-
1、如图所示,A、B、C三个完全相同的水泥管道静止叠放在水平地面上,则下列说法正确的是( )
 A、B对A的支持力大小与A对B的压力大小相等 B、地面对B、C均没有摩擦力 C、B对A的支持力方向竖直向上 D、起重机吊走A后,B、C与地面之间没有摩擦力
A、B对A的支持力大小与A对B的压力大小相等 B、地面对B、C均没有摩擦力 C、B对A的支持力方向竖直向上 D、起重机吊走A后,B、C与地面之间没有摩擦力 -
2、关于速度的说法,下列各项正确的是( )A、速度是描述物体运动快慢的物理量,速度大表示物体运动得快 B、速度描述物体位置变化的快慢,速度大表示物体位置变化大 C、速度越大,位置变化越快,位移也就越大 D、瞬时速度的大小通常叫作速率,速度是矢量,速率是标量
-
3、西湖音乐喷泉位于湖滨三公园附近湖面上,高的“音乐喷泉”向人们展露迷人风资。设最高的那注喷泉竖直向上喷出,且这注喷泉对应的喷嘴的出水量为0.35m3/s,不计空气阻力,则这注喷泉空中水的体积约为( )(取)
 A、 B、 C、 D、因喷嘴横截面积未知,故无法确定
A、 B、 C、 D、因喷嘴横截面积未知,故无法确定 -
4、一串小灯笼(五只)彼此用轻绳连接,并悬挂在空中。在稳定水平风力作用下发生倾斜,悬绳与竖直方向的夹角为 , 如图所示。设每只灯笼的质量均为 , 重力加速度为。则自上往下第二只灯笼与第三只灯笼间的悬绳对第三只灯笼的拉力大小为( )
 A、 B、 C、 D、
A、 B、 C、 D、 -
5、熊大正在玩蹦床游戏,如图所示,从熊大接触蹦床至其到达最低点,下列说法正确的是( )
 A、熊大的速度一直增大 B、熊大的速度一直减小 C、熊大的加速度一直增大 D、熊大的加速度先减小后增大
A、熊大的速度一直增大 B、熊大的速度一直减小 C、熊大的加速度一直增大 D、熊大的加速度先减小后增大 -
6、如图所示,建筑工人在砌墙时需要将砖块运送到高处,采用的方式是-工人甲在低处将一摞砖竖直向上抛出,在高处的工人乙将其接住。每块砖的质量均为 , 现只考虑最上层的两块砖,不计空气阻力,下列说法正确的是( )
 A、工人甲在将砖块抛出时(砖未离手)砖块处于失重状态 B、工人甲在将砖块拋出时(砖未离手)砖块间作用力等于 C、工人甲在将砖块拋出后,砖块处于失重状态 D、工人甲在将砖块抛出后,砖块间作用力等于
A、工人甲在将砖块抛出时(砖未离手)砖块处于失重状态 B、工人甲在将砖块拋出时(砖未离手)砖块间作用力等于 C、工人甲在将砖块拋出后,砖块处于失重状态 D、工人甲在将砖块抛出后,砖块间作用力等于 -
7、两车A、B从同一位置由静止开始沿相同方向同时开始做直线运动,其运动的v—t图象如下图所示。对运动情况的分析,下列结论正确的是( )
 A、A车减速时的加速度比B车减速时的加速度大 B、在前,两车间的距离一直在减小 C、在前,B车已经追上A车 D、B车停下前不可能撞上A车
A、A车减速时的加速度比B车减速时的加速度大 B、在前,两车间的距离一直在减小 C、在前,B车已经追上A车 D、B车停下前不可能撞上A车 -
8、在物理学的重大发现中科学家们总结出了许多物理学方法,如理想实验法、控制变量法、极限思想法、类比法、微元法、科学假设法和建立物理模型法等。以下关于物理学研究方法的叙述正确的是( )A、在不需要考虑物体本身的大小和形状时,用质点来代替物体的方法运用了假设法 B、运动学中速度、加速度的定义都运用了比值法 C、当物体的运动时间趋近于0时,时间内的平均速度可看成瞬时速度运用了等效替代法 D、在推导匀变速直线运动位移公式时,把整个运动过程等分成很多小段,然后将各小段位移相加,运用了极限思想法
-
9、下列对于力学的一些基本概念的理解说法正确的是( )A、时刻就是极短的时间 B、位移大小一般比路程小,但当物体做直线运动时,位移大小等于路程 C、若有外国航母战斗群介入台海局势,我国的“东风”系列导弹可攻击敌方航母的“心脏”-燃烧室,此时敌方航母可视为质点 D、“天问一号”正奔赴在探索火星的路上,目前进行了二次轨道修正,科技人员在讨论如何修正它的轨道时不能视“天问一号”为质点
-
