-
1、水袖是对我国古代服饰衣袖的夸张展现,是戏装的重要组成部分。戏曲演员通过技法和身体的表现力,体现出“行云流水”般的美感。如果某段时间里水袖波形可视为简谐波,如图甲所示为演员水袖表演过程中t=0时刻的波形图,P是平衡位置x=4m处的质点,图乙为质点P的振动图像,则( )
 A、该简谐波的传播速度为0.5m/s B、该简谐波沿x轴正方向传播 C、x=3m处的质点在t=7s时位于平衡位置 D、质点P在0~7s时间内运动的路程为140cm
A、该简谐波的传播速度为0.5m/s B、该简谐波沿x轴正方向传播 C、x=3m处的质点在t=7s时位于平衡位置 D、质点P在0~7s时间内运动的路程为140cm -
2、图甲是目前世界上在建规模最大、技术难度最高的水电工程——白鹤滩水电站,是我国实施“西电东送”的大国重器,其发电量位居全世界第二,仅次于三峡水电站。白鹤滩水电站远距离输电电路示意图如图乙所示。如果升压变压器与降压变压器均为理想变压器,发电机输出电压恒定,r表示输电线总电阻,下列说法正确的是( )
 A、若 , 则用户获得的电压U4=U1 B、若用户开启的用电器减少,则升压变压器输出的电压U2减小 C、若用户开启的用电器减少,则降压变压器输入的电压U3减小 D、若用户开启的用电器减少,则输电线消耗的功率减小
A、若 , 则用户获得的电压U4=U1 B、若用户开启的用电器减少,则升压变压器输出的电压U2减小 C、若用户开启的用电器减少,则降压变压器输入的电压U3减小 D、若用户开启的用电器减少,则输电线消耗的功率减小 -
3、一只质量为m的蚂蚁(可视为质点)在半球形碗内从底部缓慢向上爬,某时刻处在如图所示位置,此时蚂蚁和球心的连线与竖直方向的夹角为θ,重力加速度为g,下列说法正确的是( )
 A、蚂蚁受到4个力的作用 B、碗受到蚂蚁的摩擦力大小为mgsinθ C、蚂蚁受到碗的支持力大小为mgtanθ D、蚂蚁继续缓慢上爬过程中受到碗的作用力逐渐增大
A、蚂蚁受到4个力的作用 B、碗受到蚂蚁的摩擦力大小为mgsinθ C、蚂蚁受到碗的支持力大小为mgtanθ D、蚂蚁继续缓慢上爬过程中受到碗的作用力逐渐增大 -
