-
1、如图为斧子劈开树桩的实例,树桩容易被劈开是因为形的斧锋在砍进木桩时,斧刃两侧会对木桩产生很大的侧向压力,将此过程简化成力学模型,已知斧子是竖直向下且对木桩施加一个竖直向下的力F , 斧子形的夹角为θ , 则( )
 A、斧子对木桩的侧向压力大小为 B、斧子对木桩的侧向压力大小为 C、斧锋夹角越大,斧子对木桩的侧向压力越大 D、斧锋夹角越小,斧子对木桩的侧向压力越大
A、斧子对木桩的侧向压力大小为 B、斧子对木桩的侧向压力大小为 C、斧锋夹角越大,斧子对木桩的侧向压力越大 D、斧锋夹角越小,斧子对木桩的侧向压力越大 -
2、如图所示,自由下落的小球下落一段时间后,与弹簧接触,从它接触弹簧开始,到弹簧压缩到最短的过程中,则( )
 A、小球立即做减速运动 B、小球一直做加速运动且加速度不变 C、小球所受的弹簧弹力等于重力时,小球速度最大 D、当弹簧处于最大压缩量时,小球的加速度方向向上
A、小球立即做减速运动 B、小球一直做加速运动且加速度不变 C、小球所受的弹簧弹力等于重力时,小球速度最大 D、当弹簧处于最大压缩量时,小球的加速度方向向上 -
3、关于加速度、速度和力的叙述中,下面的结论正确的是( )A、加速度的大小表示物体速度随时间变化率的大小 B、物体运动的速度变化量越大,它的加速度一定越大 C、加速度的方向一定跟物体速度变化量的方向相同 D、加速度的方向一定跟物体所受合外力的方向相同
-
4、如图所示,质量均为m的物块a、b之间用竖直轻弹簧相连,系在a上的细线竖直悬挂于固定点O , a、b与竖直粗糙墙壁接触,整个系统处于静止状态。重力加速度大小为g , 则( )
 A、弹簧弹力可能小于mg B、细线的拉力可能等于mg C、剪断细线瞬间物块b的加速度大小为g D、剪断细线瞬间物块a的加速度大小为2g
A、弹簧弹力可能小于mg B、细线的拉力可能等于mg C、剪断细线瞬间物块b的加速度大小为g D、剪断细线瞬间物块a的加速度大小为2g -
5、某兴趣小组准备测定列车行驶的加速度。列车在平直轨道上行驶,他们在列车车厢的顶部用细线悬挂一个小球,小球与车厢保持相对静止时细线与竖直方向的夹角为θ , 如图所示。则对于列车可能的运动状态及加速度大小的说法正确的是( )
 A、向左匀减速运动, B、向右匀加速运动, C、向左匀加速运动, D、向右匀减速运动,
A、向左匀减速运动, B、向右匀加速运动, C、向左匀加速运动, D、向右匀减速运动, -
6、如图,倾角为、质量为M的斜面体静止在水平桌面上,质量为m的木块在水平拉力F的作用下静止在斜面体上,下列结论正确的是( )
 A、木块一定受到4个力的作用 B、斜面体可能受到4个力的作用 C、木块对斜面体的压力产生的原因是斜面体发生了形变 D、斜面体对地面的摩擦力大小等于F , 方向水平向左
A、木块一定受到4个力的作用 B、斜面体可能受到4个力的作用 C、木块对斜面体的压力产生的原因是斜面体发生了形变 D、斜面体对地面的摩擦力大小等于F , 方向水平向左 -
7、如图甲所示,通过一拉力传感器(能测量力大小的装置)水平向右拉一水平面上质量为5.0kg的木块,A端的拉力均匀增加,时间内木块静止,木块运动后改变拉力,使木块在辆后做匀速直线运动。计算机对数据拟合处理后,得到如图乙所示拉力随时间变化的图线,下列说法正确的是(取)( )
 A、当F=6.0N时,木块与水平面间的摩擦力 B、若继续增大拉力至F=10.0N,则木块与水平面间的摩擦力 C、木块与水平面间的动摩擦因数为 D、木块与水平面间的动摩擦因数为
A、当F=6.0N时,木块与水平面间的摩擦力 B、若继续增大拉力至F=10.0N,则木块与水平面间的摩擦力 C、木块与水平面间的动摩擦因数为 D、木块与水平面间的动摩擦因数为 -
8、一个做自由落体运动的物体,其落地速度为20m/s,重力加速度g取 , 则下列描述正确的是( )A、下落的时间为3s B、下落时距地面的高度为25m C、下落过程中的平均速度为5m/s D、最后1s的位移为15m
-
