相关试卷
-
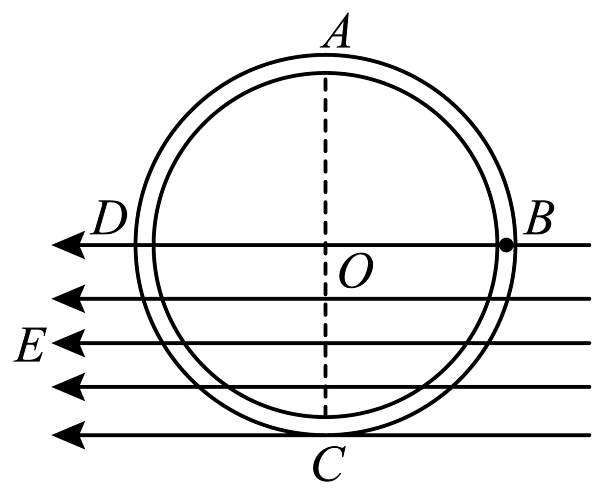
1、如图所示,半径R=35cm的环形塑料管竖直放置,管的内壁光滑且管的内径远小于环的半径。AC为该环的竖直直径,BD为该环的水平直径,在直径BD及其以下部分有方向水平向左,场强大小E=5 N/C的匀强电场。当将一质量m=0.4kg,电荷q=+0.8 C的小球从管中B点由静止开始释放,g取10 m/s2 , 求:
(1)小球第一次经过C点和A点时对管壁的压力大小之比;
(2) 小球第二次和第一次经过A点时对管壁的压力大小之比。
-
2、小明妈妈新购买了一只苏泊尔SWJ-50型电热水壶,其铭牌如图所示。小明在一个标准气压下,发现将一满壶初温为20 ℃的水在电热水壶正常工作时恰好烧开的时间为5 min。[已知c水=4.2×103J/(kg•℃),电热水壶发热电阻丝的电阻不变]
(1)求水吸收的热量;
(2)求消耗的电能;
(3)小明发现在用电高峰时,同样烧开一满壶初温为20 ℃的水需要的时间是363 s,求电热水壶两端的实际电压。(设电热水壶的加热效率相同)
型号
WSJ﹣50
额定电压
220 V
额定功率
800 W
水壶容积
500 mL

-
3、如图所示,为电动机提升重物的装置,电动机线圈电阻为r=1Ω,电动机两端电压为5V,电路中的电流为1A,物体A重20N,不计摩擦力,求:

(1)电动机线圈电阻上消耗的热功率是多少?
(2)电动机输入功率和输出功率各是多少?
(3)这台电动机的机械效率是多少?
-
4、用游标卡尺测量某物体的厚度时,示数如图所示,此示数为mm.

-
5、研究与平行板电容器电容有关因素时,用一平行板电容器与一静电计连接,平行板电容器b板和静电计外壳接地,实验装置如图所示,下列说法正确的是( )
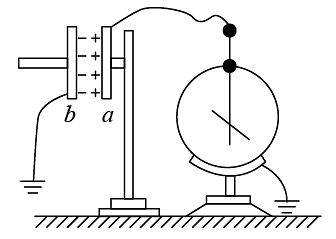 A、实验时,静电计的指针偏转角度大小反应两平行板电容器间的电势差大小 B、实验中,只将电容器b板向上平移,静电计指针的张角变小 C、实验中,只在极板间插入有机玻璃板,静电计指针的张角变小 D、实验中,只增加极板带电量,静电计指针的张角变大,表明电容增大
A、实验时,静电计的指针偏转角度大小反应两平行板电容器间的电势差大小 B、实验中,只将电容器b板向上平移,静电计指针的张角变小 C、实验中,只在极板间插入有机玻璃板,静电计指针的张角变小 D、实验中,只增加极板带电量,静电计指针的张角变大,表明电容增大 -
6、在某次创新实验大赛中,一实验小组需要使用量程为(0~3A)的电流表和量程为(0~15V)的电压表。主办方仅给提供一只毫安表(内阻Rg=99Ω,满偏电流Ig=6mA),定值电阻R1=1Ω,以及0~9999.9Ω的变阻箱R2。该实验小组根据实验器材设计的电路如图所示,则( )
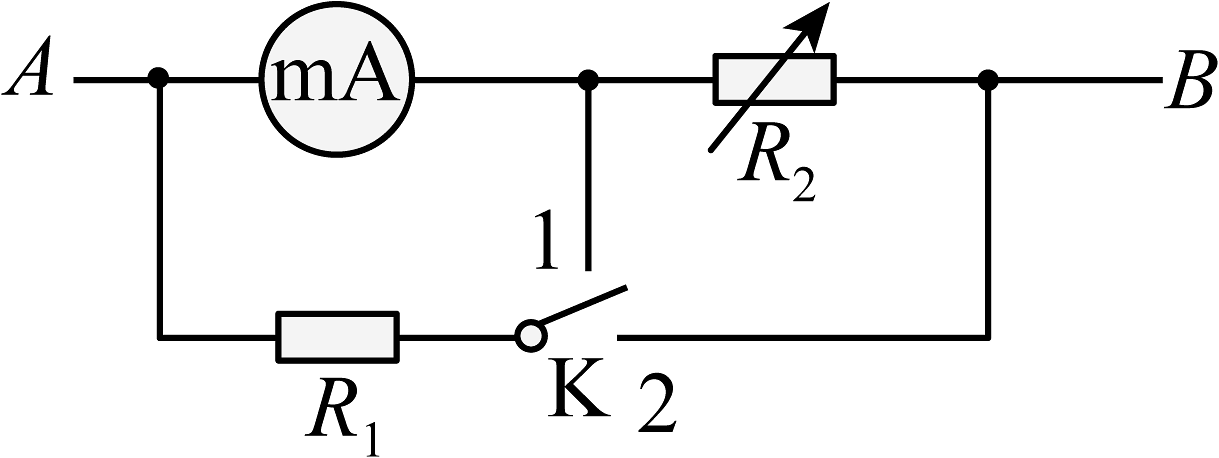 A、电键K掷于1时,可改装成量程为0 ~3A的电流表,此时R2=40Ω B、电键K掷于1时,可改装成量程为0~15V的电压表,此时R2=2401Ω C、电键K掷于2时,可改装成量程为0 ~3A的电流表,此时R2=400Ω D、电键K掷于2时,可改装成量程为0~15V的电压表,此时R2 =24Ω
