打开阀门K,A中的气体进入B中,最终达到平衡.假设此过程中系统与外界没有热交换,舱内气体可视为理想气体,则( )
 A、气体体积膨胀,对外做功,内能减小 B、B中气体可自发地全部退回到A中 C、在自由膨胀过程中,所有气体分子的运动方向相同 D、气体分子单位时间内与A舱壁单位面积上的碰撞次数将减少
A、气体体积膨胀,对外做功,内能减小 B、B中气体可自发地全部退回到A中 C、在自由膨胀过程中,所有气体分子的运动方向相同 D、气体分子单位时间内与A舱壁单位面积上的碰撞次数将减少 -
8、如图所示,足够长的光滑平行金属导轨固定于水平绝缘平台上,两完全相同的导体棒、均垂直于导轨静止放置,整个装置处于垂直于导轨平面向上的匀强磁场中.现使导体棒以某一初速度向右运动,两棒始终与导轨接触良好,导轨电阻不计,则从开始运动到稳定过程中,则( )
 A、导体棒所受安培力做的功等于整个回路产生的焦耳热 B、导体棒克服安培力做的功等于整个回路产生的焦耳热 C、导体棒克服安培力做的功小于导体棒动能的减少量 D、导体棒克服安培力做的功等于整个回路产生的焦耳热与导体棒的动能增加量之和
A、导体棒所受安培力做的功等于整个回路产生的焦耳热 B、导体棒克服安培力做的功等于整个回路产生的焦耳热 C、导体棒克服安培力做的功小于导体棒动能的减少量 D、导体棒克服安培力做的功等于整个回路产生的焦耳热与导体棒的动能增加量之和 -
9、如图所示的电路中,是一个自感系数很大、直流电阻不计的线圈,D2灯泡的电阻是D1灯泡电阻的2倍且阻值均不变,是内阻不计的电源,在时刻,闭合开关 , 电路稳定后在时刻断开开关 , 规定以电路稳定时流过D1、D2的电流方向为正,分别用、表示流过D1和D2的电流,则下图中能定性描述电流随时间变化关系的是( )
 A、
A、 B、
B、 C、
