相关试卷
- 广东省惠州市2017年高考物理一调试卷
- 广东省阳江市2016-2017学年高二下学期物理期末考试试卷
- 广东省佛山市高明一中2016-2017学年高一下学期物理期末模拟试卷
- 广东省珠海市2016-2017学年高二上学期物理期末考试试卷(b卷)
- 广东省惠州市2016-2017学年高二上学期物理期末考试试卷
- 浙江省嘉兴市2016-2017学年高三上学期物理期末考试试卷
- 辽宁省沈阳市2016-2017学年高三上学期物理期末考试试卷
- 江西省赣州市2016-2017学年高三上学期物理期末考试试卷
- 广东省清远市清城区2016-2017学年高三上学期物理期末考试试卷(b卷)
- 2016-2017学年广东省肇庆市高一上学期期末物理试卷
-
1、如图所示,在坐标系的第一象限内,有一段以坐标原点为圆心的四分之一圆弧ab,a点的坐标为(0,3),点的坐标为(3,0),ac段弧长是bc段弧长的2倍.空间有平行于坐标轴平面的匀强电场,a、c两点的电势均为1V,b点的电势为 , 则下列说法正确的是
 A、匀强电场的电场强度方向与轴正向成60°角 B、匀强电场的电场强度大小为 C、一个带正电的电荷沿圆弧从a运动到b,电势能先增大后减小 D、坐标原点O的电势为
A、匀强电场的电场强度方向与轴正向成60°角 B、匀强电场的电场强度大小为 C、一个带正电的电荷沿圆弧从a运动到b,电势能先增大后减小 D、坐标原点O的电势为 -
2、如图所示,光滑直杆倾斜固定在竖直面内,一个圆环套在杆上,环可以在杆上自由滑动,绕过定滑轮的细绳连接在环上,对绳施加拉力,使连接环部分的绳处于竖直状态,则下列说法正确的是
 A、拉绳的力的大小一定等于环的重力 B、改变对绳的拉力,使环沿杆缓慢向上运动,在运动过程中杆对环的作用力一定垂直杆向下 C、改变对绳的拉力,使环沿杆缓慢向上运动,在运动过程中,绳的拉力一直增大 D、改变对绳的拉力,使环沿杆缓慢向上运动,环可以运动到绳与杆垂直的位置
A、拉绳的力的大小一定等于环的重力 B、改变对绳的拉力,使环沿杆缓慢向上运动,在运动过程中杆对环的作用力一定垂直杆向下 C、改变对绳的拉力,使环沿杆缓慢向上运动,在运动过程中,绳的拉力一直增大 D、改变对绳的拉力,使环沿杆缓慢向上运动,环可以运动到绳与杆垂直的位置 -
