-
1、利用如图(a)所示装置验证机械能守恒定律。
 (1)、除带夹子的重物、纸带、铁架台(含铁夹)、打点计时器、导线及开关外,在下列器材中,还必须使用的器材有______。A、交流电源 B、刻度尺 C、天平(含砝码)(2)、实验中,先接通电源,再释放重物,得到图(b)所示的一条纸带。在纸带上选取三个连续打出的点A、B、C,测得它们到起始点O的距离分别为、、已知重力加速度为g,打点计时器打点周期为T。选取O到B的过程进行机械能守恒定律的验证,则需要验证的关系式为 (用图中已给物理量符号表示)。
(1)、除带夹子的重物、纸带、铁架台(含铁夹)、打点计时器、导线及开关外,在下列器材中,还必须使用的器材有______。A、交流电源 B、刻度尺 C、天平(含砝码)(2)、实验中,先接通电源,再释放重物,得到图(b)所示的一条纸带。在纸带上选取三个连续打出的点A、B、C,测得它们到起始点O的距离分别为、、已知重力加速度为g,打点计时器打点周期为T。选取O到B的过程进行机械能守恒定律的验证,则需要验证的关系式为 (用图中已给物理量符号表示)。 (3)、大多数学生的实验结果显示,重力势能的减少量大于动能的增加量,原因是______。A、利用公式v=gt计算重物速度 B、利用公式计算重物速度 C、存在空气阻力和摩擦阻力 D、没有采用多次实验取平均值的方法
(3)、大多数学生的实验结果显示,重力势能的减少量大于动能的增加量,原因是______。A、利用公式v=gt计算重物速度 B、利用公式计算重物速度 C、存在空气阻力和摩擦阻力 D、没有采用多次实验取平均值的方法 -
2、从地面竖直向上抛出一物体,其机械能等于动能与重力势能之和。取地面为重力势能零点,该物体的和随它离开地面的高度的变化如图所示。重力加速度。由图中数据可得( )
 A、物体的质量为 B、时,物体的速率为 C、时,物体的动能 D、从地面至 , 物体的动能减少
A、物体的质量为 B、时,物体的速率为 C、时,物体的动能 D、从地面至 , 物体的动能减少 -
3、2020年12月17日,“嫦娥五号”首次地外天体采样返回任务圆满完成。在采样返回过程中,“嫦娥五号”要面对取样、上升、对接和高速再入等四个主要技术难题,要进行多次变轨飞行。图为“嫦娥五号”绕月球飞行的三条轨道示意图,轨道1是贴近月球表面的圆形轨道,轨道2和轨道3是变轨后的椭圆轨道,并且都与轨道1相切于A点。A点是轨道2的近月点,B点是轨道2的远月点。不计变轨中“嫦娥五号”质量的变化,不考虑其它天体的影响,下列说法中正确的是( )
 A、“嫦娥五号”在轨道2上运行过程中,经过A点时的加速度大于经过B点时的加速度 B、“嫦娥五号”从轨道1进入轨道2需要在A点火加速 C、“嫦娥五号”在轨道2上运行过程中,经过A点时的机械能大于经过B点时的机械能 D、“嫦娥五号”在轨道3上运行过程中所受到的万有引力始终不做功
A、“嫦娥五号”在轨道2上运行过程中,经过A点时的加速度大于经过B点时的加速度 B、“嫦娥五号”从轨道1进入轨道2需要在A点火加速 C、“嫦娥五号”在轨道2上运行过程中,经过A点时的机械能大于经过B点时的机械能 D、“嫦娥五号”在轨道3上运行过程中所受到的万有引力始终不做功 -