4、离子烟雾报警器是一种常见且广泛使用的火灾报警设备。某离子烟雾报警器中装有放射性元素镅(),其半衰期为432.2年,衰变方程为。下列说法正确的是( )A、镎核()比镅核()少了2个中子 B、X是β粒子,具有很强的电离本领 C、镅核()的比结合能比镎核()的比结合能大 D、100个镅核()经过432.2年后一定还剩余50个
-
5、如图所示,虚线左侧的水平地面粗糙,右侧的水平地面光滑,在虚线右侧静止放置质量、长度为的长木板B,B的右端静止放置着另一质量的小物块C,在虚线左侧处一质量的物块A以的初速度向右运动,一段时间后A与B发生碰撞,碰撞后A最终停在距离虚线左侧处,小物块C没有滑离长木板B。已知A与左侧地面间的动摩擦因数 , 重力加速度g取 , A、C均可视为质点,求:
 (1)、A与B发生碰撞后瞬间,B速度的大小;(2)、C与B间动摩擦因数的取值范围。
(1)、A与B发生碰撞后瞬间,B速度的大小;(2)、C与B间动摩擦因数的取值范围。 -
6、如图M、N之间是加速电场,虚线框内为匀强偏转电场;一电子从静止开始沿带箭头的实线所示的轨迹前进。已知电子的质量为m,电荷量为e,加速电场M、N两端的电压为。偏转电场的水平宽度为 , 电场强度 , 不考虑电子所受的重力及空气阻力。求:
 (1)、电子刚进入偏转电场时的速度大小;(2)、电子射出偏转电场时速度方向与水平方向的夹角。
(1)、电子刚进入偏转电场时的速度大小;(2)、电子射出偏转电场时速度方向与水平方向的夹角。 -
7、如图所示,定值电阻 , R为电阻箱,其最大阻值为 , 电压表为理想电表,当电阻箱示数时,电压表读数为;当电阻箱示数时,电压表读数为 , 求电源的电动势E和内电阻r。

-
8、实验小组的同学们利用单摆、手机、直尺、游标卡尺测量当地的重力加速度。
 (1)、小组利用手机秒表测量时间,具体做法是:把小球适当拉开一个角度,从静止释放,当小球第1次经过最低点开始计时,第61次经过最低点时结束计时,此时秒表读数为59.85秒,则单摆的周期s(计算结果保留3位有效数字)。(2)、测得小球直径 , 绳长 , 则重力加速度的测量值为(取3.14,计算结果保留3位有效数字)。