A、电键K掷于1时,可改装成量程为0 ~3A的电流表,此时R2=40Ω B、电键K掷于1时,可改装成量程为0~15V的电压表,此时R2=2401Ω C、电键K掷于2时,可改装成量程为0 ~3A的电流表,此时R2=400Ω D、电键K掷于2时,可改装成量程为0~15V的电压表,此时R2 =24Ω -
7、欧姆调零后,用“×10”挡测量一个电阻的阻值,发现表针偏转角度极小,正确的判断和做法是( )A、为了测量得更准确,应直接用“×10”挡测量 B、为了测量得更准确,应换挡重新测量,但不需要重新进行欧姆调零 C、为了把电阻值测得更准一些,应换用“× 1”挡重新测量 D、为了把电阻值测得更准一些,应换用“× 100”挡重新测量
-
8、机器人(Robot)是一种能够半自主或全自主工作的智能机器,可以服务人类生活。如图甲所示,某款波士顿动力黄狗机器人的直流电动机的额定电压为U,额定电流为I,线圈电阻为R,将它接在电动势为E,内阻未知的直流电源两端时,电动机恰好能正常工作,内部电路如图乙所示,下列说法中正确的是( )
 A、电源的内阻为 B、电动机的输出功率为UI C、电动机消耗的总功率为EI D、电源的输出功率为EI-I2R
A、电源的内阻为 B、电动机的输出功率为UI C、电动机消耗的总功率为EI D、电源的输出功率为EI-I2R -
9、测定电源的电动势和内阻”的实验中,下列注意事项中错误的是( )A、应选用旧的干电池作为被测电源,以使电压表示数的变化比较明显 B、应选用内阻较小的电压表和电流表 C、移动变阻器的触头时,不能使滑动变阻器短路造成电流表过载 D、根据实验记录的数据作U–I图象时,应通过尽可能多的点画一条直线,并使不在直线上的点大致均匀分布在直线两侧
-
10、如图所示,水平地面上一物体重为11N,在大小为15N的推力F作用下做匀速运动,F与水平方向的夹角为θ。(sinθ=0.6,cosθ=0.8)求:
(1)地面对物体的摩擦力大小;
(2)地面对物体的支持力大小。
(3)物体与地面间的动摩擦因数μ。

-
11、汽车以10m/s的速度在平直公路上匀速行驶,刹车2s后速度变为6m/s。求:
 (1)、汽车刹车过程中的加速度大小;(2)、刹车后2s内汽车的位移;(3)、刹车后6s内汽车的位移。
(1)、汽车刹车过程中的加速度大小;(2)、刹车后2s内汽车的位移;(3)、刹车后6s内汽车的位移。 -
12、打点计时器是高中物理实验中常用的实验器材。某同学利用乙图装置去研究自由落体运动,并测量当地重力加速度。图丙为实验截取的一部分纸带,请你完成下列有关问题。
 (1)、实验用的打点计时器如图甲所示,它是(选填“电火花”或“电磁”)打点计时器;其正常工作电源为V的(选填“交流”或“直流”)电源。(2)、为了减小误差,实验中所用的重物应选(选填“小铁块”或“轻木块”)。在实验操作时,应先 , 再(选填“释放纸带”或“接通电源”)。(3)、丙图是实验得到的一条纸带上的选取的某一段,已知打点计时器的工作频率为50Hz,相邻两个计数点之间还有4个点未画出,则相邻两计数点之间的时间间隔为 , 打下C点时重物的瞬时速度vC=m/s;测得重力加速度的大小g=m/s2。(结果均保留三位有效数字)(4)、若实验操作与数据处理均无错误,但测出的重力加速度总比实际值偏小,其原因是:。