3、下列说法正确的是A、原子核是否稳定,与原子核的结合能大小无关 B、放射性元素衰变快慢,与温度高低、压强大小无关 C、铀核()裂变一旦发生就能自动延续下去,与铀块体积大小无关 D、原子核只要发生衰变,产生的新核核子数一定减少,与它发生何种衰变无关
-
4、如图甲所示的变压器电路中,电压表为理想电表,变压器原、副线线圈的匝数比为3:1,a,b端输入稳定的交流电压如图乙所示,L1、L2两个灯泡均正常发光,电压表的示数为55V,则L1、L2两个灯泡的额定功率P1、P2之比为
 A、1:3 B、2:3 C、1:1 D、4:3
A、1:3 B、2:3 C、1:1 D、4:3 -
5、有人设想在地球赤道上架设一个天梯,在天梯上释放卫星后,卫星刚好能绕地球做匀速圆周运动,已知地球自转的角速度为 , 地球的半径为R,地球表面的重力加速度为g,则天梯的高度至少为A、 B、 C、 D、
-
6、将一段通电直导线abc从中点b折成 , 分别放在甲、乙所示的匀强磁场中,甲图中导线所在平面与磁场的磁感线平行,乙图中导线所在平面与磁场的磁感线垂直,若两图中两导线所受的安培力大小相等,则甲、乙两图中磁场的磁感应强度大小之比为
 A、 B、 C、 D、
A、 B、 C、 D、 -
7、一物块在水平地面上,以一定的初速度沿水平面滑动,直至速度为零,物块与水平面的动摩擦因数恒定,则关于物块运动的位移()、位移与时间比值()、速度()、加速度()随时间t变化的图像正确的是(设初速度的方向为正方向)A、
 B、
B、 C、
C、 D、
D、
-
8、将质量为1kg的物体以3m/s的速度水平抛出,当物体的速度为5m/s时,其重力的瞬时功率为( )A、20W B、30W C、40W D、50W
-
9、某实验小组为了验证小球所受向心力与角速度、半径的关系,设计了如图甲所示的实验装置,转轴由小电机带动,转速可调,固定在转轴上点的力传感器通过轻绳连接一质量为的小球,一根固定在转轴上的光滑水平直杆穿过小球,保证小球在水平面内转动,直杆最外边插一小遮光片 , 小球每转一周遮光片通过右边光电门时可记录遮光片最外边的挡光时间,某次实验操作如下:

(1)用螺旋测微器测量遮光片的宽度 , 测量结果如图乙所示,则。
(2)如图甲所示,安装好实验装置,用刻度尺测量遮光片最外端到转轴点的距离记为 , 测量小球球心到转轴点的距离记为。
