相关试卷
- 四川省自贡市2017年高考物理三诊试卷
- 四川省绵阳市三台中学2017-2018学年高二上学期物理开学考试试卷
- 四川省遂宁市2016-2017学年高一上学期物理期末考试试卷
- 四川省南充中学2016-2017学年高一上学期物理期末考试试卷
- 四川省广安市邻水县2016-2017学年高一上学期物理期末考试试卷
- 四川省成都市武侯区2016-2017学年高一上学期物理期末考试试卷
- 四川省南充市2017年高考物理一诊试卷
- 辽宁省锦州市2017年高考物理二模试卷
- 辽宁省大连市金州区得胜高中2016-2017学年高二下学期物理期末考试试卷(选修3-4、选修3-5)
- 辽宁省六校协作体2016-2017学年高一上学期物理期中考试试卷
-
1、小明将一石块从井口静止释放,经过1s小明听见了石块落水的声音,取 , 在忽略空气阻力和声音在空气中传播的时间后,小明得到了井口到水面的距离,则( )A、石块落水的速度约为 B、井口到水面的距离约为10m C、若考虑空气阻力,则小明求得的距离偏小 D、若考虑声音在空气中传播的时间,则小明求得的距离偏大
-
2、如图为修正带的内部结构,由大小两个相互咬合的齿轮组成,修正带芯固定在大齿轮的转轴上。当按压并拖动其头部时,齿轮转动,从而将遮盖物质均匀地涂抹在需要修改的字迹上。若图中大小齿轮的半径之比为2∶1,A、B分别为大齿轮和小齿轮边缘上的一点,C为大齿轮上转轴半径的中点,则( )
 A、A与B的角速度大小之比为1∶2 B、B与C的线速度大小之比为1∶1 C、A与C的向心加速度大小之比为4∶1 D、大小齿轮的转动方向相同
A、A与B的角速度大小之比为1∶2 B、B与C的线速度大小之比为1∶1 C、A与C的向心加速度大小之比为4∶1 D、大小齿轮的转动方向相同 -
3、如图所示,一架直梯斜靠在光滑的竖直墙壁上,下端处于粗糙的水平地面上,此时直梯和竖直墙的夹角为 , 直梯处于静止状态。则下列说法正确的是( )
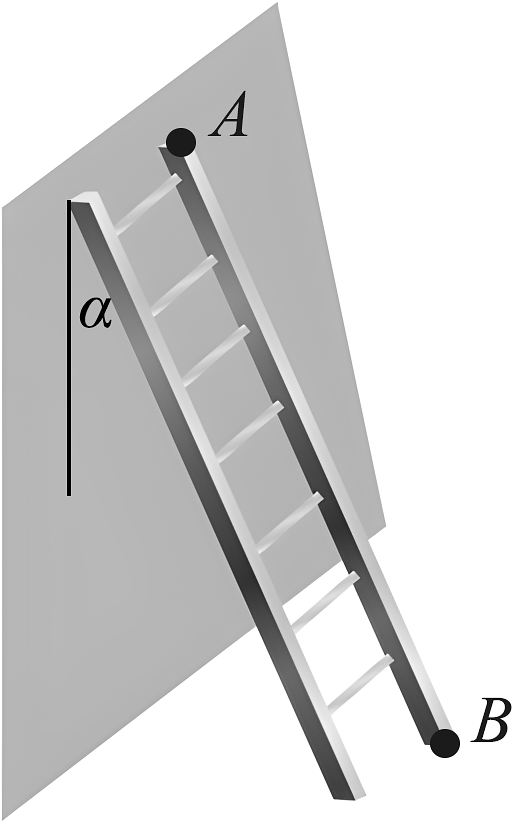 A、直梯受5个力作用 B、地面对直梯的支持力沿图中BA方向 C、若角增大,直梯仍能静止,则地面对梯子的支持力增大 D、若角增大,直梯仍能静止,则地面对梯子的摩擦力增大
A、直梯受5个力作用 B、地面对直梯的支持力沿图中BA方向 C、若角增大,直梯仍能静止,则地面对梯子的支持力增大 D、若角增大,直梯仍能静止,则地面对梯子的摩擦力增大 -
4、在法国奥运会乒乓球女单决赛中,陈梦以4-2的战绩战胜队友夺得金牌。下列说法正确的是( )