9、甲、乙两物体从同一点出发且在同一条直线上运动,它们的位移—时间()图像如图所示,下列说法正确的是( )
 A、甲物体第1s末的加速度大于第4s末的加速度 B、0~3s内甲的平均速度小于乙的平均速度 C、第4s末甲、乙两物体相遇 D、0~6s内甲的速度方向未发生改变
A、甲物体第1s末的加速度大于第4s末的加速度 B、0~3s内甲的平均速度小于乙的平均速度 C、第4s末甲、乙两物体相遇 D、0~6s内甲的速度方向未发生改变 -
10、关于物理学史和物理学研究方法,下列说法正确的是( )A、在研究物体的运动时,满足一定条件可将物体抽象成质点,这样的研究方法叫“微元法” B、亚里士多德研究下落物体的运动时,把实验和逻辑推理(包括数学演算)结合起来,拓展了人类的科学思维方式和研究方法 C、伽利略在研究力和运动的关系时,依据逻辑推理把实际实验理想化的思想是研究物理问题的重要方法 D、是利用比值定义法定义的物理量,由公式可知加速度a与成正比
-
11、如图,质量为m的a球(中间有一个小孔)穿在足够长的光滑水平杆上。b球质量为km,a球和b球用长为L的轻杆相连。从图示位置,先给b球一个竖直向上的初速度v0 , 让b球越过最高点,假设b球连同轻杆在运动过程中均不会与水平杆相碰(稍微错开,但错开距离忽略不计,重力加速度为g)。
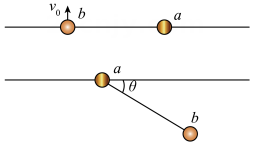 (1)、求球到达最高点时,球的位移大小;(2)、以球初始位置为坐标原点,水平向右为轴正方向,竖直向上为轴正方向,求球运动的轨迹方程;(3)、当 球运动到水平杆下方, 且轻杆与水平杆正方向夹角为 时, 求 球的速度大小。
(1)、求球到达最高点时,球的位移大小;(2)、以球初始位置为坐标原点,水平向右为轴正方向,竖直向上为轴正方向,求球运动的轨迹方程;(3)、当 球运动到水平杆下方, 且轻杆与水平杆正方向夹角为 时, 求 球的速度大小。 -
12、如图甲所示,足够长的平行金属导轨MN、PQ固定在同一水平面上,其宽度 , 导轨与之间连接阻值为的电阻,质量为、电阻为、长度为的金属杆ab静置在导轨上,整个装置处于坚直向下的匀强磁场中。现用一垂直杆水平向右的恒力拉金属杆ab,使它由静止开始运动,运动中金属杆与导轨接触良好并保持与导轨垂直,其通过电阻上的电荷量与时间的关系如图乙所示,图像中的OA段为曲线,AB段为直线,导轨电阻不计,已知ab与导轨间的动摩擦因数 , 取(忽.略ab杆运动过程中对原磁场的影响),求:
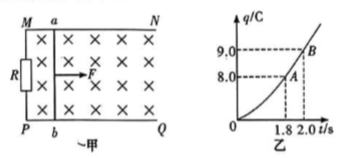 (1)、磁感应强度的大小和金属杆的最大速度;(2)、金属杆ab从开始运动的内所通过的位移;(3)、从开始运动到电阻产生热量时,金属杆ab所通过的位移。
(1)、磁感应强度的大小和金属杆的最大速度;(2)、金属杆ab从开始运动的内所通过的位移;(3)、从开始运动到电阻产生热量时,金属杆ab所通过的位移。 -
13、如图所示,用两个质量均为、横截面积均为的密闭活塞P、Q,将开口向上的导热汽缸内的理想气体分成A、B两部分。上面活塞通过轻绳悬挂在天花板上,汽缸和汽缸下方通过轻质绳子悬挂的物块的质量均为2m,整个装置处于静止状态,此时两部分气柱的长度均为。环境温度、大气压强p0均保持不变,且满足 , g为重力加速度,不计一切摩擦。
 (1)、求此时气体的压强;(2)、剪断连接物块的绳子,一段时间后两活塞重新恢复平衡,求汽缸上升的距离。
(1)、求此时气体的压强;(2)、剪断连接物块的绳子,一段时间后两活塞重新恢复平衡,求汽缸上升的距离。 -
14、)电池长时间使用后其电动势和内阻都可能发生变化,为了探究某电池的实际电动势和内阻,某同学设计方案对其进行测量。
A.待测电池(电动势约 , 内阻未知)
B.电压表(量程 , 内阻为)
C.电流表(量程 , 内阻较小约为)
D.电阻箱
E.滑动变阻器
F.开关、导线若干