(3)开动电动机,让小球转动起来,某次遮光片通过光电门时光电门计时为 , 则小球此时的角速度等于。(用字母中的部分字母表示)
(4)验证向心力与半径关系时,让电动机匀速转动,遮光片每次通过光电门的时间相同,调节小球球心到转轴点的距离的长度,测出每一个的长度以及其对应的力传感器的读数 , 得出多组数据,画出的关系图像应该为。

(5)验证向心力与角速度关系时让小球球心到转轴点距离不变,调节电动机转速,遮光片每次通过光电门的时间不同,记录某次挡光时间同时记录此时力传感器的读数 , 得出多组与的数据,为了准确验证小球所受向心力与角速度的关系,利用实验测量量应画(选填“”“”“”或“”)关系图。
-
10、由半导体材料制成的热敏电阻阻值是温度的函数。基于热敏电阻对温度敏感原理制作一个火灾报警系统,要求热敏电阻温度升高至时,系统开始自动报警。所用器材有:
直流电源( , 内阻不计) 电流表(量程 , 内阻约)
电压表(量程 , 内阻约为) 热敏电阻
滑动变阻器(最大阻值) 电阻箱(最大阻值)
报警器(内阻很小,流过的电流超过时就会报警)
单刀单掷开关、单刀双掷开关、导线若干。
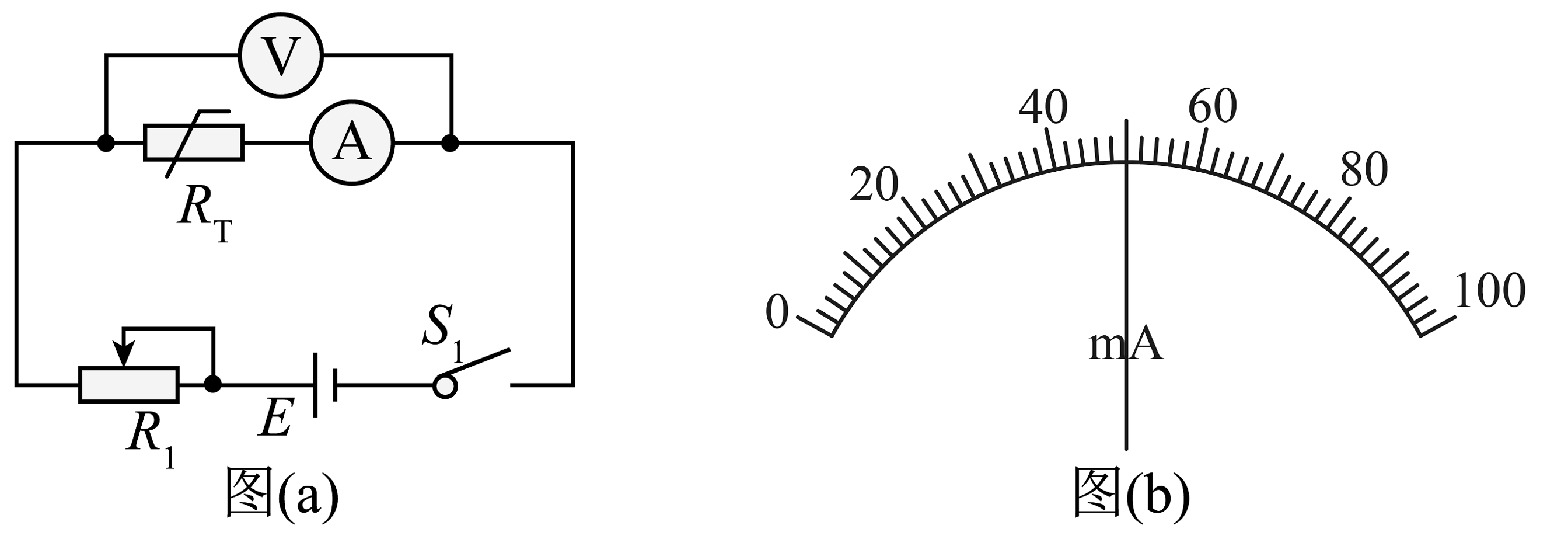
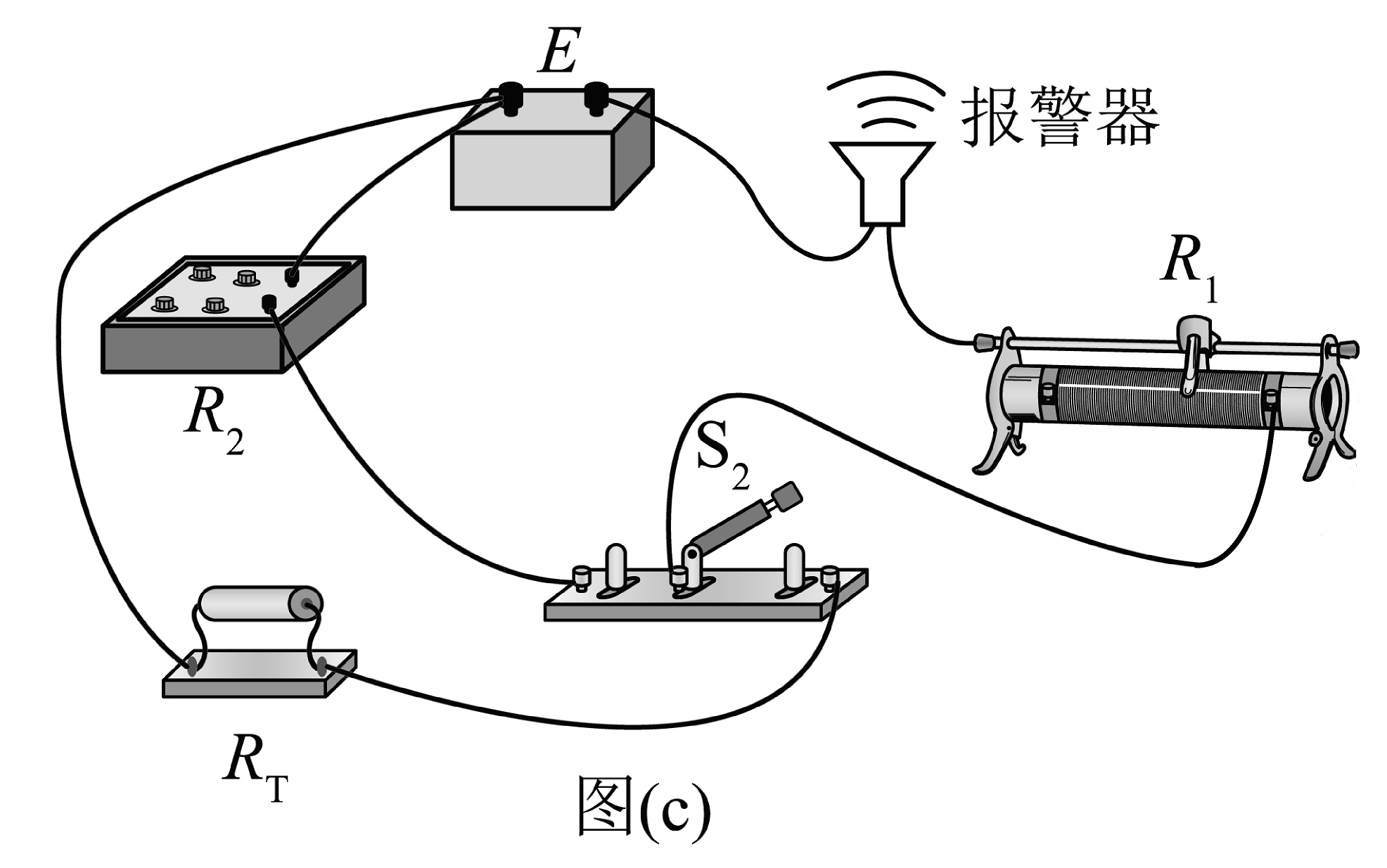 (1)、用图(a)所示电路测量热敏电阻的阻值。当温度为时,电压表读数为 , 电流表读数为;当温度为时,调节 , 使电压表读数仍为 , 电流表指针位置如图(b)所示。温度为时,热敏电阻的阻值为(保留三位有效数字)。从实验原理上看,该方法测得的阻值比真实值略微(填“偏大”或“偏小”);(2)、如果热敏电阻阻值随温度升高而变大,则其为正温度系数热敏电阻,反之为负温度系数热敏电阻。基于以上实验数据可知,该热敏电阻为(填“正”或“负”)温度系数热敏电阻;(3)、某同学搭建一套基于该热敏电阻的火灾报警系统,实物图连线如图(c)所示,正确连接后,先使用电阻箱进行调试,其阻值设置为 , 滑动变阻器阻值从最大逐渐减小,直至报警器开始报警,此时滑动变阻器连入电路的阻值为。调试完毕后,再利用单刀双掷开关的选择性开关功能,把热敏电阻接入电路,可方便实现调试系统和工作系统的切换。(结果均保留到个位)
