相关试卷
- 广东省惠州市2017年高考物理一调试卷
- 广东省阳江市2016-2017学年高二下学期物理期末考试试卷
- 广东省佛山市高明一中2016-2017学年高一下学期物理期末模拟试卷
- 广东省珠海市2016-2017学年高二上学期物理期末考试试卷(b卷)
- 广东省惠州市2016-2017学年高二上学期物理期末考试试卷
- 浙江省嘉兴市2016-2017学年高三上学期物理期末考试试卷
- 辽宁省沈阳市2016-2017学年高三上学期物理期末考试试卷
- 江西省赣州市2016-2017学年高三上学期物理期末考试试卷
- 广东省清远市清城区2016-2017学年高三上学期物理期末考试试卷(b卷)
- 2016-2017学年广东省肇庆市高一上学期期末物理试卷
-
1、如图所示,小李从水平地面上的A点将足球正对着竖直墙壁向右贴地踢出,足球经过0.4s撞上墙壁,被墙壁反弹后(足球与墙壁接触时间可忽略不计)经1.6s运动至B点。已知A、B点到竖直墙壁的距离分别为0.8m、2.0m,足球可视为质点,取水平向右为正方向,则足球从被踢出到运动至B点的平均速度为( )
 A、0.6m/s B、-0.6m/s C、1.4m/s D、-1.4m/s
A、0.6m/s B、-0.6m/s C、1.4m/s D、-1.4m/s -
2、如图所示的装置中,三个相同的轻弹簧在未受力状态下的原长相等,小球的质量均相同,弹簧和细线的质量均不计,一切摩擦忽略不计。平衡时各弹簧的长度分别为L1、L2、L3 , 弹簧在弹性限度内,其大小关系是( )
 A、 B、 C、 D、
A、 B、 C、 D、 -
3、物价变化趋势与市场供给和调控息息相关,若将物价的“上涨”类比成“加速”,将物价的“下跌”类比成“减速”,据此,你认为“物价下跌出现变缓趋势”可类比成( )A、加速度增大的加速运动 B、加速度减小的加速运动 C、加速度减小的减速运动 D、加速度增大的减速运动
-
4、高铁开通后,从铁路售票网12306查询到G8421次列车的信息如图所示,用电子地图测距工具测得惠来站到广州东站的直线距离约为325km,下列说法正确的是( )
8:53 1时48分 10:41
惠来站 经停站 广州东站
刷身份证进出站 G8421
购票须知
A、图中1时48分表示时刻 B、图中8时53分表示时间间隔 C、325km表示惠来站到广州东站的路程 D、研究列车在地图上的位置,可视列车为质点 -
5、下列关于重力、摩擦力的说法正确的是( )A、只有运动的物体才会受到滑动摩擦力 B、静摩擦力方向总是与物体的运动方向相反 C、因为物体本身就有重力,所以重力没有施力物体 D、两物体间如果有相互作用的摩擦力,就一定存在弹力
-
6、汽车分别通过ETC通道和人工收费通道的流程如图所示。假设汽车以的速度沿直线朝着收费站正常行驶,如果过ETC通道,需要在汽车运动到通道口时速度恰好减为 , 然后匀速通过总长度为的通道,接着再匀加速至v1后正常行驶;如果过人工收费通道,需要先做匀减速运动,至中心线处速度恰好减为零,经过的时间缴费成功后,再启动汽车匀加速至v1后正常行驶。设汽车加速和减速过程中的加速度大小均为 , 求:
(1)汽车走人工收费通道需要在距收费中心线多远处开始减速?
(2)汽车过ETC通道时,从开始减速到恢复正常行驶的过程中的位移x;
(3)汽车通过ETC通道比通过人工收费通道节约的时间。

-
7、某地利用无人机定点空投生活物资,假设由静止释放的一包物资,经3s刚好着地,忽略空气阻力的作用,g=10m/s2 , 求:
 (1)、释放后2s末物资的速度大小;(2)、无人机距离地面的高度;(3)、物资落地前最后1s内的位移。
(1)、释放后2s末物资的速度大小;(2)、无人机距离地面的高度;(3)、物资落地前最后1s内的位移。 -
8、“探究力的平行四边形定则”的实验如图所示,其中A为固定橡皮筋的图钉,O为橡皮筋与细绳的结点,OB和OC为细绳,图是在白纸上根据实验数据画出的图.

(1)实验中必须保证两次将橡皮筋与细绳的结点O拉到同一位置,本实验主要采用的科学方法是 .
A.理想实验法
B.等效替代法
C.控制变量法
D.建立物理模型法
(2)图乙作出的F与两力中,方向一定沿AO方向的是 .
(3)若认为图乙中F与大小相等,方向略有偏差,如果此偏差仅由大小引起,则原因是的大小比真实值偏 . 选填“大”或“小”
-
9、为了测量弹簧的劲度系数,某同学进行了如下实验.将一弹簧竖直悬挂在铁架台上,用弹簧测力计拉弹簧下端,同时记下弹簧总长度和弹簧测力计的示数,记录的数据如下表:
次数
1
2
3
4
5
6
弹簧总长L(单位:cm)
2.41
3.00
3.41
3.80
4.60
5.00
弹力F(单位:N)
0.71
1.28
2.21
4.05
4.60
请完成以下问题:

(1)第4次操作时,弹簧测力计的示数如图甲所示,请读出其示数F4=N.
(2)除第4次的数据外,其他均已在图乙中描点,请你把第4次数据在图乙中描点,并作F﹣L图象 .
(3)根据F﹣L图象可得弹簧的劲度系数k=N/m(保留三位有效数字).
-
10、如图,用两根等长的细绳把奖牌悬在天花板上,两细绳所受作用力大小等于奖牌重力大小的是( )A、
 B、
B、 C、
C、 D、
D、
-
11、用手握住瓶子,使瓶子在竖直方向始终静止,则( )
 A、握力越大,手对瓶子的摩擦力越大 B、向瓶子中加水,手对瓶子的摩擦力变大 C、瓶子对手的摩擦力方向向下 D、手越干越粗糙,对瓶子的摩擦力越大
A、握力越大,手对瓶子的摩擦力越大 B、向瓶子中加水,手对瓶子的摩擦力变大 C、瓶子对手的摩擦力方向向下 D、手越干越粗糙,对瓶子的摩擦力越大 -
12、甲、乙两辆遥控小车沿同一平直轨道做直线运动,其图像如图所示。以甲车运动方向为正方向,若两车( )
 A、从同一位置出发,则在前内两车没有相遇 B、在时相遇,则初始时两车相距 C、在时相遇,则时两车再次相遇 D、在时相遇,则之后两车距离越来越远
A、从同一位置出发,则在前内两车没有相遇 B、在时相遇,则初始时两车相距 C、在时相遇,则时两车再次相遇 D、在时相遇,则之后两车距离越来越远 -
13、一钢球由静止做自由落体运动,不计空气阻力,落地的速度为50m/s,g取 , 下列说法正确的是( )A、钢球下落的高度为50m B、最后1s下落的高度为50m C、第1s内、第2s内、第3s内的平均速度之比为1:2:3 D、前1s内、前2s内、前3s内的平均速度之比为1:2:3
-
14、某同学骑自行车上学,某段时间内沿平直公路运动的图像如图所示。该同学与自行车整体可视为质点,由图像可知下列说法错误的是( )
 A、在时间内,自行车骑行的加速度逐渐变小 B、在时间内,自行车骑行的平均速度大于 C、在时间内,自行车刹车时的加速度大小为 D、在时间内,自行车骑行的总位移等于
A、在时间内,自行车骑行的加速度逐渐变小 B、在时间内,自行车骑行的平均速度大于 C、在时间内,自行车刹车时的加速度大小为 D、在时间内,自行车骑行的总位移等于 -
15、意大利科学家伽利略在研究物体变速运动规律时,做了著名的“斜面实验”,他测量了铜球在较小倾角斜面上的运动情况,且铜球加速度随斜面倾角的增大而增大,于是他对大倾角情况进行了合理的外推( )A、力不是维持物体运动的原因 B、力是使物体产生加速度的原因 C、自由落体运动是一种匀变速直线运动 D、物体都具有保持原来运动状态的属性,即惯性
-
16、如图所示为一对不等量异种点电荷的电场线分布,下列说法正确的是( )
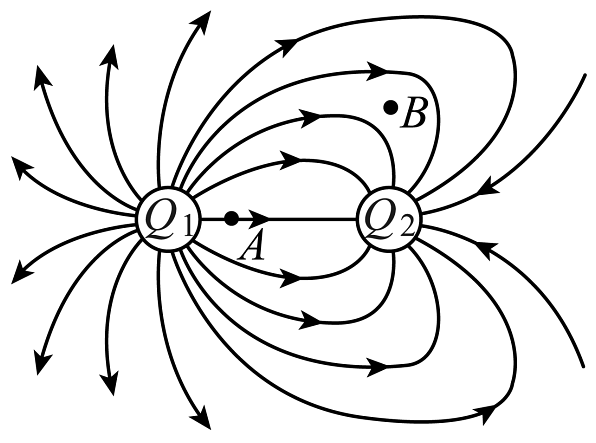 A、Q1对Q2的静电力大于Q2对Q1的静电力 B、B处没画电场线,故B处电场强度为零 C、Q1、Q2所带的电荷量是元电荷的整数倍 D、根据电场强度的定义式可知,A处电场强度与试探电荷无关
A、Q1对Q2的静电力大于Q2对Q1的静电力 B、B处没画电场线,故B处电场强度为零 C、Q1、Q2所带的电荷量是元电荷的整数倍 D、根据电场强度的定义式可知,A处电场强度与试探电荷无关 -
17、如图所示的电路中,通过电阻R1的电流I1是( )
 A、 B、 C、 D、
A、 B、 C、 D、 -
18、某兴趣小组进行“测量金属丝的电阻率”实验,他们用伏安法测得长为1.00 m电阻丝的阻值为0.50Ω,用螺旋测微器测量金属丝直径,读数如图所示。关于电阻丝的测量和计算结果正确的有( )
 A、直径为1.600mm B、直径为2.100mm C、电阻率约1.0×10-6Ω·m D、电阻率约1.0×10-9Ω·m
A、直径为1.600mm B、直径为2.100mm C、电阻率约1.0×10-6Ω·m D、电阻率约1.0×10-9Ω·m -
19、如图为某规格的电容器(80V,1000μF),下列关于该电容器的说法正确的是( )
 A、该电容器只有接80V的恒定电压时才能工作 B、给该电容器充电或放电过程中有电荷流过电容器 C、电容器上不带电,其电容也是1000μF D、外壳上所标的80V指的是额定电压
A、该电容器只有接80V的恒定电压时才能工作 B、给该电容器充电或放电过程中有电荷流过电容器 C、电容器上不带电,其电容也是1000μF D、外壳上所标的80V指的是额定电压 -
20、在图所示的电场中有M、N两点,下列说法正确的是( )
 A、该电场不是匀强电场 B、M点的电场强度比N点的大 C、同一正电荷在N点受到的电场力比M点的大 D、M点和N点的电场方向相同
A、该电场不是匀强电场 B、M点的电场强度比N点的大 C、同一正电荷在N点受到的电场力比M点的大 D、M点和N点的电场方向相同