4、质量为m、速度为v的A球与质量为3m的静止B球发生正碰.碰撞可能是弹性的,也可能是非弹性的,因此,碰撞后B球的速度可能有不同的值.碰撞后B球的速度大小可能是A、v B、0.6v C、0.3v D、0.2v
-
5、“独竹漂”是一项独特的黔北民间绝技。独竹漂高手们脚踩一根楠竹,漂行水上如履平地。如图甲所示,在平静的湖面上,一位女子脚踩竹竿抵达岸边,此时女子静立于竹竿A点,一位摄影爱好者使用连拍模式拍下了该女子在竹竿上行走过程的系列照片,并从中选取了两张进行对比,其简化图如下。经过测量发现,甲、乙两张照片中A、B两点的水平间距约为1cm,乙图中竹竿右端距离河岸约为1.8cm。女子在照片上身高约为1.6cm。已知竹竿的质量约为25kg,若不计水的阻力,则该女子的质量约为( )
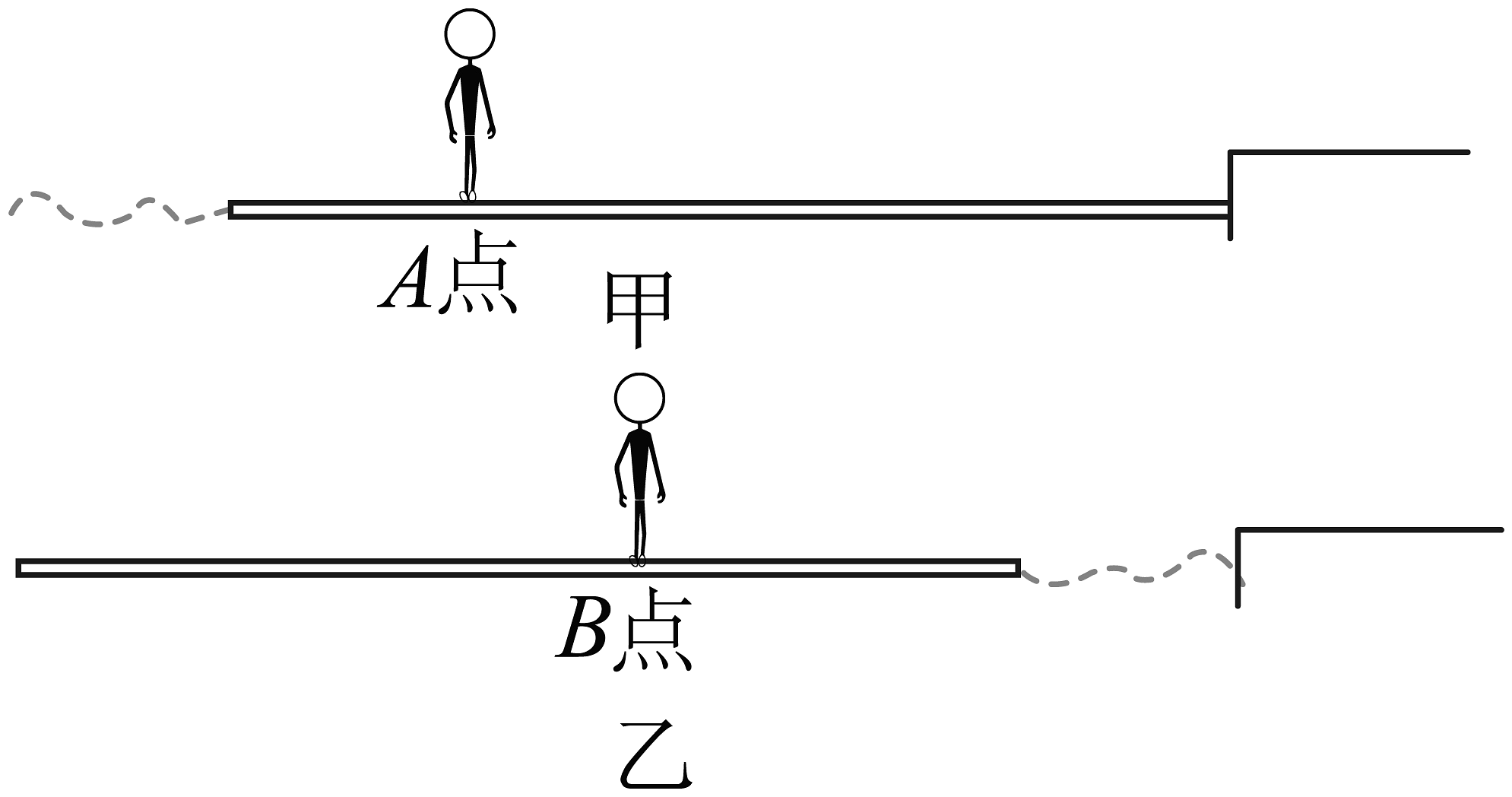 A、45kg B、50kg C、55kg D、60kg
A、45kg B、50kg C、55kg D、60kg -
6、如图所示,质量m的小球,从离桌面H高处A点由静止自由下落,桌面离地面的高度h,若以桌面为参考平面,重力加速度为g,下列说法正确的是( )
 A、小球在A点的重力势能为 B、小球在桌面高度处的动能为mgH C、由A到B的下落过程中小球机械能减少了 D、小球在A点的机械能与参考平面选取无关
A、小球在A点的重力势能为 B、小球在桌面高度处的动能为mgH C、由A到B的下落过程中小球机械能减少了 D、小球在A点的机械能与参考平面选取无关 -
7、如图所示是一种台阶式的自动扶梯,扶梯倾角为 , 一质量为m的人站在水平台阶上,随着扶梯一起以速度v斜向下做匀速运动,运动时间为t,重力加速度大小为g,则( )
 A、摩擦力对人做负功 B、合外力对人做正功 C、重力做功功率为 D、支持力做功为
A、摩擦力对人做负功 B、合外力对人做正功 C、重力做功功率为 D、支持力做功为 -
8、如图甲所示,圆形导线框中磁场,的大小随时间t周期性变化,使平行金属板M、N间获得如图乙的周期性变化的电压。M、N中心的小孔P、Q的连线与金属板垂直,N板右侧匀强磁场(磁感应强度为)的区域足够大。绝缘档板C垂直N板放置,距小孔Q点的距离为h。现使置于P处的粒子源持续不断地沿PQ方向释放出质量为m、电量为q的带正电粒子(其重力、初速度、相互间作用力忽略不计)。
 (1)、在时间内,大小按的规律增大,此时M板电势比N板高,请判断此时的方向。试求,圆形导线框的面积S多大才能使M、N间电压大小为U?(2)、若其中某一带电粒子从Q孔射入磁场后打到C板上,测得其落点距N板距离为2h,则该粒子从Q孔射入磁场时的速度多大?(3)、若M、N两板间距d满足以下关系式: , 则在什么时刻由P处释放的粒子恰能到达Q孔但不会从Q孔射入磁场?结果用周期T的函数表示。