 (1)、实验时需要对电表进行改装,若将电压表最大量程扩大为 , 则应该串联的阻值应为;将电流表的量程扩大为 , 该同学采用了以下的操作:按图甲连接好实验器材,检查电路无误后,将断开,将的滑片移至(填“最左端”或“最右端”),将电阻箱调为最大,闭合 , 适当移动的滑片,使电流表示数为 , 保持接人电路中的阻值不变,再闭合 , 改变电阻箱的阻值,当电流表示数为时,完成扩大量程。(2)、保持电阻箱的阻值不变,闭合 , 调节不同的阻值,读出两个电表的读数U、I,并作出图像如图乙所示,可测得该电池的电动势 , 内阻。(结果保留2位有效数字)
(1)、实验时需要对电表进行改装,若将电压表最大量程扩大为 , 则应该串联的阻值应为;将电流表的量程扩大为 , 该同学采用了以下的操作:按图甲连接好实验器材,检查电路无误后,将断开,将的滑片移至(填“最左端”或“最右端”),将电阻箱调为最大,闭合 , 适当移动的滑片,使电流表示数为 , 保持接人电路中的阻值不变,再闭合 , 改变电阻箱的阻值,当电流表示数为时,完成扩大量程。(2)、保持电阻箱的阻值不变,闭合 , 调节不同的阻值,读出两个电表的读数U、I,并作出图像如图乙所示,可测得该电池的电动势 , 内阻。(结果保留2位有效数字) -
15、某实验小组为测重力加速度,采用如图甲所示的装置,不可伸长的轻绳一端固定于悬点,另一端系一小球,在小球自然悬垂的位置上安装一个光电门(图中没有画出),光电门接通电源,发出的光线与小球的球心在同一水平线上。
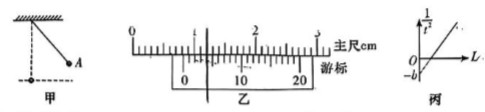 (1)、现用游标卡尺测得小球直径如图乙所示,则小球的直径为(2)、在实验中,小组成员多次改变同一小球自然下垂时球的下沿到悬点的距离 , 同时调整光电门的位置使光线与球心始终在同一水平线上,实验时将小球拉至其球心与悬点处于同一水平面处,轻绳伸直,由静止释放小球,记录小球通过光电门的时间。得到多组和的数据,作出如图丙所示的图像,图线的纵截距为 , 则当地的重力加速度(用字母和表示)。(3)、若光电门发出的光线高于小球自然下垂的球心位置,小球动能的测量值将(选填“偏大”“偏小”或“不变”)。
(1)、现用游标卡尺测得小球直径如图乙所示,则小球的直径为(2)、在实验中,小组成员多次改变同一小球自然下垂时球的下沿到悬点的距离 , 同时调整光电门的位置使光线与球心始终在同一水平线上,实验时将小球拉至其球心与悬点处于同一水平面处,轻绳伸直,由静止释放小球,记录小球通过光电门的时间。得到多组和的数据,作出如图丙所示的图像,图线的纵截距为 , 则当地的重力加速度(用字母和表示)。(3)、若光电门发出的光线高于小球自然下垂的球心位置,小球动能的测量值将(选填“偏大”“偏小”或“不变”)。 -
16、蜜蜂飞行时依靠蜂房、采蜜地点和太阳三个点进行定位做“8”字形运动,以此告知同伴蜜源方位。某兴趣小组用带电粒子在电场和磁场中的运动模拟蜜蜂的运动。如图所示,空间存在范围足够大垂直纸面、方向相反的匀强磁场I、II,其上、下边界分别为MN、PQ,间距为与PQ之间存在沿水平方向且大小始终为的匀强电场,当粒子通过MN进人电场中运动时,电场方向水平向右;当粒子通过PQ进人电场中运动时,电场方向水平向左。现有一质量为、电荷量为的粒子在纸面内以初速度从点垂直MN射人电场,一段时间后进人磁场II,之后又分别通过匀强电场和磁场 , 以速度回到点,磁场II的磁感应强度 , 不计粒子重力。则下列说法正确的是
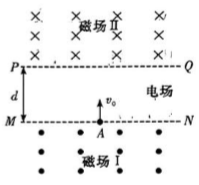 A、粒子在水平向右的电场中运动的位移大小为 B、粒子在磁场II中运动的速度大小 C、粒子在磁场II中做匀速圆周运动的弦长为 D、磁场I的磁感应强度大小
A、粒子在水平向右的电场中运动的位移大小为 B、粒子在磁场II中运动的速度大小 C、粒子在磁场II中做匀速圆周运动的弦长为 D、磁场I的磁感应强度大小 -
17、如图所示,竖直平面内固定一半径为的光滑圆环,圆心在点。质还分别为m、0.75m的A、B两小球套在圆环上,用不可伸长的长为的轻杆通过较链连接,开始时对球施加一个竖直向上的外力 , 使A、B均处于静止状态,且球恰好与圆心等高,重力加速度为 , 则下列说法正确的是