(1)、用图(a)所示电路测量热敏电阻的阻值。当温度为时,电压表读数为 , 电流表读数为;当温度为时,调节 , 使电压表读数仍为 , 电流表指针位置如图(b)所示。温度为时,热敏电阻的阻值为(保留三位有效数字)。从实验原理上看,该方法测得的阻值比真实值略微(填“偏大”或“偏小”);(2)、如果热敏电阻阻值随温度升高而变大,则其为正温度系数热敏电阻,反之为负温度系数热敏电阻。基于以上实验数据可知,该热敏电阻为(填“正”或“负”)温度系数热敏电阻;(3)、某同学搭建一套基于该热敏电阻的火灾报警系统,实物图连线如图(c)所示,正确连接后,先使用电阻箱进行调试,其阻值设置为 , 滑动变阻器阻值从最大逐渐减小,直至报警器开始报警,此时滑动变阻器连入电路的阻值为。调试完毕后,再利用单刀双掷开关的选择性开关功能,把热敏电阻接入电路,可方便实现调试系统和工作系统的切换。(结果均保留到个位) -
11、在光滑的水平导轨MN上固定一弹射装置,弹簧处于原长状态,如图所示。导轨MN右端N处与水平传送带理想连接,传送带右端Q处与光滑的半圆轨道理想连接,传送带长 , 以速率沿顺时针方向转动。质量为的滑块置于水平导轨上(滑块可视为质点),现将滑块向左移动压缩弹簧由静止释放,滑块脱离弹簧后以速度滑上传送带,并恰好通过半圆轨道。已知滑块与传送带之间的动摩擦因数 , 。求:
(1)滑块释放瞬间,弹簧具有的弹性势能;
(2)滑块从N点运动到Q点过程中,摩擦力对滑块做的功;
(3)半圆轨道的半径。

-
12、如图所示为一电场等势面的分布情况。虚线为一带电粒子仅在电场力作用下的运动轨迹,A、B为轨迹上的两点,则( )
 A、带电粒子带正电 B、带电粒子在A点的加速度小于B点的加速度 C、带电粒子在A点的电势能小于B点的电势能 D、若带电粒子由A点静止释放,仅在电场力作用下将沿等势面d运动
A、带电粒子带正电 B、带电粒子在A点的加速度小于B点的加速度 C、带电粒子在A点的电势能小于B点的电势能 D、若带电粒子由A点静止释放,仅在电场力作用下将沿等势面d运动 -
13、如图所示,质量为m1的球1与质量为m2的球2放置在“J2130向心力演示仪”上。该演示仪可以巧妙地将向心力转化为竖直方向的效果进行显示,左边立柱可显示球1所受的向心力F1的大小,右边立柱可显示球2所受的向心力F2的大小。皮带与轮A、轮B有多种组合方式,图示为其中的一种组合,此时连接皮带的两轮半径。图中两球距离立柱转轴中心的距离 , 下列说法正确的是( )