(1)、在时间内,大小按的规律增大,此时M板电势比N板高,请判断此时的方向。试求,圆形导线框的面积S多大才能使M、N间电压大小为U?(2)、若其中某一带电粒子从Q孔射入磁场后打到C板上,测得其落点距N板距离为2h,则该粒子从Q孔射入磁场时的速度多大?(3)、若M、N两板间距d满足以下关系式: , 则在什么时刻由P处释放的粒子恰能到达Q孔但不会从Q孔射入磁场?结果用周期T的函数表示。 -
9、图甲为战国时期青铜汲酒器,根据其原理制作了由中空圆柱形长柄和储液罐组成的汲液器,如图乙所示。长柄顶部封闭,横截面积S1=1.0cm2 , 长度H=100.0cm,侧壁有一小孔A。储液罐的横截面积S2=90.0cm2 , 高度h=20.0cm,罐底有一小孔B。汲液时,将汲液器竖直浸入液体,液体从孔B进入,空气由孔A排出;当内外液面相平时,长柄浸入液面部分的长度为x;堵住孔A,缓慢地将汲液器竖直提出液面,储液罐内刚好储满液体。已知液体密度ρ=1.0×103kg/m3 , 重力加速度大小g=10m/s2 , 大气压p0=1.0×105Pa。整个过程温度保持不变,空气可视为理想气体,忽略器壁厚度。
(1)求x;
(2)松开孔A,从外界进入压强为p0、体积为V的空气,使满储液罐中液体缓缓流出,堵住孔A,稳定后罐中恰好剩余一半的液体,求V。

-
10、如图所示,一定量理想气体的循环由下面4个过程组成:1→2为绝热过程(过程中气体不与外界交换热量),2→3为等压过程,3→4为绝热过程,4→1为等容过程。上述四个过程是四冲程柴油机工作循环的主要过程。下列说法中正确的是( )
 A、1→2过程中,气体内能不变 B、2→3过程中,气体向外放热 C、3→4过程中,气体内能减小 D、4→1过程中,气体向外放热
A、1→2过程中,气体内能不变 B、2→3过程中,气体向外放热 C、3→4过程中,气体内能减小 D、4→1过程中,气体向外放热 -
11、如图甲所示,三角形线圈abc水平放置,在线圈所处区域存在一变化的磁场,其变化规律如图乙所示。线圈在外力作用下处于静止状态,规定垂直于线圈平面向下的磁场方向为正方向,垂直ab边斜向下的受力方向为正方向,线圈中感应电流沿abca方向为正,则线圈内电流及ab边所受安培力随时间变化规律是( )
 A、
A、 B、
B、 C、
C、 D、
D、
-
12、某理论研究认为,原子核可能发生双衰变,衰变方程为。处于第二激发态的原子核先后辐射能量分别为和的、两光子后回到基态。下列说法正确的是( )A、 B、 C、的频率比的大 D、的波长比的大
-
13、如图甲所示,列车车头底部安装强磁铁,线圈及电流测量仪埋设在轨道地面(测量仪未画出),P、Q为接测量仪器的端口,磁铁的匀强磁场垂直地面向下、宽度与线圈宽度相同,俯视图如图乙所示。当列车经过线圈上方时,测量仪记录线圈的电流为0.12A。磁铁的磁感应强度为0.005T,线圈的匝数为5,长为0.2m,电阻为 , 则在列车经过线圈的过程中,下列说法中正确的是( )
 A、线圈的安培力大小为 B、线圈的磁通量一直增加 C、列车运行的速率为12m/s D、线圈的电流方向先顺时针、后逆时针方向