 A、击球时,乒乓球受到弹力是因为球拍发生了形变 B、击球时,球拍对乒乓球的作用力大于乒乓球对球拍的作用力 C、增大击球时的力度可以使乒乓球获得更大的惯性 D、击球后,乒乓球在空中运动时受到重力、推力和阻力作用
A、击球时,乒乓球受到弹力是因为球拍发生了形变 B、击球时,球拍对乒乓球的作用力大于乒乓球对球拍的作用力 C、增大击球时的力度可以使乒乓球获得更大的惯性 D、击球后,乒乓球在空中运动时受到重力、推力和阻力作用 -
5、2024年11月12日,第十五届中国国际航空航天博览会在珠海国际航展中心隆重举行,航展首日,中型隐身多用途战斗机歼-35A惊喜亮相,在珠海金湾机场上空进行了首次飞行表演,歼-35A采用了先进的飞行控制系统和高推重比发动机,其最大飞行速度可达2.2马赫(音速的2.2倍),总载弹量超过8吨,最大航程为3000km。下列说法正确的是( )
 A、2.2马赫指歼-35A的平均速度 B、研究歼-35A的翻转过程可以将其视为质点 C、3000km指的是歼-35A飞行的位移大小 D、歼-35A在减速上升时驾驶员处于失重状态
A、2.2马赫指歼-35A的平均速度 B、研究歼-35A的翻转过程可以将其视为质点 C、3000km指的是歼-35A飞行的位移大小 D、歼-35A在减速上升时驾驶员处于失重状态 -
6、下列物理量都属于矢量的是( )A、位移、速率 B、速度、加速度 C、路程、向心力 D、线速度、时刻
-
7、如图所示,一轻绳连着一小球,悬挂于O点,现给小球一个初速度释放做竖直圆周运动。设小球质量 , 绳长 , 小球运动的最低点离地高度。
 (1)、若小球通过最高点的速度大小为 , 求此时小球对绳的拉力;(2)、若轻绳能够承受的最大拉力为105N,求允许小球通过最低点的最大速率;(3)、若以(2)问的最大速率通过最低点时,轻绳恰好断裂,求小球平抛的水平位移x大小。
(1)、若小球通过最高点的速度大小为 , 求此时小球对绳的拉力;(2)、若轻绳能够承受的最大拉力为105N,求允许小球通过最低点的最大速率;(3)、若以(2)问的最大速率通过最低点时,轻绳恰好断裂,求小球平抛的水平位移x大小。 -
8、冲关节目是一种户外娱乐健康游戏,如图所示为参赛者遇到的一个关卡。一个半径为R的圆盘浮在水面上,圆盘表面保持水平且与水平跑道的高度差 , M为圆盘边缘上一点。某时刻,参赛者从跑道上P点水平向右跳出,初速度的方向与圆盘半径在同一竖直平面内。已知圆盘的圆心与P点之间的水平距离为 , 圆盘半径 , 重力加速度g取 , 不计空气阻力.
(1)求参赛者从P点跳出至落至圆盘经历的时间t;
(2)参赛者要能落在圆盘上,求v0的最小值;
(3)若参赛者从P点跳出的同时,圆盘绕过其圆心O的竖直轴以角速度ω匀速转动,要使参赛者落到M点,求圆盘转动的角速度ω.