 A、对球施加的坚直向上的外力的大小为 B、若撤掉外力;对球施加一个水平向左的外力 , 使系统仍处于原来的静止状态,则的大小为mg C、撤掉外力,系统无初速度释放,当球到达最低点时,球的速度大小为 D、撤掉外力,系统无初速度释放,沿着圆环运动,球能够上升的最高点相对圆心点的坚直高度为
A、对球施加的坚直向上的外力的大小为 B、若撤掉外力;对球施加一个水平向左的外力 , 使系统仍处于原来的静止状态,则的大小为mg C、撤掉外力,系统无初速度释放,当球到达最低点时,球的速度大小为 D、撤掉外力,系统无初速度释放,沿着圆环运动,球能够上升的最高点相对圆心点的坚直高度为 -
18、2022年“互联网之光”博览会上,无人驾驶技术上线,无人驾驶汽车以其反应时间短而备受众多参会者的青睐。在同样测试条件下,对疲劳驾驶员和无人驾驶汽车进行反应时间的测试,从发现紧急情况到车静止,两测试车内所装的位移传感器记录的数据经简化后得到(1)(2)两线所示的位移随时间变化的关系图像,图中OA和OB段为直线,已知两测试车均由同一位置沿相同平直公路运动,且汽车紧急制动车轮抱死后做的是匀变速直线运动。下列说法正确的是( )
 A、图中的(1)此起无人驾陂汽本的位移与时间关系图像 B、国中的(2)起无人驾驶汽车的位移与时间关系图像 C、两测试车在图中曲线部分的位移大小不相筞 D、当发现紧急情况时两汽车的速度为
A、图中的(1)此起无人驾陂汽本的位移与时间关系图像 B、国中的(2)起无人驾驶汽车的位移与时间关系图像 C、两测试车在图中曲线部分的位移大小不相筞 D、当发现紧急情况时两汽车的速度为 -
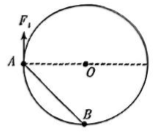
19、有人设想:可以在飞船从运行轨道进人返回地球程序时,借飞船需要减速的机会,发射一个小型太空探测器,从而达到节能的目的。如图所示,飞船在圆轨道上绕地球飞行,其轨道半径为地球半径的倍。当飞船通过轨道的点时,飞船上的发射装置短暂工作,将探测器沿飞船原运动方向射出,并使探测器恰能完全脱离地球的引力范围,即到达距地球无限远时的速度恰好为零,而飞船在发射探测器后沿椭圆轨道II向前运动,其近地点到地心的距离近似为地球半径。已知取无穷远处引力势能为零,物体距星球球心距离为时的引力势能。在飞船沿轨道I和轨道II以及探测器被射出后的运动过程中,其动能和引力势能之和均保持不变。以上过程中飞船和探测器的质量均可视为不变,已知地球表面的重力加速度为。则下列说法正确的是
 A、飞船在轨道I运动的速度大小为 B、飞船在轨道I上的运行周期是在轨道II上运行周期的倍 C、探测器刚离开飞船时的速度大小为 D、若飞船沿轨道II运动过程中,通过点与点的速度大小与这两点到地心的距离成反比,实现上述飞船和探测器的运动过程,飞船与探测器的质量之比应满足
A、飞船在轨道I运动的速度大小为 B、飞船在轨道I上的运行周期是在轨道II上运行周期的倍 C、探测器刚离开飞船时的速度大小为 D、若飞船沿轨道II运动过程中,通过点与点的速度大小与这两点到地心的距离成反比,实现上述飞船和探测器的运动过程,飞船与探测器的质量之比应满足 -
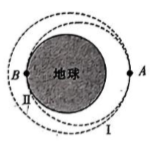
20、如图所示,矩形线圈切割磁感线产生一交流电压 , 矩形线圈的电阻 , 将其接在理想变压器原线圈上。标有“”的灯泡L正常发光,交流散热风扇正常工作,凤扇的内阻为 , 交流电流表(不考虑内阻)的示数为 , 导线电阻不计,不计灯泡电阻的变化,且。以下判断正确的是
 A、在图示时刻,穿过线圈磁通量变化最快 B、从图示位置开始,当矩形线圈转过时,线图中的电流方向为BADCB C、凤扇输出的机械功率是 D、原副线圈的匝数比
A、在图示时刻,穿过线圈磁通量变化最快 B、从图示位置开始,当矩形线圈转过时,线图中的电流方向为BADCB C、凤扇输出的机械功率是 D、原副线圈的匝数比