-
1、 在解答一道已知量完全由字母表达结果的计算题时,一个同学解得某物体位移的表达式如下,请你用单位制的知识判断,下面哪个结果可能正确( )A、 B、 C、 D、
-
2、 钢球由静止开始做自由落体运动,不计空气阻力,落地时的速度为30m/s,g取10m/s2 , 则钢球( )A、下落的时间为2s B、下落
 高度是45m
C、在前2s内的平均速度是15m/s
D、在最后1s内下落的高度是20m
高度是45m
C、在前2s内的平均速度是15m/s
D、在最后1s内下落的高度是20m
-
3、 下列对惯性、惯性定律(牛顿第一定律)的理解正确的是( )A、牛顿第一定律是通过实验得到验证了的定律 B、汽车转弯后运动方向发生了改变,其惯性也将随之改变 C、牛顿第一定律表明,物体只有在静止或做匀速直线运动时才具有惯性 D、一个质量小的皮球,你可以轻易踢走它,而一个质量大的铅球,你很难轻易踢开它,表明质量大的物体惯性大
-
4、如图所示,倾角的粗糙斜面下端有一水平传送带,传送带以的恒定速度顺时针方向运动。一个质量的滑块(可视为质点),从斜面上距底端A点处静止释放,滑块每次经过斜面与传送带连接处时速率不变。滑块与斜面间的动摩擦因数 , 滑块与传送带间的动摩擦因数 , 传送带两端A、B间的距离 , (已知)求:
 (1)、滑块第一次下滑到A处时速度的大小;(2)、滑块在传送带上向左运动离A点的最大距离;(3)、滑块离开传送带后,第一次滑上斜面离A点的最大距离。
(1)、滑块第一次下滑到A处时速度的大小;(2)、滑块在传送带上向左运动离A点的最大距离;(3)、滑块离开传送带后,第一次滑上斜面离A点的最大距离。 -
5、 如图所示,粗糙水平面上放一斜面,其上表面光滑,有一个质量的小球被轻弹簧拴住悬挂在天花板上,已知轻弹簧与竖直方向的夹角 , 斜面倾角 , 弹簧的劲度系数 , 整个装置处于静止状态。求:
 (1)、轻弹簧形变量;(2)、地面对斜面摩擦力的大小及方向;(3)、从左侧快速撤去斜面的瞬间,小球加速度的大小。
(1)、轻弹簧形变量;(2)、地面对斜面摩擦力的大小及方向;(3)、从左侧快速撤去斜面的瞬间,小球加速度的大小。 -
6、 近年来邵阳市争创文明城市,邵阳交警将“礼让行人”作为管理重点,斑马线前“车让人”现已成为一种普遍现象。如图某司机驾车以的速度在平直的城市道路上沿直线行驶,看到斑马线上有行人后,立即以大小为的加速度刹车,车停在斑马线前,经等待行人通过后再继续行驶。开始刹车时设为计时起点(即)。求:
 (1)、该车末的瞬时速度大小;(2)、该车前内的位移大小。
(1)、该车末的瞬时速度大小;(2)、该车前内的位移大小。 -
7、 某同学用如图甲所示的装置做“探究物体加速度与力的关系”的实验。实验时保持小车的质量不变,用槽码的重力作为小车受到的合外力,根据打点计时器在小车后端拖动的纸带上打出的点迹计算小车运动的加速度,重力加速度为g。