-
9、在“探究向心力大小的表达式”实验中,所用向心力演示器如图所示。图是演示器部分原理示意图:皮带轮①、④的半径相同,轮②的半径是轮①的1.5倍,轮③的半径是轮①的2倍,轮④的半径是轮⑤的1.5倍,轮④的半径是轮⑥的2倍;两转臂上黑白格的长度相等;为三根固定在转臂上的挡板,可与转臂上做圆周运动的实验球产生挤压,从而提供向心力。图中的标尺1和2可以显示出两球所受向心力的大小关系。可供选择的实验球有:质量均为的球1和球2,质量为m的球3。


(1)在研究向心力的大小F与质量m、角速度和半径r之间的关系时,我们主要用到了物理学中的。
A.等效替代法 B.控制变量法 C.理想实验法 D.转化法
(2)实验时将球1、球2分别放在挡板位置,将皮带与轮②和轮⑤连接,转动手柄观察左右两个标尺,此过程是验证向心力的大小与的关系。
(3)实验时将皮带与轮③和轮⑥相连,将球分别放在挡板位置,转动手柄,则标尺1和标尺2显示的向心力之比为。
-
10、某学习小组用实验探究“平拋运动规律”。
 (1)、在图1中用小锤敲击铁片,观察到A、B两个小球 , 则说明平抛运动在竖直方向上做运动。(2)、在图2中同时断电后P、Q两个小球同时沿着斜槽滚下,观察到P、Q两个小球撞在一起,则说明平抛运动在水平方向上做________运动。(3)、以下研究平抛运动实验过程的一些做法,其中合理的( )A、安装斜槽轨道,使其末端保持水平 B、每次小球释放的初始位置可以任意选择 C、每次小球应从同一位置由静止释放(4)、已知图中小方格的边长 , 则小球平拋的初速度为________(结果保留两位有效数字,)
(1)、在图1中用小锤敲击铁片,观察到A、B两个小球 , 则说明平抛运动在竖直方向上做运动。(2)、在图2中同时断电后P、Q两个小球同时沿着斜槽滚下,观察到P、Q两个小球撞在一起,则说明平抛运动在水平方向上做________运动。(3)、以下研究平抛运动实验过程的一些做法,其中合理的( )A、安装斜槽轨道,使其末端保持水平 B、每次小球释放的初始位置可以任意选择 C、每次小球应从同一位置由静止释放(4)、已知图中小方格的边长 , 则小球平拋的初速度为________(结果保留两位有效数字,) -
11、如图所示,一物体从固定的光滑竖直面圆弧轨道上端由静止下滑过程中,下列说法正确的是( )
 A、当物体滑到轨道最低点时,物体处于受力平衡状态 B、当物体滑到轨道最低点时,物体处于超重状态 C、当物体滑到轨道最低点时,合外力指向圆心 D、物体下滑过程中,合外力一直指向圆心
A、当物体滑到轨道最低点时,物体处于受力平衡状态 B、当物体滑到轨道最低点时,物体处于超重状态 C、当物体滑到轨道最低点时,合外力指向圆心 D、物体下滑过程中,合外力一直指向圆心 -
12、利用引力常量G和下列某一组数据,可以计算出地球质量的是( )A、地球的半径及重力加速度(不考虑地球自转) B、人造卫星在地面附近绕地球做圆周运动的速度及周期 C、月球绕地球做圆周运动的周期及月球与地球间的距离 D、地球绕太阳做圆周运动的周期及地球与太阳间的距离
-
13、如图,小船从河岸处A点出发渡河。若河宽为100m,河水流速 , 方向平行于河岸指向河的下游,船在静水中速度 , 船头方向与河岸垂直,船视为质点,则下列说法正确的是( )
 A、小船从A点出发经过20s到达对岸 B、小船到达对岸的位置在河正对岸下游125m处 C、若河水流速变慢,小船从A点到对岸的时间可能低于20s D、若小船行驶到河中央时水流变快,小船过河时间不变
A、小船从A点出发经过20s到达对岸 B、小船到达对岸的位置在河正对岸下游125m处 C、若河水流速变慢,小船从A点到对岸的时间可能低于20s D、若小船行驶到河中央时水流变快,小船过河时间不变 -