A、线圈的安培力大小为 B、线圈的磁通量一直增加 C、列车运行的速率为12m/s D、线圈的电流方向先顺时针、后逆时针方向 -
14、“西电东送”是我国实现经济跨区域可持续快速发展的重要保证,如图所示为模拟远距离高压输电的示意图。已知升压变压器原、副线圈两端的电压分别为U1和U2 , 降压变压器原、副线圈两端的电压分别为U3和U4 . 在输电线路的起始端接入两个互感器,两个互感器原、副线圈的匝数比分别为20:1和1:20,各互感器和电表均为理想状态,则下列说法中正确的是( )
 A、若保持发电机输出电压U1和用户数不变,仅将滑片Q下移,则输电线损耗功率增大 B、电压互感器起降压作用,电流互感器起增大电流作用 C、若电压表的示数为200V,电流表的示数为5A,则线路输送电功率为100kW D、发电机输出电压U1一定,增加用户数,为维持用户电压U4不变,可将滑片P下移
A、若保持发电机输出电压U1和用户数不变,仅将滑片Q下移,则输电线损耗功率增大 B、电压互感器起降压作用,电流互感器起增大电流作用 C、若电压表的示数为200V,电流表的示数为5A,则线路输送电功率为100kW D、发电机输出电压U1一定,增加用户数,为维持用户电压U4不变,可将滑片P下移 -
15、光伏发电是提供清洁能源的方式之一,光伏发电的原理是光电效应。演示光电效应的实验装置如图甲所示,a、b、c三种光照射光电管得到的三条电流表与电压表示数之间的关系曲线如图乙所示,下列说法中正确的是( )

 A、若b光为绿光,则a光可能是紫光 B、a光照射光电管发出光电子的最大初动能一定大于b光照射光电管发出光电子的最大初动能 C、单位时间内a光照射光电管发出的光电子比c光照射光电管发出的光电子多 D、若用强度相同的a、b光照射该光电管,则单位时间内逸出的光电子数相等
A、若b光为绿光,则a光可能是紫光 B、a光照射光电管发出光电子的最大初动能一定大于b光照射光电管发出光电子的最大初动能 C、单位时间内a光照射光电管发出的光电子比c光照射光电管发出的光电子多 D、若用强度相同的a、b光照射该光电管,则单位时间内逸出的光电子数相等 -
16、为了保证考试的公平,大型考试中广泛使用了金属探测器,图甲就是一款常用的金属探测器,其内部的线圈与电容器构成LC振荡电路,结构原理如图乙所示,线圈靠近金属时,线圈的自感系数增大。若某时刻电路中的电流方向如图所示,电容器A极板带正电,则下列说法正确的是( )
 A、电路中的电流正在增大 B、电容器两板的电压在减小 C、线圈中的自感电动势在增大 D、线圈靠近金属时,LC振荡电路的周期减小
A、电路中的电流正在增大 B、电容器两板的电压在减小 C、线圈中的自感电动势在增大 D、线圈靠近金属时,LC振荡电路的周期减小 -
17、如图所示,磁极间的磁场可视为磁感应强度大小为B的匀强磁场,为垂直于磁场方向的转轴。绕轴匀速转动的矩形线圈abcd的面积为S,匝数为N,电阻为r,转动的角速度为 , 从图示位置开始计时。矩形线圈通过滑环接一电阻箱R,图中电压表V为理想交流电表。下列说法中正确的是( )
