-
1、 2022年11月29日,我国研制的“神舟十五号”载人飞船顺利发射成功,首次实现了航天员在轨轮换。若将地球与“神舟十五号”飞船看成质点,他们之间万有引力的大小为F,如果将这两个质点之间的距离变为原来的2倍,那么它们之间万有引力的大小变为( )A、 B、2F C、 D、4F
-
2、 如图所示,在水平地面上方的O点将小球分别以速度v1和v2水平抛出,从抛出到落地所用时间分别为t1和t2 , 水平位移大小分别为x1和x2。已知v1>v2 , 不计空气阻力,下列关系正确的是( )
 A、t1>t2 B、t1<t2 C、x1>x2 D、x1<x2
A、t1>t2 B、t1<t2 C、x1>x2 D、x1<x2 -
3、 两个力、夹角成90°作用在同一物体上,使物体通过一段位移过程中,对物体做功3J,对物体做功 , 则和的合力对物体做的功W为( )A、 B、 C、 D、
-
4、如图所示,正电子垂直电场方向入射到匀强电场中,不计粒子重力,正电子做( )
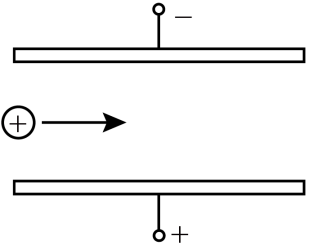 A、匀速直线运动 B、匀加速直线运动 C、向下偏转的曲线运动 D、向上偏转的曲线运动
A、匀速直线运动 B、匀加速直线运动 C、向下偏转的曲线运动 D、向上偏转的曲线运动 -
5、 如图是关于地球表面发射卫星时的三种宇宙速度的示意图,下列说法正确的是( )
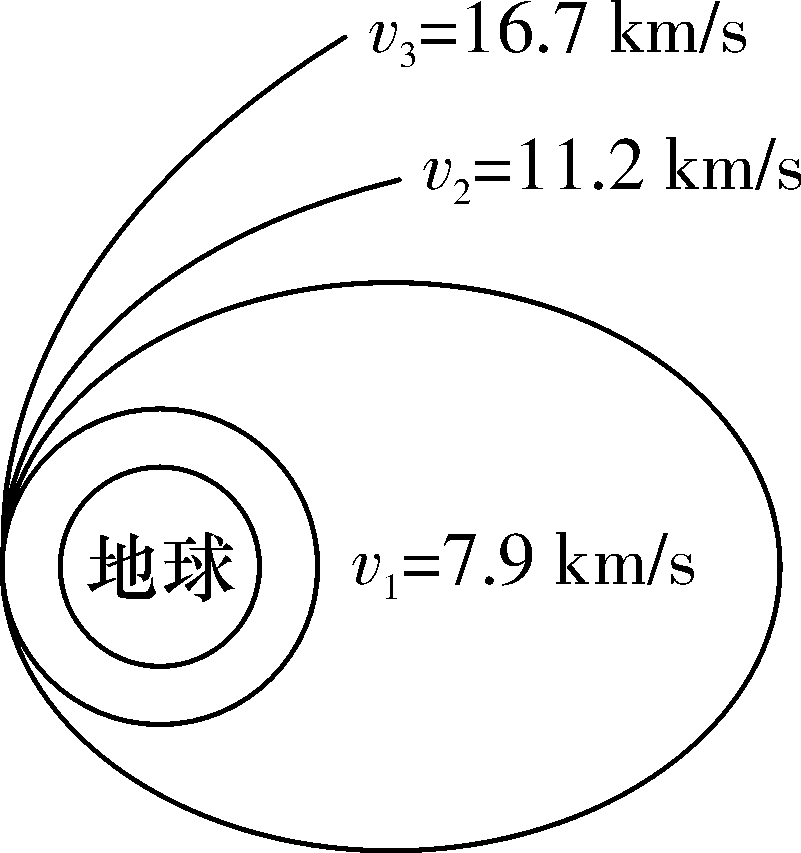 A、在地球表面附近运动的卫星的速度大于第一宇宙速度 B、在地球表面附近运动的卫星的速度等于第一宇宙速度 C、若想让卫星进入月球轨道,发射速度需大于第二宇宙速度 D、若想让卫星进入太阳轨道,发射速度需大于第三宇宙速度
A、在地球表面附近运动的卫星的速度大于第一宇宙速度 B、在地球表面附近运动的卫星的速度等于第一宇宙速度 C、若想让卫星进入月球轨道,发射速度需大于第二宇宙速度 D、若想让卫星进入太阳轨道,发射速度需大于第三宇宙速度 -
6、 甲、乙两物体沿某一直线运动v-t图像如图所示,下列说法正确的是( )
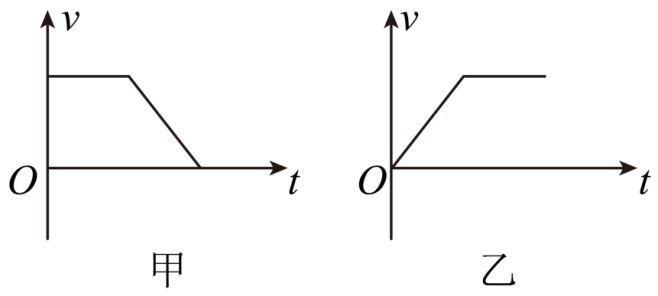 A、甲、乙两物体均从静止开始运动 B、甲物体一直做减速运动,乙物体一直做加速运动 C、甲、乙两物体运动的方向相反 D、甲、乙两物体运动的方向相同
A、甲、乙两物体均从静止开始运动 B、甲物体一直做减速运动,乙物体一直做加速运动 C、甲、乙两物体运动的方向相反 D、甲、乙两物体运动的方向相同 -
7、 如图所示的电路中, , , 闭合开关S,则( )