10、某科研小组设计了一种列车的电磁阻尼辅助刹车系统,原理如图所示。在列车的车厢下面固定一个磁场控制系统,能在长为 L₁、宽为 L₂的矩形区域内产生方向竖直向下、大小为 B 的匀强磁场,在铁轨上安装长为L₁、宽为 L₂的单匝矩形线圈若干个,相邻两个线圈间距为 L₂,每个线圈的电阻为 R。设质量为 m 的列车以初速度v 无动力进入减速区域,运动过程中制动力可以改变,使列车做匀减速直线运动,当列车磁场控制系统的磁场刚好通过个线圈时,列车的速度减为零,重力加速度为g,求:
 (1)、磁场控制系统的磁场全部进入第一个线圈过程中,通过第一个线圈截面的电荷量;(2)、磁场控制系统的磁场刚进入第二个线圈时,克服安培力做功的瞬时功率;(3)、整个刹车过程中,除电磁阻力外的其它阻力的冲量。
(1)、磁场控制系统的磁场全部进入第一个线圈过程中,通过第一个线圈截面的电荷量;(2)、磁场控制系统的磁场刚进入第二个线圈时,克服安培力做功的瞬时功率;(3)、整个刹车过程中,除电磁阻力外的其它阻力的冲量。 -
11、如图(a)所示,门球又称槌球,比赛时以球槌击球,球过球门即可得分.如图(b)所示,某次比赛中完全相同的1号球、3号球与门洞恰好位于一条直线上,两球之间的距离 , 3号球与球门之间的距离。运动员用球槌水平打击1号球,使其获得向右的初速度 , 经过一段时间后,该球以的速度与3号球发生碰撞(碰撞时间极短),碰后1号球又向前运动了后停下来.已知两球质量均为 , 将两球的运动视为一条直线上的滑动并且两球与地面间的滑动摩擦因数相同,重力加速度g取
 (1)、求球与地面的动摩擦因数;(2)、求两球碰撞过程中损失的机械能;(3)、通过分析,判断3号球能否进门得分。
(1)、求球与地面的动摩擦因数;(2)、求两球碰撞过程中损失的机械能;(3)、通过分析,判断3号球能否进门得分。 -
12、干瘪的乒乓球在室外温度为270K时,体积为 , 球内压强。为了让乒乓球鼓起来,将其放入温度恒为330K热水中,经过一段时间后鼓起来了,体积恢复原状V,此过程气体对外做功为 , 球内的气体视为理想气体且不漏气,若球内气体的内能满足(k为常量且大于零),求:(1)、恢复原状的乒乓球内气体的压强;(2)、干瘪的乒乓球恢复原状的过程中,乒乓球内气体吸收的热量。
-
13、某实验小组,欲测量一节5号电池的内阻r和待测定值电阻R的阻值,器材如下:待测5号电池一节(电动势1.5V,内阻r待测),同规格待测电阻R若干,毫安表(量程500mA,内阻 , 开关,导线若干。实验步骤如下:
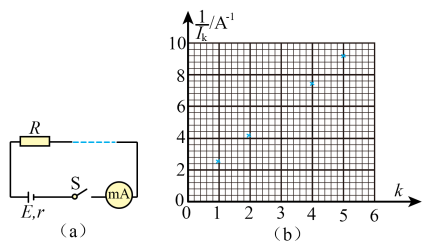 (1)、按图(a)所示电路图,连接实物电路。(2)、依次将1只定值电阻、2只定值电阻、…k…只定值电阻串联接入电路中,电路中毫安表的读数依次为、、……,将电流表的读数记录在表格中。
(1)、按图(a)所示电路图,连接实物电路。(2)、依次将1只定值电阻、2只定值电阻、…k…只定值电阻串联接入电路中,电路中毫安表的读数依次为、、……,将电流表的读数记录在表格中。接入电路的电阻个数k
1
2
3
4
5
毫安表读数Ik(mA)
405
242
172
134
110
电流倒数(A⁻¹)
2.47
4.13
5.80
7.47
9.09
(3)、断开电路,整理器材。根据以上操作,试回答下列问题:
①电路中电动势 , 电流 , 定值电阻R,所满足的关系是(用代表相应物理量的字母表示,设接入电路中的定值电阻个数为k)。
②以为纵坐标,k为横坐标,在坐标纸上描点,如图(b)所示,其中第3组数据坐标纸上没有描出,请在图(b)中将它描出,并在坐标纸上完成作图。
③根据图(b)中的图像,可知电源的内阻r=Ω,定值电阻的阻值R=Ω。(结果均保留两位有效数字)
④若实际电源的电动势略低于1.5V,则电源内阻的测量值将。
A.偏大 B.偏小 C.准确 D.不确定
-
14、某同学用单摆测重力加速度,装置如图(a)所示,其中悬挂的小球为磁性小球,
 (1)、用游标卡尺测量小球的直径,示数如图(b)所示,读数为mm。(2)、打开手机的磁传感器,将手机放在静止小球的正下方,让小球做单摆运动,小球运动到最低点时,手机就接收到一个磁感应强度脉冲,若接收到连续的81个磁感应强度脉冲所用时间为 80.40 s,则单摆摆动的周期s;若测得摆线长为990.95 mm,则当地的重力加速度为(结果保留小数点后两位)。(3)、为了减小实验误差,该同学通过改变摆长多次实验,测得多组摆长L与对应的周期T,建立坐标系,作出的图像如图(c)所示,测得图像的斜率为k、则求得的重力加速度(用k和π表示)。