(1)、实验用的打点计时器如图甲所示,它是(选填“电火花”或“电磁”)打点计时器;其正常工作电源为V的(选填“交流”或“直流”)电源。(2)、为了减小误差,实验中所用的重物应选(选填“小铁块”或“轻木块”)。在实验操作时,应先 , 再(选填“释放纸带”或“接通电源”)。(3)、丙图是实验得到的一条纸带上的选取的某一段,已知打点计时器的工作频率为50Hz,相邻两个计数点之间还有4个点未画出,则相邻两计数点之间的时间间隔为 , 打下C点时重物的瞬时速度vC=m/s;测得重力加速度的大小g=m/s2。(结果均保留三位有效数字)(4)、若实验操作与数据处理均无错误,但测出的重力加速度总比实际值偏小,其原因是:。 -
13、有两个共点力,F1= 2N,F2= 4N,它们的合力F的大小可能是( )A、1N B、7N C、5N D、9N
-
14、如图所示,一只小鸟落在了树枝上,树枝发生了弯曲,小鸟处于静止状态,下列说法正确的是( )
 A、树枝发生了弯曲,是因为小鸟对树枝的压力大于树枝对小鸟的支持力 B、小鸟起飞瞬间,翅膀对空气的作用力大于空气对翅膀的作用力 C、树枝对小鸟弹力的方向斜向上偏右 D、树枝对小鸟的支持力是由树枝发生形变产生的
A、树枝发生了弯曲,是因为小鸟对树枝的压力大于树枝对小鸟的支持力 B、小鸟起飞瞬间,翅膀对空气的作用力大于空气对翅膀的作用力 C、树枝对小鸟弹力的方向斜向上偏右 D、树枝对小鸟的支持力是由树枝发生形变产生的 -
15、一根轻绳的上端悬挂在天花板上,下端挂一个灯泡,则( )A、灯泡受的重力和灯泡对绳的拉力是一对平衡力 B、灯泡受的重力和绳对灯泡的拉力是一对作用力和反作用力 C、灯泡对绳的拉力和绳对灯泡的拉力是一对作用力和反作用力 D、绳对天花板的拉力和天花板对绳的拉力是一对平衡力
-
16、如图所示用手握住玻璃瓶,下列对瓶子所受摩擦力描述正确的是( )
 A、水平匀速移动瓶子,摩擦力为零 B、匀速向上移动瓶子,摩擦力向下 C、保持瓶子静止,手握的越紧,摩擦力越大 D、保持瓶子静止,无论手握的力多大,摩擦力都不变
A、水平匀速移动瓶子,摩擦力为零 B、匀速向上移动瓶子,摩擦力向下 C、保持瓶子静止,手握的越紧,摩擦力越大 D、保持瓶子静止,无论手握的力多大,摩擦力都不变 -
17、小明在立定跳远时,下列关于他在脚蹬地起跳前瞬间的受力示意图,正确的是( )A、
 B、
B、 C、
C、 D、
D、
-
18、如图所示,锻炼身体用的拉力器,并列装有四根相同的弹簧,每根弹簧的自然长度都是40cm,某人用300N的力把它们拉长至1m,则( )
 A、每根弹簧产生的弹力为300N B、人的每只手受到的拉力为150N C、每根弹簧的劲度系数为125N/m D、每根弹簧的劲度系数为500N/m
A、每根弹簧产生的弹力为300N B、人的每只手受到的拉力为150N C、每根弹簧的劲度系数为125N/m D、每根弹簧的劲度系数为500N/m -
19、汽车停在水平路面上,下列说法正确的是( )
 A、路面很硬,所以路面没有发生形变 B、路面受的压力是因为汽车所受的重力作用在了路面上 C、汽车所受地面的支持力是汽车发生形变产生的 D、汽车所受地面的支持力是路面发生形变产生的
A、路面很硬,所以路面没有发生形变 B、路面受的压力是因为汽车所受的重力作用在了路面上 C、汽车所受地面的支持力是汽车发生形变产生的 D、汽车所受地面的支持力是路面发生形变产生的 -
20、如图所示,茶杯内装有茶水,随着茶水饮用完毕这一过程,杯和水的共同重心将( )
 A、一直下降 B、一直上升 C、先升后降 D、先降后升
A、一直下降 B、一直上升 C、先升后降 D、先降后升