 A、流过两个电阻的电流之比 B、流过的电流与流过电源的电流之比 C、两个电阻的电压之比 D、两个电阻的功率之比
A、流过两个电阻的电流之比 B、流过的电流与流过电源的电流之比 C、两个电阻的电压之比 D、两个电阻的功率之比 -
8、 如图所示,地球可以看作一个球体,位于上海的物体A和位于赤道上的物体B,都随地球的自转做匀速圆周运动,则( )
 A、物体的周期 B、物体的周期 C、物体的线速度大小 D、物体的角速度大小
A、物体的周期 B、物体的周期 C、物体的线速度大小 D、物体的角速度大小 -
9、 小明从20m高处自由释放一小铁球,则小铁球下落10m的时间和落到地面的时间分别是( )()A、1s、2s B、1s、4s C、、2s D、、4s
-
10、 如图所示,甲、乙两人踩着滑雪板在冰面上“拔河”。若绳子质量不计,冰面可看成光滑,甲的质量比乙大,拉绳时手与绳没有发生相对滑动,则在“拔河”比赛中,下列说法正确的是( )
 A、甲对乙的拉力大 B、乙对甲的拉力大 C、甲的惯性大 D、乙的惯性大
A、甲对乙的拉力大 B、乙对甲的拉力大 C、甲的惯性大 D、乙的惯性大 -
11、 以下四种不同的电场中有a、b两点,此两点电场强度相同的是( )A、
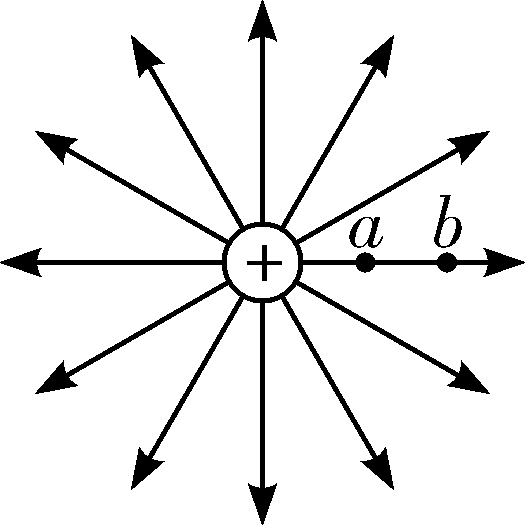 B、
B、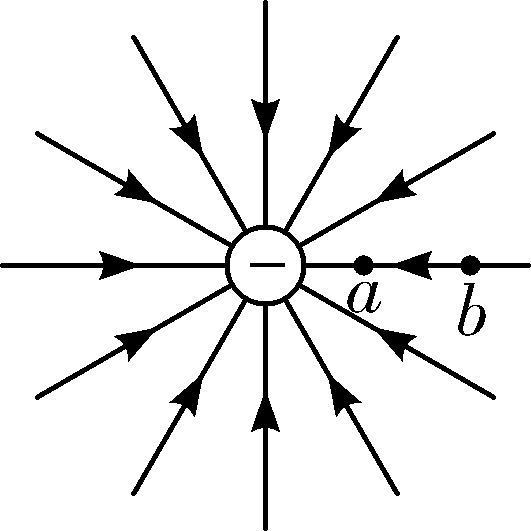 C、
C、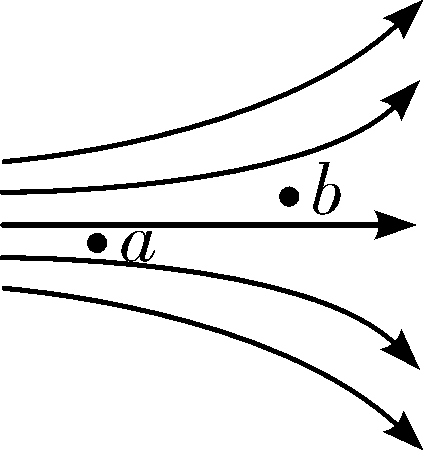 D、
D、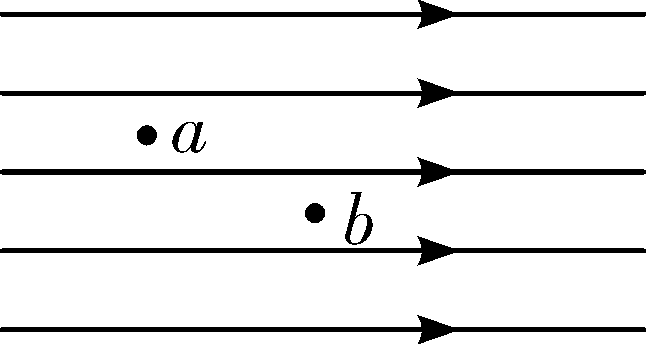
-
12、 如图所示,重为6N的物体挂在轻质弹簧的下端时,弹簧伸长了0.02m。现换用另一个重为9N的物体挂在弹簧的下端(形变仍在弹性限度内),这时弹簧的伸长量、劲度系数分别是( )
 A、0.02m、200N/m B、0.03m、450N/m C、0.03m、300N/m D、0.05m、900N/m
A、0.02m、200N/m B、0.03m、450N/m C、0.03m、300N/m D、0.05m、900N/m -
13、 汽车在水平面上做匀加速直线运动,从某时刻开始它的加速度减小但方向不变,则( )A、汽车的速度也减小 B、汽车的速度仍在增大 C、当加速度减小到零时,汽车静止 D、当加速度减小到零时,汽车的位移也为零
-
14、 下列说法指时刻的是( )A、2秒末 B、前2秒 C、后2秒 D、第2秒
-