(1)、小组利用手机秒表测量时间,具体做法是:把小球适当拉开一个角度,从静止释放,当小球第1次经过最低点开始计时,第61次经过最低点时结束计时,此时秒表读数为59.85秒,则单摆的周期s(计算结果保留3位有效数字)。(2)、测得小球直径 , 绳长 , 则重力加速度的测量值为(取3.14,计算结果保留3位有效数字)。 -
9、某同学要测量一均匀新材料制成的圆柱体电阻丝的电阻率 , 设计了如图所示的电路。
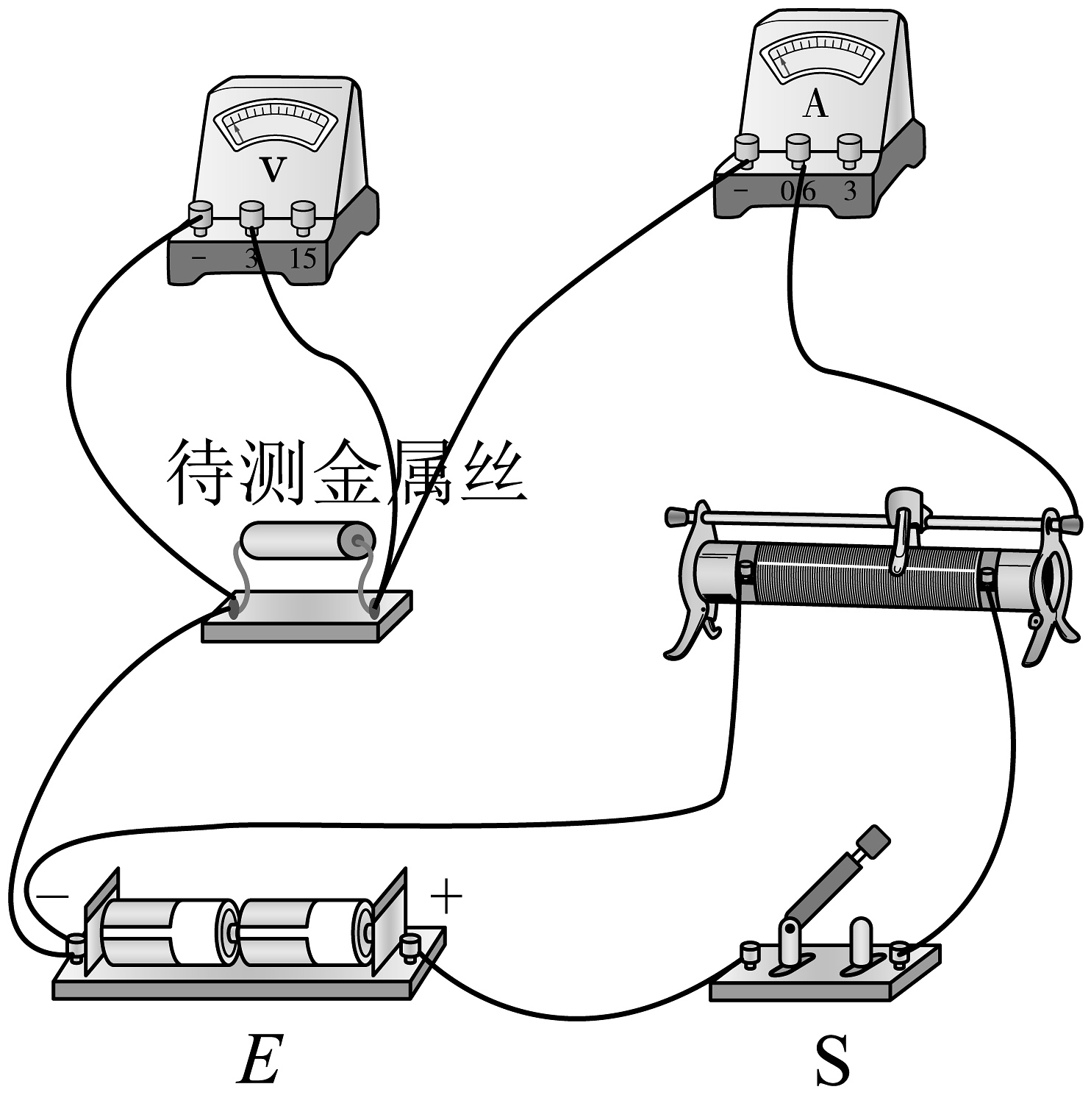 (1)、闭合开关前,将滑动变阻器的滑片移到最(填“左”或“右”)端;(2)、若已知伏安法测电阻电路中电压表和电流表示数分别用U和I表示,电阻丝的直径为D,长度为L,则用此法测出该圆柱体材料的电阻率(用题中所给字母L、D、U、I表示);(3)、由于系统误差,最终测得的金属丝的电阻率比实际值(填“大”或“小”)。
(1)、闭合开关前,将滑动变阻器的滑片移到最(填“左”或“右”)端;(2)、若已知伏安法测电阻电路中电压表和电流表示数分别用U和I表示,电阻丝的直径为D,长度为L,则用此法测出该圆柱体材料的电阻率(用题中所给字母L、D、U、I表示);(3)、由于系统误差,最终测得的金属丝的电阻率比实际值(填“大”或“小”)。 -
10、某实验小组在实验室练习使用多用电表测电阻,多用电表表盘如图所示,一同学在完成机械调零后,准备测量电阻,他进行如下操作,请帮助他完成以下实验步骤:

(1)将K旋转到电阻挡“”的位置。
(2)将红、黑表笔短接,旋动(填“S”或“T”),使指针对准电阻挡的刻线(填“0”或“∞”)。
-
11、某同学测量一金属棒的尺寸,结果如下图所示。用螺旋测微器测得棒的直径为mm;用游标卡尺测金属棒长度为cm。

-
12、两列振幅相等的相干水波在某时刻叠加情况如图所示,实线表示波峰,虚线表示波谷,O点为BD连线的中点。在A、B、C、D、O五个点中,振动加强的点是 , 振动减弱的点是。

-
13、我们可以通过以下实验,来探究产生感应电流的条件。