 (1)、实验时先不挂槽码,反复调整垫木的左右位置,直到小车做匀速直线运动,这样做的目的是;(2)、图乙为实验中打出的一条纸带的一部分,从比较清晰的点迹起,在纸带上标出了连续的5个计数点A、B、C、D、E,相邻两个计数点之间都有4个点迹没有标出,测出其它各计数点到A点的距离。已知打点计时器所接交流电源的频率为 , 则此次实验中小车运动的加速度测量值(结果保留两位有效数字)。若实验时电源实际频率比略大,则以上加速度测量值比真实值(填“偏大”、“偏小”或“不变”);(3)、实验时改变所挂槽码的质量,分别测量小车在不同外力作用下的加速度。根据测得的多组数据画出关系图像,如图丙所示,图线上部弯曲的原因是 , 图中等于。
(1)、实验时先不挂槽码,反复调整垫木的左右位置,直到小车做匀速直线运动,这样做的目的是;(2)、图乙为实验中打出的一条纸带的一部分,从比较清晰的点迹起,在纸带上标出了连续的5个计数点A、B、C、D、E,相邻两个计数点之间都有4个点迹没有标出,测出其它各计数点到A点的距离。已知打点计时器所接交流电源的频率为 , 则此次实验中小车运动的加速度测量值(结果保留两位有效数字)。若实验时电源实际频率比略大,则以上加速度测量值比真实值(填“偏大”、“偏小”或“不变”);(3)、实验时改变所挂槽码的质量,分别测量小车在不同外力作用下的加速度。根据测得的多组数据画出关系图像,如图丙所示,图线上部弯曲的原因是 , 图中等于。 -
8、 “验证力的平行四边形定则”的实验情况如图甲所示,其中A为固定橡皮筋的图钉,O为橡皮筋与细绳的结点,和为细绳。图乙是在白纸上根据实验结果画出的图。
 (1)、图乙中的F与两力中,方向一定沿方向的是;(2)、本实验采用的科学方法是____(填正确答案标号);A、理想实验法 B、等效替代法 C、控制变量法 D、建立物理模型法(3)、在图甲中,初始时 , 保持左边弹簧
(1)、图乙中的F与两力中,方向一定沿方向的是;(2)、本实验采用的科学方法是____(填正确答案标号);A、理想实验法 B、等效替代法 C、控制变量法 D、建立物理模型法(3)、在图甲中,初始时 , 保持左边弹簧 读数不变,当α角逐渐减小,要使结点仍在O点处,可采取的办法是____(填正确答案标号)。 A、增大右边弹簧秤的读数,减小角 B、减小右边弹簧秤的读数,减小角 C、减小右边弹簧秤的读数,增大角 D、增大右边弹簧秤的读数,增大角
读数不变,当α角逐渐减小,要使结点仍在O点处,可采取的办法是____(填正确答案标号)。 A、增大右边弹簧秤的读数,减小角 B、减小右边弹簧秤的读数,减小角 C、减小右边弹簧秤的读数,增大角 D、增大右边弹簧秤的读数,增大角 -
9、 如图所示,上端固定在天花板上的直杆与竖直方向的夹角 , 小球A套在杆上,小球B与A用细线连接,力F沿垂直细线的方向作用在B球上。初始时,两球都处于静止状态且细线与杆垂直。保持F方向始终与细线垂直,改变其大小,使小球B绕A顺时针缓慢转动 , A球始终保持静止,两球质量均为m,重力加速度为g。则下列说法正确的是( )
 A、初始位置,拉力F的大小为 B、缓慢移动过程中,F先变大后变小 C、缓慢移动过程中,细线的张力一直变小 D、缓慢移动过程中,A球所受摩擦力先变小后变大