C、 D、
D、
-
10、如图所示,竖直平面内存在水平向右的匀强电场和垂直于纸面向里的匀强磁场,一质量为m、电荷量为q的油滴以速度v与磁场方向垂直射入复合场中,恰能沿与竖直方向成θ角的直线由N运动到M,重力加速度为g,则( )
 A、 , B、 , C、 , D、 ,
A、 , B、 , C、 , D、 , -
11、水能浸润玻璃,将两端开口的玻璃细管插入盛有水的开口玻璃容器中,细管内外液面稳定后,能看到的现象是( )A、
 B、
B、 C、
C、 D、
D、
-
12、关于电磁场与电磁波,下列说法正确的是( )A、变化的电场可能在周围空间产生变化的磁场 B、电磁波和机械波的传播速度都只与介质有关 C、使载波随各种信号而改变的技术叫解调 D、医院利用红外线杀菌消毒和利用紫外线加热理疗
-
13、如图所示,水平面内有两条相互垂直且彼此绝缘的通电长直导线,以它们为坐标轴构成一个平面直角坐标系.四个相同的圆形闭合线圈在四个象限内完全对称放置,两直导线中的电流大小与变化情况完全相同,电流方向如图所示,当两直导线中的电流都增大时,四个线圈a、b、c、d中感应电流的情况是( )
 A、线圈a中无感应电流 B、线圈b中有感应电流 C、线圈c中有感应电流 D、线圈d中无感应电流
A、线圈a中无感应电流 B、线圈b中有感应电流 C、线圈c中有感应电流 D、线圈d中无感应电流 -
14、下列说法正确的是( )A、耳朵能够听到声波,是因为耳朵和声源之间有空气 B、水波的传播需要水,没有水就没有水波 C、电磁波传播需要空气,没有空气,即使产生了电磁波也传不出来 D、电磁波的传播速率等于光速,不受其他因素影响
-
15、磁场中某区域的磁感线如图所示,a、b、c、d、e是磁场中的5个点,其中c、d两点关于直线对称,下面说法正确的是( )