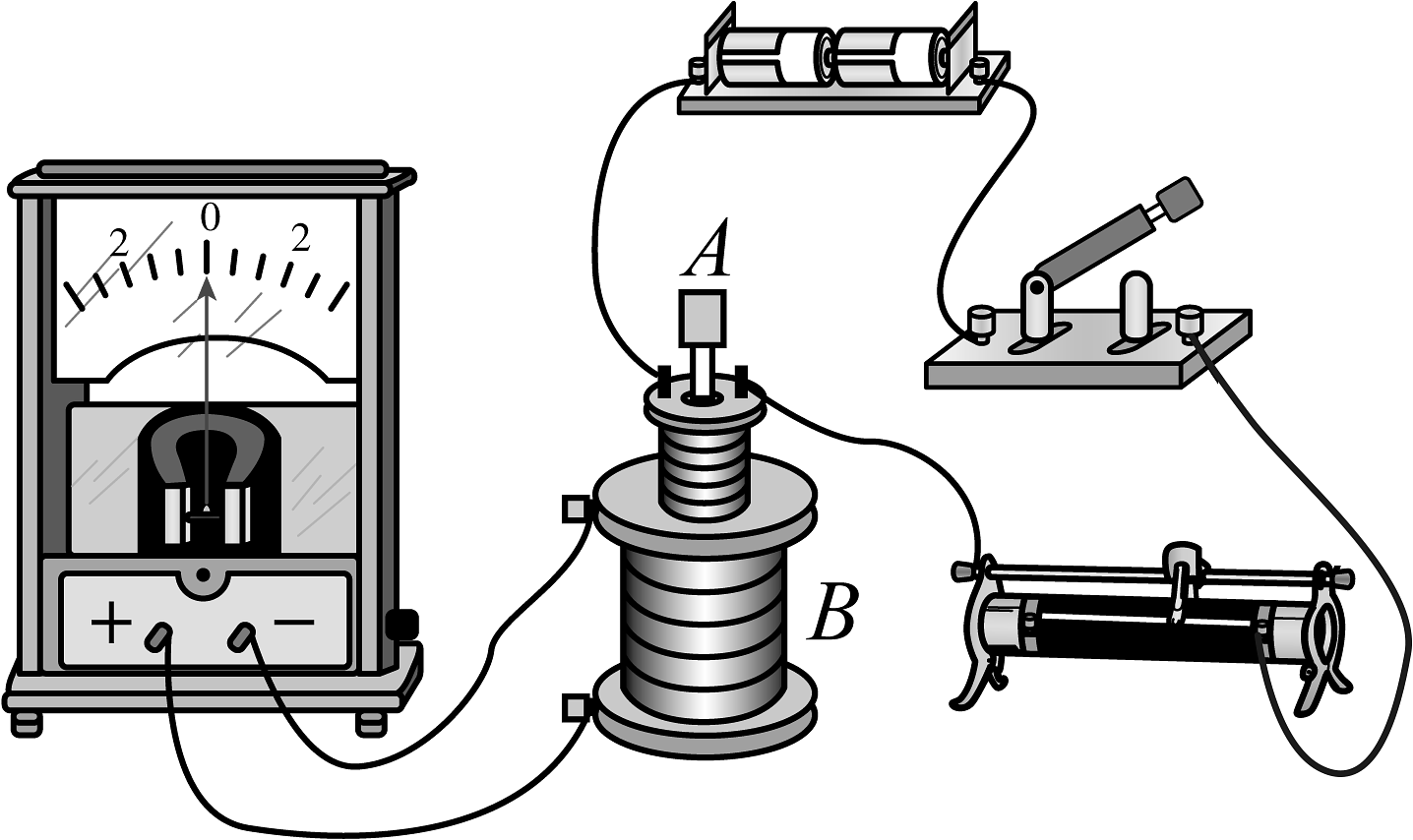 (1)、接好电路,合上开关瞬间,电流表指针(填“偏转”或“不偏转”);(2)、电路稳定后,电流表指针(填“偏转”或“不偏转”)。
(1)、接好电路,合上开关瞬间,电流表指针(填“偏转”或“不偏转”);(2)、电路稳定后,电流表指针(填“偏转”或“不偏转”)。 -
14、某电容器充电时,其电荷量Q、电压U、电容C之间的关系如图所示,其中正确的是( )A、
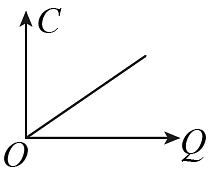 B、
B、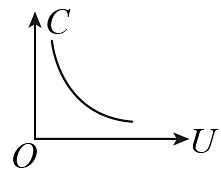 C、
C、 D、
D、
-
15、如图是一种利用电磁原理制作的充气泵的结构示意图。当电磁铁通入电流时,可吸引或排斥上部的小磁铁,从而带动弹性金属片对橡皮碗下面的气室施加力的作用,达到充气的目的。下列说法正确的是( )
 A、电磁铁的工作原理是电流的磁效应 B、电磁铁用的铁芯应选用不易退磁的材料 C、工作时AB接线柱应接入稳恒电流 D、当电流从B接线柱流入时,电磁铁吸引小磁铁向下运动,则小磁铁的下端为S极
A、电磁铁的工作原理是电流的磁效应 B、电磁铁用的铁芯应选用不易退磁的材料 C、工作时AB接线柱应接入稳恒电流 D、当电流从B接线柱流入时,电磁铁吸引小磁铁向下运动,则小磁铁的下端为S极 -
16、高空坠物危害极大,如图为高空坠物的公益广告,形象地描述了高空坠物对人伤害的严重性。小刚同学用下面的实例来检验广告的科学性:设一个50g的鸡蛋从80米的窗户自由落下,鸡蛋与地面撞击时间约为 , 不计空气阻力,g取 , 规定竖直向下为正方向。则下列说法正确的是( )
 A、鸡蛋刚与地面接触时重力的功率为10W B、该鸡蛋对地面的平均冲击力大小约为1000N C、与地面撞击过程,鸡蛋的动量改变量为2kg·m/s D、鸡蛋下落过程(从开始下落到与地面刚好接触的过程)重力的冲量为0.2N·s
A、鸡蛋刚与地面接触时重力的功率为10W B、该鸡蛋对地面的平均冲击力大小约为1000N C、与地面撞击过程,鸡蛋的动量改变量为2kg·m/s D、鸡蛋下落过程(从开始下落到与地面刚好接触的过程)重力的冲量为0.2N·s -