A、初始位置,拉力F的大小为 B、缓慢移动过程中,F先变大后变小 C、缓慢移动过程中,细线的张力一直变小 D、缓慢移动过程中,A球所受摩擦力先变小后变大 -
10、 甲、乙两车某时刻由同一地点沿同一方向开始做直线运动,若以该时刻作为计时起点,得到两车的位移—时间图像如图所示,其中乙图线为抛物线。则下列说法正确的是( )
 A、时刻两车相距最远 B、时刻乙车从后面追上甲车 C、时刻两车的速度刚好相等 D、时间内,乙车的平均速度小于甲车的平均速度
A、时刻两车相距最远 B、时刻乙车从后面追上甲车 C、时刻两车的速度刚好相等 D、时间内,乙车的平均速度小于甲车的平均速度 -
11、 如图所示,在竖直向上恒力F的作用下,a物体紧靠竖直墙壁并保持静止,b物体沿a物体匀速下滑。则下列说法中正确的是( )
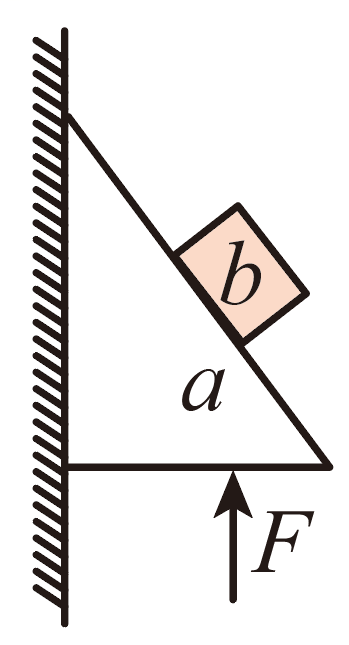 A、a、b之间一定存在摩擦力 B、a可能受到6个力的作用 C、b物体受到a物体的作用力竖直向上 D、墙壁不可能是光滑的
A、a、b之间一定存在摩擦力 B、a可能受到6个力的作用 C、b物体受到a物体的作用力竖直向上 D、墙壁不可能是光滑的 -
12、 伽利略对“自由落体运动”和“运动和力的关系”的研究,开创了科学实验和逻辑推理相结合的重要科学研究方法。图甲、图乙分别表示这两项研究中实验和逻辑推理的过程,对这两项研究,下列说法正确的是( )
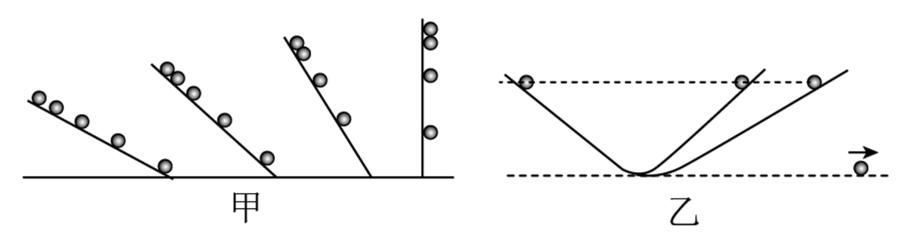 A、图甲中先在倾角较小的斜面上进行实验,可“冲淡”重力,使时间测量更容易 B、图甲通过对自由落体运动的研究,合理外推得出小球在斜面上做匀变速运动 C、图乙中完全没有摩擦阻力的斜面是实际存在的,实验可实际完成 D、图乙的实验虽为“理想实验”,无法实现,但伽利略在实验基础上进一步推理的方法,帮我们找到了解决运动和力关系问题的办法
A、图甲中先在倾角较小的斜面上进行实验,可“冲淡”重力,使时间测量更容易 B、图甲通过对自由落体运动的研究,合理外推得出小球在斜面上做匀变速运动 C、图乙中完全没有摩擦阻力的斜面是实际存在的,实验可实际完成 D、图乙的实验虽为“理想实验”,无法实现,但伽利略在实验基础上进一步推理的方法,帮我们找到了解决运动和力关系问题的办法 -
13、如图所示,A、B两个物体相互接触,但并不黏合,放置在光滑水平面上,两物体的质量 , 。从开始,推力和拉力分别作用于A、B上,、随时间变化规律分别为、。下列说法不正确的是( )
 A、物体A、B间的最大弹力为 B、时,物体A、B开始分离 C、时,物体A向右的速度达到最大值 D、物体A向右速度达最大时,物体B的加速度为
A、物体A、B间的最大弹力为 B、时,物体A、B开始分离 C、时,物体A向右的速度达到最大值 D、物体A向右速度达最大时,物体B的加速度为
-
14、 2023年11月15日第一届全国青年运动会在南宁市举行。如图甲所示,某运动员参加跳水比赛,在空中的运动近似为竖直上抛运动,从运动员离开跳板瞬间开始计时,取竖直向下为正方向,该运动员重心的竖直速度随时间变化的图像如图乙所示。下列说法正确的是( )