15、 如图所示,半径R=1.0m的光滑圆弧轨道固定在竖直平面内,轨道的一个端点B和圆心O的连线与水平方向间的夹角θ=37°,另一端点C为轨道的最低点。C点右侧的水平路面上紧挨C点放置一木板,木板质量M=1kg,上表面与C点等高。质量m=1kg的物块(可视为质点)从空中A点以v0=1.2m/s的速度水平抛出,恰好从轨道的B端沿切线方向进入轨道。已知物块与木板间的动摩擦因数μ1=0.2,木板与路面间的动摩擦因数μ2 , 取g=10m/s2 , sin37°=0.6,cos37°=0.8。试求:
 (1)、物块经过B端时速度的大小;(2)、物块经过轨道上的C点时对轨道的压力大小;(3)、若μ2的大小可以变化,要使物块不从木板上滑下来,木板至少的长度L与μ2的关系。
(1)、物块经过B端时速度的大小;(2)、物块经过轨道上的C点时对轨道的压力大小;(3)、若μ2的大小可以变化,要使物块不从木板上滑下来,木板至少的长度L与μ2的关系。 -
16、 如图所示装置可绕竖直轴OO'转动,可视为质点的小球A与两细线连接后分别系于B、C两点,当细线AB沿水平方向绷直时,细线AC与竖直方向的夹角θ=37°。已知小球的质量m=1 kg,细线AC长L=0.5m,AB能承受的最大拉力为22.5N。(重力加速度g取10m/s2 , sin37°=0.6,cos37°=0.8)
 (1)、若装置匀速转动,细线AB刚好被拉直成水平状态,求此时的角速度ω1的大小;(2)、若装置匀速转动的角速度ω2=8rad/s,求细线AB和AC上的拉力大小TAB、TAC;(3)、若装置匀速转动的角速度ω3=15rad/s,求系统稳定转动后细线AC上的拉力大小T'AC。
(1)、若装置匀速转动,细线AB刚好被拉直成水平状态,求此时的角速度ω1的大小;(2)、若装置匀速转动的角速度ω2=8rad/s,求细线AB和AC上的拉力大小TAB、TAC;(3)、若装置匀速转动的角速度ω3=15rad/s,求系统稳定转动后细线AC上的拉力大小T'AC。 -
17、 宇航员站在某半径为的星球表面上,手持小球从高度为处以一定初速度水平抛出,小球落到星球表面上的点与抛出点的水平距离为 , 抛出范围内该星球表面水平及忽略星球自转影响,空气阻力不计,求:(1)、该星球表面的重力加速度和星球的质量;(2)、该星球的第一宇宙速度。
-
18、 某学习小组利用如图甲所示装置测当地的重力加速度,小球直径为d。小球被电磁铁吸住时,球心到光电门的距离为h,电磁铁断电,小球从A处开始做自由落体运动,小球通过光电门时光电门的遮光时间为。完成以下问题:
 (1)、用毫米刻度尺测小球的直径d如图乙所示,则小球的直径为mm。(2)、小球通过光电门1时的速度大小v=。(用字母表示)(3)、多次调节球心到光电门的距离h,记录对应的 , 获多组实验数据后,画出图像如图丙,并通过计算得到图像丙的斜率为k,则当地重力加速度g=。(用字母表示)
(1)、用毫米刻度尺测小球的直径d如图乙所示,则小球的直径为mm。(2)、小球通过光电门1时的速度大小v=。(用字母表示)(3)、多次调节球心到光电门的距离h,记录对应的 , 获多组实验数据后,画出图像如图丙,并通过计算得到图像丙的斜率为k,则当地重力加速度g=。(用字母表示) -
19、 某学校新进了一批传感器,小明在老师指导下,在实验室利用传感器探究物体做圆周运动的向心力与物体质量、轨道半径及转速的关系。实验装置如图甲所示。带孔的小清块套在光滑的水平细杆上。通过细杆与固定在转轴上的拉力传感器相连。小滑块上固定有转速传感器。细杆可绕转轴做匀速圆周运动小明先保持滑块质量和轨道半径不变来探究向心力与转速的关系。
 (1)、小明采用的实验方法主要是____。(填正确答案标号)A、理想模型法 B、控制变量法 C、等效替代法(2)、若拉力传感器的示数为F,转速传感器的示数为n,小明通过改变转速测量出多组数据,作出了如图乙所示的图像,则小明选取的横坐标可能是____。A、n B、 C、 D、(3)、小明测得滑块做圆周运动的半径为r,若F、r、n均取国际单位,图乙中图线的斜率为k,则滑块的质量可表示为m=。
(1)、小明采用的实验方法主要是____。(填正确答案标号)A、理想模型法 B、控制变量法 C、等效替代法(2)、若拉力传感器的示数为F,转速传感器的示数为n,小明通过改变转速测量出多组数据,作出了如图乙所示的图像,则小明选取的横坐标可能是____。A、n B、 C、 D、(3)、小明测得滑块做圆周运动的半径为r,若F、r、n均取国际单位,图乙中图线的斜率为k,则滑块的质量可表示为m=。 -
20、 如图所示,质量为m的小物块(可视为质点)从斜坡坡顶B处由静止下滑,到达坡底A处被截停,在水平恒力F的作用下,小物块从斜坡底部A处缓慢运动至坡顶。已知A、B之间的水平距离为s、高度为h,重力加速度为g。则下列说法正确的是( )
 A、下滑过程中,小物块重力做的功是 B、推力F对小物块做的功大于 C、上滑过程中,小物块克服摩擦力做功为 D、无论是上滑还是下滑,小物块在这两个阶段克服摩擦力做的功相等
A、下滑过程中,小物块重力做的功是 B、推力F对小物块做的功大于 C、上滑过程中,小物块克服摩擦力做功为 D、无论是上滑还是下滑,小物块在这两个阶段克服摩擦力做的功相等