17、下列说法正确的是( )A、“未见其人,先闻其声”是声波发生干涉的结果 B、在波的传播方向上,某个质点的振动速度就是波的传播速度 C、当障碍物或孔的尺寸比波长大得多时,机械波会发生明显的衍射现象 D、向人体内发射频率已知的超声波,测出被血流反射后波的频率,就能知道血流的速度,这种方法俗称“彩超”,是利用了多普勒效应原理
-
18、煤气灶打火装置的原理是尖端放电,打火时放电端与灶体间的电场线如图所示,其中a、b、c为同一直线电场线上的三点,cd垂直电场线abc,已知。下列说法正确的是( )
 A、放电端O接电源的负极 B、d点和c点的电势一样高 C、a点的电场强度比d点的电场强度小 D、ab间的电势差等于bc间的电势差
A、放电端O接电源的负极 B、d点和c点的电势一样高 C、a点的电场强度比d点的电场强度小 D、ab间的电势差等于bc间的电势差 -
19、如图所示,弹簧振子在B、C间做简谐振动,O为平衡位置, , 若振子从B第一次运动到O的时间是0.5s,则下列说法正确的是( )
 A、振幅是10cm B、振动周期是1s C、经过一次全振动,振子通过的路程是10cm D、从B开始经过3s,振子通过的路程是30cm
A、振幅是10cm B、振动周期是1s C、经过一次全振动,振子通过的路程是10cm D、从B开始经过3s,振子通过的路程是30cm -
20、如图所示,质量均为1kg的物块A、B静止在水平面上,A、B由劲度系数为3N/cm的轻弹簧相连,物块A套在竖直杆上,在竖直向上的力F作用下沿杆缓慢上移,已知物块A、B处于水平面时距离为16cm,弹簧原长为18cm,物块B与地面间动摩擦因数为0.75,物块A与杆间动摩擦因数为0.5,设最大静摩擦力等于滑动摩擦力。( , , , )
(1)当A在地面时,B所受的摩擦力为多少?
(2)当A上升到c点时,弹簧的弹力恰为使物块B运动的最小值,已知c点的高度 , B运动之前,力F随上升高度h的变化如图所示,求出坐标a、b和Fc的数值。