 A、这5个位置中,e点的磁感应强度最大 B、a点没有磁感线穿过,所以a点磁感应强度一定为零 C、c、d两点关于直线对称,所以c、d两点磁感应强度方向相同 D、b、e两点在同一直线上,所以b、e两点磁感应强度方向相同
A、这5个位置中,e点的磁感应强度最大 B、a点没有磁感线穿过,所以a点磁感应强度一定为零 C、c、d两点关于直线对称,所以c、d两点磁感应强度方向相同 D、b、e两点在同一直线上,所以b、e两点磁感应强度方向相同 -
16、如图所示是某电源的路端电压与电流的关系图像,下列结论正确的是( )
 A、电源的电动势为6.0V B、电源的内阻为12Ω C、当外电阻为12Ω时,电源的输出功率最大 D、电流为0.4A时的外电阻是13Ω
A、电源的电动势为6.0V B、电源的内阻为12Ω C、当外电阻为12Ω时,电源的输出功率最大 D、电流为0.4A时的外电阻是13Ω -
17、如图所示,所带电荷量分别为4q和-q(q>0)的小球A、B固定在水平放置的光滑绝缘细杆上,相距为d,若在杆上再套一带电小环C而处于平衡,已知带电体A、B和C均可视为点电荷,则下列说法正确的是( )
 A、小环C一定位于A、B间距小球A处 B、小环C一定位于小球B右侧d处 C、小环C一定带正电且电荷量一定满足q≤Q≤4q D、若将小环C拉离平衡位置一微小位移后由静止释放,则小环C可能会回到平衡位置
A、小环C一定位于A、B间距小球A处 B、小环C一定位于小球B右侧d处 C、小环C一定带正电且电荷量一定满足q≤Q≤4q D、若将小环C拉离平衡位置一微小位移后由静止释放,则小环C可能会回到平衡位置 -
18、如图所示,水平放置的充电平行金属板相距为d,其间形成匀强电场,一带正电的小油滴从下极板边缘射入,并沿直线从上极板边缘射出,油滴质量为m,带电量为q,则( )