 A、矩形线圈从图示位置转过时,电压表的示数为0 B、矩形线圈经过图示位置时,线圈中的电流方向为a→d→c→b→a C、矩形线圈产生的感应电动势的瞬时值表达式为 D、电阻R消耗的最大功率为
A、矩形线圈从图示位置转过时,电压表的示数为0 B、矩形线圈经过图示位置时,线圈中的电流方向为a→d→c→b→a C、矩形线圈产生的感应电动势的瞬时值表达式为 D、电阻R消耗的最大功率为 -
18、如图所示,为竖直光滑圆弧轨道的直径,其半径 , 端沿水平方向。水平轨道与光滑圆弧轨道相接于点,为圆弧轨道的圆心,和与竖直方向的夹角均为 , 圆弧轨道和斜坡交于点。一质量的物块(视为质点)从水平轨道上以一定速度冲上竖直圆轨道,并从点飞出,经过点时恰好沿圆弧轨道切线进入,一段时间后从点飞出。取 , , 重力加速度大小。
 (1)、求物块到达点时的速度大小;(2)、求物块到达点时对圆弧轨道的压力大小;(3)、已知物块经过点时速度大小与经过点时速度大小相等,斜坡倾角的正切值 , 取 , , 求物块从点飞出后落到斜坡上的时间以及此过程中物块离斜坡最远的距离。
(1)、求物块到达点时的速度大小;(2)、求物块到达点时对圆弧轨道的压力大小;(3)、已知物块经过点时速度大小与经过点时速度大小相等,斜坡倾角的正切值 , 取 , , 求物块从点飞出后落到斜坡上的时间以及此过程中物块离斜坡最远的距离。 -
19、某火星探测器登陆火星后,在火星表面以速度v竖直向上抛出一小球,经时间t落地,已知火星半径为R,引力常量为G。求:(1)、火星表面的重力加速度;(2)、火星的质量;(3)、若该探测器要再次起飞成为火星的卫星,需要的最小发射速度的大小。
-
20、某小组在“研究平抛运动特点”的实验中,分别使用了图甲和图乙的实验装置。
 (1)、如图甲所示,小锤水平打击弹性金属片,A球水平抛出的同时B球自由下落。在不同的高度和打击力度时都发现两小球同时落地,则实验表明__________。A、平抛运动竖直方向是自由落体运动 B、平抛运动水平方向是匀速直线运动(2)、图丙是图乙实验中小球从斜槽上不同位置由静止释放获得的两条轨迹,图线①所对应的小球在斜槽上释放的位置(选填“较低”或“较高”)。(3)、如图丁所示,实验小组记录了小球在运动过程中经过A、B、C三个位置,每个正方形小格的边长为5.00cm,g取 , 则该小球做平抛运动的初速度大小m/s;小球的抛出点是否在点(选填“是”或“不是”)。
(1)、如图甲所示,小锤水平打击弹性金属片,A球水平抛出的同时B球自由下落。在不同的高度和打击力度时都发现两小球同时落地,则实验表明__________。A、平抛运动竖直方向是自由落体运动 B、平抛运动水平方向是匀速直线运动(2)、图丙是图乙实验中小球从斜槽上不同位置由静止释放获得的两条轨迹,图线①所对应的小球在斜槽上释放的位置(选填“较低”或“较高”)。(3)、如图丁所示,实验小组记录了小球在运动过程中经过A、B、C三个位置,每个正方形小格的边长为5.00cm,g取 , 则该小球做平抛运动的初速度大小m/s;小球的抛出点是否在点(选填“是”或“不是”)。