 A、若 , 转动手柄,则立柱上应显示 B、若 , 仅将球1改放在N位置,转动手柄,则立柱上应显示 C、若 , 仅调整皮带位置使 , 则立柱上应显示 D、若 , 既调整皮带位置使 , 又将球1改放在N位置,则立柱上应显示
A、若 , 转动手柄,则立柱上应显示 B、若 , 仅将球1改放在N位置,转动手柄,则立柱上应显示 C、若 , 仅调整皮带位置使 , 则立柱上应显示 D、若 , 既调整皮带位置使 , 又将球1改放在N位置,则立柱上应显示 -
14、如图,一演员表演飞刀绝技,由O点先后抛出完全相同的三把飞刀,分别垂直打在竖直木板上M、N、P三点.假设不考虑飞刀的转动,并可将其看做质点,已知O、M、N、P四点距离水平地面高度分别为h、4h、3h、2h,以下说法正确的是( )
 A、三把刀在击中板时动能相同 B、三次飞行时间之比为 C、三次初速度的竖直分量之比为3:2:1 D、设三次抛出飞刀的初速度与水平方向夹角分别为θ1、θ2、θ3 , 则有θ1>θ2>θ3
A、三把刀在击中板时动能相同 B、三次飞行时间之比为 C、三次初速度的竖直分量之比为3:2:1 D、设三次抛出飞刀的初速度与水平方向夹角分别为θ1、θ2、θ3 , 则有θ1>θ2>θ3 -
15、如图,水平轨道AB与半径为R的竖直半圆弧轨道BCD在B点平滑连接,整个装置处于与水平方向成45°角斜向上的匀强电场中,场强大小。质量为m,电荷量为q的带正电小球从水平轨道上某点(图中未画出)静止释放后以水平速度经B点进入圆弧轨道。不计一切摩擦阻力,重力加速度大小为g。求:
(1)小球运动到圆弧轨道上B点时所受轨道支持力的大小;
(2)小球从D点离开圆弧轨道到第一次返回轨道所经历的时间;
(3)整个运动过程中小球电势能最大的位置离B点的距离。

-
16、如图,密闭性能良好的杯盖扣在盛有少量热水的杯身上,杯盖的质量为m,杯身与热水的总质量为M,杯子的横截面积为S。初始时杯内气体的温度为T0 , 压强与大气压强p0相等。因杯子不保温,杯内气体温度将逐步降低,不计摩擦,不考虑杯内水的汽化和液化。
(1)求温度降为T1时杯内气体的压强p1;
(2)杯身保持静止,温度为T1时提起杯盖所需的力至少多大?
(3)温度为多少时,用上述方法提杯盖恰能将整个杯子提起?