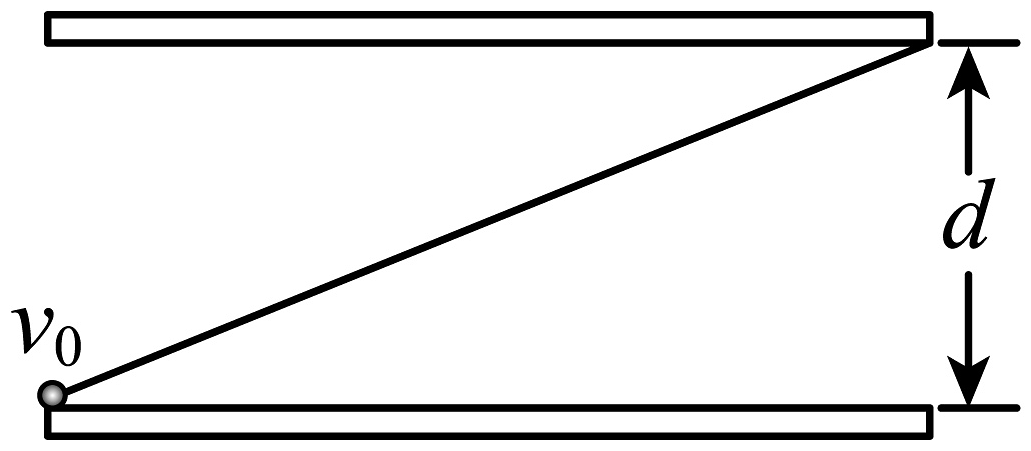 A、场强方向竖直向上 B、场强方向竖直向下 C、两极板间的电势差为 D、油滴的电势能增加了mgd
A、场强方向竖直向上 B、场强方向竖直向下 C、两极板间的电势差为 D、油滴的电势能增加了mgd -
19、如图所示,已知电源电动势E=2 V,电源内阻r=0.5 Ω,小灯泡电阻R0=2 Ω,滑动变阻器R最大阻值为10 Ω.当开关闭合后,调节滑动变阻器,设灯泡电阻不随温度变化而变化,则( )
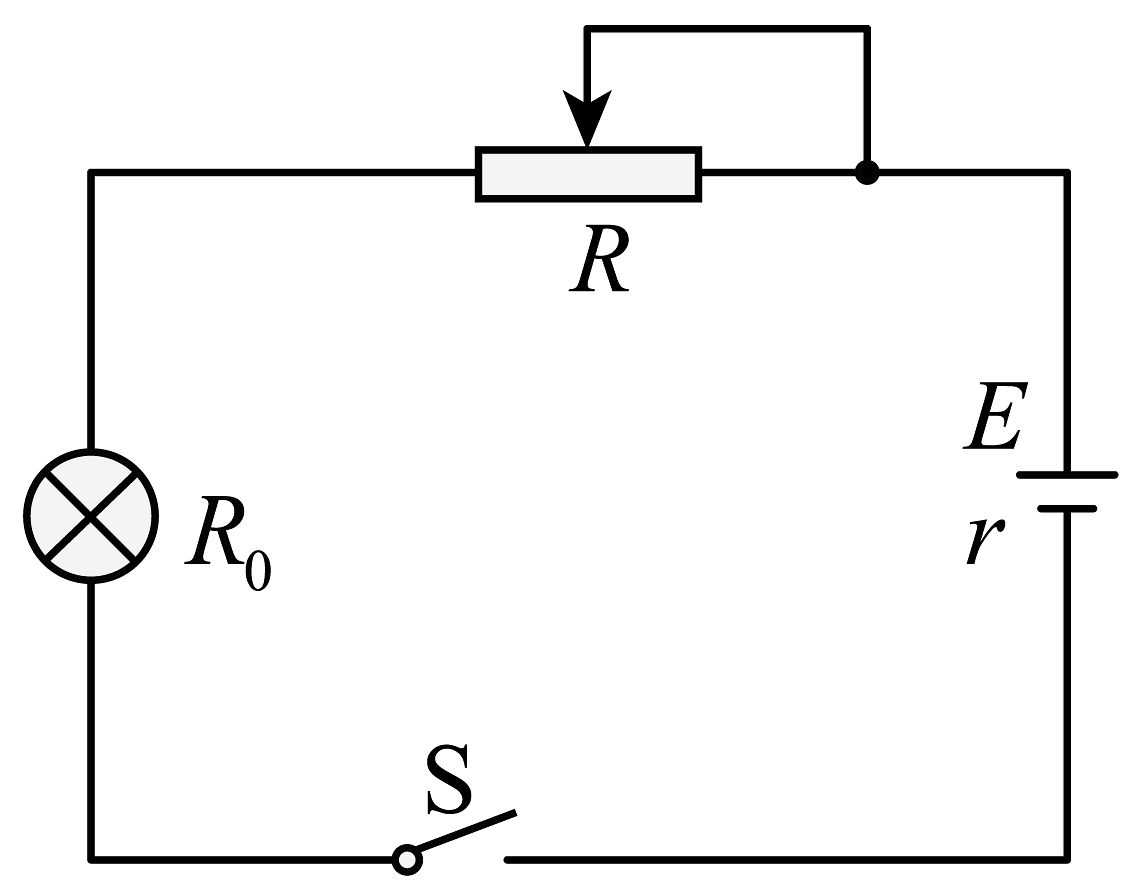 A、当滑动变阻器阻值调至0.5 Ω时,电源输出功率最大 B、当滑动变阻器阻值调至1.5 Ω时,灯泡最亮 C、当滑动变阻器阻值逐渐减小时,电源输出功率逐渐增大 D、当滑动变阻器阻值调至2.5 Ω时,滑动变阻器的电功率最大
A、当滑动变阻器阻值调至0.5 Ω时,电源输出功率最大 B、当滑动变阻器阻值调至1.5 Ω时,灯泡最亮 C、当滑动变阻器阻值逐渐减小时,电源输出功率逐渐增大 D、当滑动变阻器阻值调至2.5 Ω时,滑动变阻器的电功率最大 -
20、假设某同学研究白炽灯得到某白炽灯的伏安特性曲线如图所示。图像上A点与原点连线与横轴成α角,曲线在A点的切线与横轴成β角,则( )
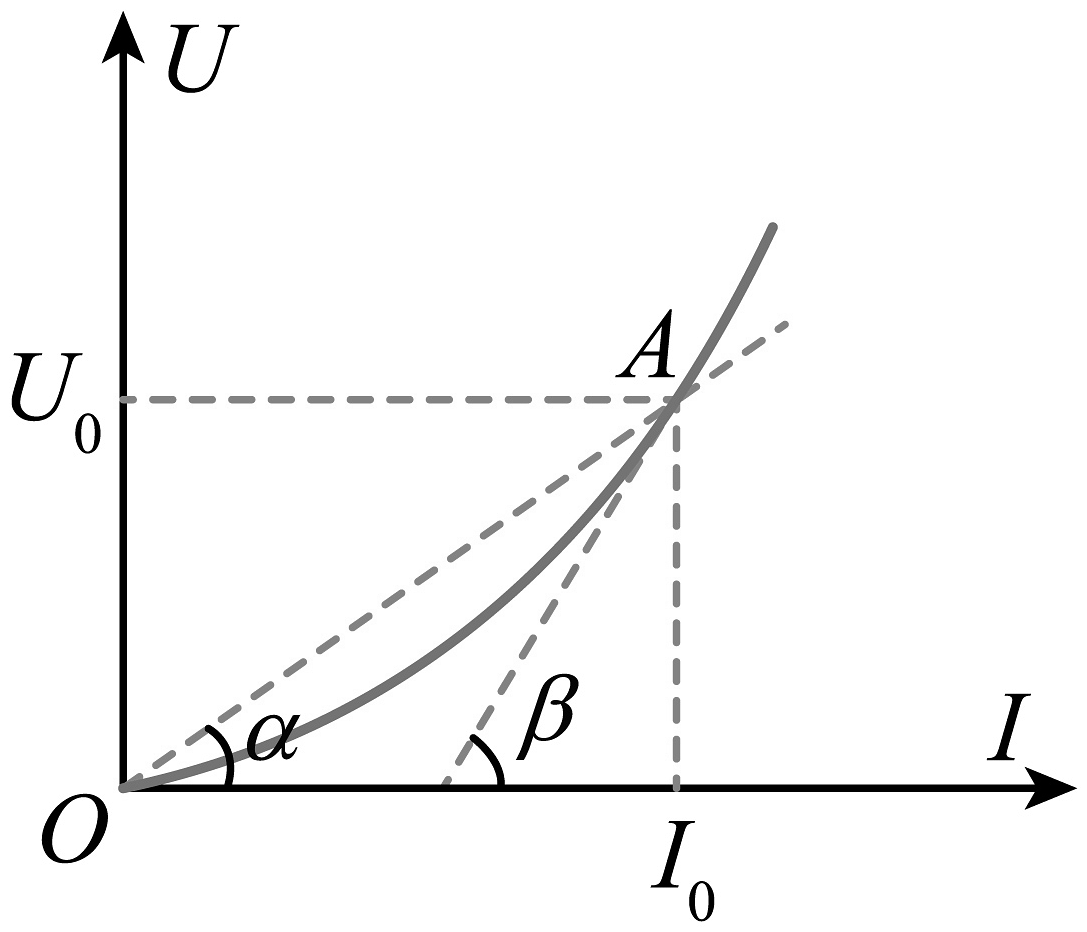 A、白炽灯的电阻随电压的增大而减小 B、在A点,白炽灯的电阻可表示为tanβ C、在A点,白炽灯的电功率可表示为U0I0 D、在A点,白炽灯的电阻可表示
A、白炽灯的电阻随电压的增大而减小 B、在A点,白炽灯的电阻可表示为tanβ C、在A点,白炽灯的电功率可表示为U0I0 D、在A点,白炽灯的电阻可表示