14、如图所示,汽车用跨过定滑轮的轻绳提升物块。汽车匀速向左运动,在物块到达滑轮之前,下列说法正确的是( )
 A、物块将竖直向上做匀速运动 B、物块受到绳的拉力大于重力 C、物块受到绳的拉力等于重力 D、物块将竖直向上先加速后减速
A、物块将竖直向上做匀速运动 B、物块受到绳的拉力大于重力 C、物块受到绳的拉力等于重力 D、物块将竖直向上先加速后减速 -
15、在风洞实验室中进行如图所示的实验,光滑的水平面上一小球以速度v0向东运动,运动中要穿过水平向北的风洞MN,在风洞施加的水平恒力作用下,小球通过风洞过程及通过后的轨迹正确的图是( )
 A、
A、 B、
B、 C、
C、 D、
D、
-
16、关于圆周运动,下列说法中正确的是( )A、匀速圆周运动是匀变速运动 B、圆周运动中向心力的作用效果只改变线速度的方向,不改变线速度的大小 C、做圆周运动的物体,所受的合外力一定指向圆心 D、在匀速圆周运动中,向心加速度恒定
-
17、中国选手刘诗颖在2020东京奥运会田径女子标枪决赛中以66米34的成绩获得金牌!刘诗颖的“冠军一投”的运动简化图如图所示。投出去的标枪做曲线运动,忽略空气阻力,关于标枪的运动及曲线运动,下列说法正确的是( )
 A、出手后标枪的加速度是变化的 B、速度发生变化的运动,一定是曲线运动 C、标枪升到最高点时速度为零 D、标枪运动先减速上升,后加速下降
A、出手后标枪的加速度是变化的 B、速度发生变化的运动,一定是曲线运动 C、标枪升到最高点时速度为零 D、标枪运动先减速上升,后加速下降 -
18、关于做平抛运动的物体,下列说法正确的是( )A、物体在任意相等时间内位移的增量都相等 B、物体做的是加速度大小、方向都不变的匀变速曲线运动 C、水平射程由初速度决定,初速度越大,水平射程越大 D、在空中运动的时间由初速度决定,初速度越大,时间越长
-
19、在竖直平面内有xOy直角坐标系,区域内有竖直向下的匀强电场,第一象限有水平向右的匀强电场,两区域场强大小相等,区域内还有向里的匀强磁场。下端位于O点的绝缘木板固定在第一象限,上端位于磁场右边界,与夹角 , 木板下端锁定了两个可视为质点的带电滑块P和滑块Q,电荷量大小均为 , P的质量为 , Q的质量为 , 两滑块间有一根压缩的绝缘微弹簧(不连接)。现解除锁定,弹簧瞬间恢复原长(无机械能损失)后,P做匀速圆周运动,Q恰好与木板无压力。忽略电荷间的相互作用,重力加速度 , , , , 求:
 (1)、滑块P和滑块Q所带电性;(2)、解除锁定前的弹性势能;(3)、滑块P从开始运动到第一次过轴所用时间和滑块Q离开木板后在电场中的运动时间(保留小数点后一位,可保留根号)。
(1)、滑块P和滑块Q所带电性;(2)、解除锁定前的弹性势能;(3)、滑块P从开始运动到第一次过轴所用时间和滑块Q离开木板后在电场中的运动时间(保留小数点后一位,可保留根号)。 -
20、如图所示,电阻不计足够长的光滑平行金属导轨与水平面夹角 , 导轨间距l,所在平面的正方形区域abcd内存在有界匀强磁场,磁感应强度方向垂直斜面向上。甲、乙金属杆质量均为、电阻均为 , 甲金属杆处在磁场的上边界,乙金属杆距甲也为l,其中。同时无初速释放两金属杆,此刻在甲金属杆上施加一个沿着导轨的外力F,保持甲金属杆在运动过程中始终与乙金属杆未进入磁场时的加速度相同。取
 (1)、乙金属杆刚进入磁场后做匀速运动,求匀强磁场的磁感应强度?(2)、若从开始释放到乙金属杆离开磁场,乙金属杆中共产生热量 , 试求此过程中外力F对甲做的功。
(1)、乙金属杆刚进入磁场后做匀速运动,求匀强磁场的磁感应强度?(2)、若从开始释放到乙金属杆离开磁场,乙金属杆中共产生热量 , 试求此过程中外力F对甲做的功。