-
17、小明想用实验室的器材设计一个测力计,可供选择的器材如下:
A.两节完全相同的干电池(电动势E、内阻r均未知);
B.电流表A1(量程为0~3mA,内阻为);
C.电流表A2(量程为0~0.6A,内阻为);
D.电压表V1(量程为0~3V,内阻未知);
E.电压表V2(量程为0~15V,内阻未知);
F.滑动变阻器R1(0~10Ω,允许通过的最大电流为2A);
G.滑动变阻器R2(0~100Ω,允许通过的最大电流为1A);
H.电阻箱R(0~999.9Ω);
I.压敏电阻Rx , 其阻值Rx随所加压力大小F变化的Rx-F图像如图丙所示;
J.开关S及导线若干。
 (1)、测量一节干电池的电动势和内阻,为使测量结果尽可能准确,本实验采用如图甲所示的电路,滑动变阻器应选(填“F”或“G”)。(2)、根据实验中电压表和电流表的示数得到了如图乙所示的U-I图像,则该干电池的电动势为E=V,内阻为r=Ω。(3)、将压敏电阻Rx设计成量程为0~100N的测力计,需将压敏电阻Rx与上述两节干电池、电流表A1、电阻箱R串联成如图丁所示的电路。闭合开关S,为使压敏电阻Rx所受压力大小为100N时电流表A1指针满偏,电阻箱接入电路的阻值为R=Ω,通过电流表A1的电流I随压力大小F变化的函数关系式为I=A(电阻箱接入电路的阻值R保持不变)。
(1)、测量一节干电池的电动势和内阻,为使测量结果尽可能准确,本实验采用如图甲所示的电路,滑动变阻器应选(填“F”或“G”)。(2)、根据实验中电压表和电流表的示数得到了如图乙所示的U-I图像,则该干电池的电动势为E=V,内阻为r=Ω。(3)、将压敏电阻Rx设计成量程为0~100N的测力计,需将压敏电阻Rx与上述两节干电池、电流表A1、电阻箱R串联成如图丁所示的电路。闭合开关S,为使压敏电阻Rx所受压力大小为100N时电流表A1指针满偏,电阻箱接入电路的阻值为R=Ω,通过电流表A1的电流I随压力大小F变化的函数关系式为I=A(电阻箱接入电路的阻值R保持不变)。 -
18、如图1所示,在“用双缝干涉测光的波长”实验中,将实验仪器按要求安装在光具座上,并选用缝间距的双缝屏。从仪器注明的规格可知,像屏与双缝屏间的距离。然后,接通电源使光源正常工作。

(1)“用双缝干涉测量光的波长”实验装置如图1所示,光具座上a、b、c处放置的光学元件依次为(选填选项前字母)。
A.滤光片 双缝 单缝 B.滤光片 单缝 双缝
C.单缝 滤光片 双缝 D.双缝 滤光片 单缝
(2)已知测量头上主尺的最小刻度是毫米,副尺(游标尺)上有20分度。某同学调整手轮后,从测量头的目镜看去,使分划板中心刻度线与某条纹A中心对齐,如图2所示,此时测量头上主尺和副尺的示数情况如图3所示,此示数为;接着再转动手轮,使分划板中心刻度线与某条纹B中心对齐,测得A到B条纹间的距离为。利用上述测量结果,经计算可得经滤光片射向双缝的色光的波长m(保留2位有效数字)。
(3)另一同学按实验装置安装好仪器后,观察到光的干涉现象效果很好。若他对实验装置作了一下改动后,在像屏上仍能观察到清晰的条纹,且条纹数目有所增加。以下改动可能实现这个效果的是(选填选项前字母)。
A.仅将滤光片移至单缝和双缝之间 B.仅将单缝远离双缝移动少许
C.仅将单缝与双缝的位置互换 D.仅将红色滤光片换成绿色的滤光片
-
19、高压输电可大大节能,至2017年11月,我国已建成投运8项1000kV特高压交流工程和11项kV特高压直流工程.中国全面掌握了特高压核心技术,成为世界首个也是唯一成功掌握并实际应用特高压技术的国家.某小型水电站的电能输送示意图如图甲所示,发电机输出的电压恒定,通过升压变压器和降压变压器向用户供电,已知输电线的总电阻为 , 降压变压器的原、副线圈匝数之比为4:1,它的副线圈两端的交变电压如图乙所示,若将变压器视为理想变压器,则下列说法中正确的是
 A、降压变压器原线圈的输入电压为880V B、降压变压器的输入功率与输出功率之比为4:1 C、当用户端用电量增大时,输电线上损耗的功率减小 D、当用户端用电量增大时,发电厂输出的功率也增大
A、降压变压器原线圈的输入电压为880V B、降压变压器的输入功率与输出功率之比为4:1 C、当用户端用电量增大时,输电线上损耗的功率减小 D、当用户端用电量增大时,发电厂输出的功率也增大 -
20、如图所示,直角三角形内(包括边界)存在垂直纸面向里的匀强磁场,磁感应强度大小为B。已知 , O为中点。两个带异种电荷的粒子从O点以相同的速度沿垂直方向射入磁场,向左偏转的粒子恰好没有从边射出磁场,向右偏转的粒子恰好从B点射出磁场,忽略粒子的重力和粒子间的相互作用,则正,负粒子的比荷之比为( )
 A、 B、2:1 C、3:1 D、
A、 B、2:1 C、3:1 D、