 A、在和时间内加速度方向相反 B、在时刻运动员重心到达最高点 C、在时刻运动员重心速度反向 D、在时刻运动员重心到达最低点
A、在和时间内加速度方向相反 B、在时刻运动员重心到达最高点 C、在时刻运动员重心速度反向 D、在时刻运动员重心到达最低点 -
15、如图所示,一物块受到一个水平力F作用静止于斜面上,此力F的方向与斜面平行,如果将力F撤除,下列对物块的描述正确的是( )
 A、物块将沿斜面下滑 B、物块受到的摩擦力变大 C、物块立即获得加速度 D、物块所受的摩擦力方向改变
A、物块将沿斜面下滑 B、物块受到的摩擦力变大 C、物块立即获得加速度 D、物块所受的摩擦力方向改变 -
16、 有一种玩具摆件叫平衡鹰,如图所示,用手指顶在鹰嘴的下面,它可以稳稳地停在指尖上而不掉落。下列说法正确的是( )
 A、平衡鹰的重心一定在鹰的腹部 B、手指由于被压要恢复原状,对鹰产生向上的支持力 C、鹰受的重力与手指对鹰的支持力是一对相互作用力 D、鹰对手指的压力与鹰的重力是一对平衡力
A、平衡鹰的重心一定在鹰的腹部 B、手指由于被压要恢复原状,对鹰产生向上的支持力 C、鹰受的重力与手指对鹰的支持力是一对相互作用力 D、鹰对手指的压力与鹰的重力是一对平衡力 -
17、 下列关于超重和失重现象的描述中正确的是( )A、电梯正在减速上升时,电梯中的乘客处于超重状态 B、磁悬浮列车在水平轨道上加速行驶时,列车上的乘客处于超重状态 C、小明逛商场,随感应扶梯加速下行时,小明处于失重状态 D、“天宫课堂”中,宇航员可以用天平直接测量物体的质量
-
18、 2023年12月26日15:00邵永高铁项目在邵阳、永州两地同时举行开工仪式。邵永铁路北起邵阳市,南至永州市,新建线路全长约96公里,建设工期4年,设计时速350公里/小时。以下说法中正确的是( )A、2023年12月26日15:00指的是时间间隔 B、线路全长约96公里指的是位移 C、时速350公里/小时指的是平均速度 D、估算某列动车从邵阳至永州行驶的时间,可将此动车视为质点
-
19、如图所示,竖直平面内的矩形区域内存在方向水平向左的匀强电场图中未画出 , 竖直。若使一质量为、电荷量为的带正电小球视为质点从上的点沿方向与的夹角射入电场,则小球做直线运动并恰好能到达点;若使该小球沿垂直于方向射入电场,则小球恰好从点射出电场。 , , 重力加速度大小为 , 取 , , 不计空气阻力。求:
 (1)、匀强电场的电场强度大小以及小球从点运动到点的时间;(2)、小球沿方向与垂直方向射入电场的初速度大小之比。
(1)、匀强电场的电场强度大小以及小球从点运动到点的时间;(2)、小球沿方向与垂直方向射入电场的初速度大小之比。 -
20、空间中存在水平向右的匀强电场,电场强度大小 , 一带电粒子从点移动到点时,电场力做功 , 平行于电场线且、间的距离为 , 之后粒子又从点移动到点,、间的距离为且与电场线方向的夹角为 , 求:
 (1)、粒子所带电荷量;(2)、粒子从点移动到点过程中电场力所做的功;(3)、、两点的电势差。
(1)、粒子所带电荷量;(2)、粒子从点移动到点过程中电场力所做的功;(3)、、两点的电势差。