(1)、用游标卡尺测量小球的直径,示数如图(b)所示,读数为mm。(2)、打开手机的磁传感器,将手机放在静止小球的正下方,让小球做单摆运动,小球运动到最低点时,手机就接收到一个磁感应强度脉冲,若接收到连续的81个磁感应强度脉冲所用时间为 80.40 s,则单摆摆动的周期s;若测得摆线长为990.95 mm,则当地的重力加速度为(结果保留小数点后两位)。(3)、为了减小实验误差,该同学通过改变摆长多次实验,测得多组摆长L与对应的周期T,建立坐标系,作出的图像如图(c)所示,测得图像的斜率为k、则求得的重力加速度(用k和π表示)。 -
15、如图(a)所示,某建筑工地正用吊车将装混凝土的料斗竖直向上起吊到高处,料斗从静止开始向上运动的加速度随上升高度变化的规律如图(b)所示,若装有混凝土的料斗总质量为1吨,重力加速度为 , 下列说法正确的是( )
 A、从h=4m到h=5m运动过程,料斗做匀减速运动 B、从静止开始上升到高度5m时,料斗的速度大小为 C、从静止开始上升5m过程中,料斗运动的时间为 D、从静止开始上升5m过程中,吊车对料斗做功为
A、从h=4m到h=5m运动过程,料斗做匀减速运动 B、从静止开始上升到高度5m时,料斗的速度大小为 C、从静止开始上升5m过程中,料斗运动的时间为 D、从静止开始上升5m过程中,吊车对料斗做功为 -
16、火卫一和火卫二是火星仅有的两颗天然卫星,其轨道近似为圆周,天文观测发现火卫一距离火星中心9370千米,火卫二距离火星中心23500千米,科学家已经确认火卫一的公转轨道正在缓慢下降,而火卫二却在慢慢远离火星,对于火星的两颗卫星,下列说法正确的是( )A、火卫一的向心加速度大于火卫二 B、火卫一的公转线速度小于火卫二 C、火卫一的公转线速度缓慢增大,火卫二的公转线速度缓慢减小 D、火卫一的公转线速度缓慢减小,火卫二的公转线速度缓慢增大
-
17、如图(a)所示,水袖舞是中国京剧的特技之一。某时刻抖动可简化为如图(b),下列说法正确的是( )
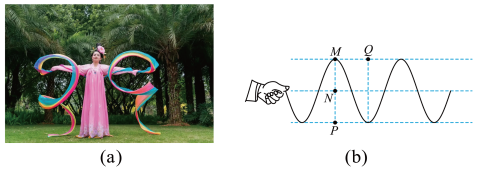 A、M 处的质点回复力最大 B、M处的质点经过四分之一个周期到达Q处 C、加快抖动的频率,传播速度变快 D、质点振动到N处时速度最大
A、M 处的质点回复力最大 B、M处的质点经过四分之一个周期到达Q处 C、加快抖动的频率,传播速度变快 D、质点振动到N处时速度最大 -
18、如图(a)所示的智能机器人广泛应用于酒店、医院等场所.机器人内电池的容量为 , 负载时正常工作电流约为 , 电池容量低于20%时不能正常工作,此时需要用充电器对其进行充电,充电器的输入电压如图(b)所示.下列说法正确的是( )
 A、充电器的输入电流频率为 B、充电器的输入电压瞬时表达式为 C、机器人充满电后电池的电量为 D、机器人充满电后,负载时大约可以持续正常工作
A、充电器的输入电流频率为 B、充电器的输入电压瞬时表达式为 C、机器人充满电后电池的电量为 D、机器人充满电后,负载时大约可以持续正常工作 -
19、光导纤维又称光纤,是传光的细圆玻璃丝,图(a)是光纤导光后的效果。现让由甲、乙两种单色光组成的复合光,从一根直的光纤端面以入射角射入,第一次折射后光路如图(b)所示,两束单色光均在侧面发生全反射,下列说法正确的是( )
 A、乙光在光纤中全反射临界角比甲光大 B、乙光在光纤中传播速度比甲光大 C、乙光在光纤中传播时间比甲光长 D、两种光在空气中传播遇到相同小孔时,乙光更容易衍射
A、乙光在光纤中全反射临界角比甲光大 B、乙光在光纤中传播速度比甲光大 C、乙光在光纤中传播时间比甲光长 D、两种光在空气中传播遇到相同小孔时,乙光更容易衍射 -
20、如图(a),电鲶遇到危险时,可产生数百伏的电压。如图(b)所示,若将电鲶放电时形成的电场等效为等量异种点电荷的电场,其中正电荷集中在头部,负电荷集中在尾部,O为电鲶身体的中点,且为鱼身长的一半,下列说法正确的是( )
 A、A点电势高于B点电势 B、A点场强和B点场强相同 C、将正电荷由A点移动到O点,电场力做正功 D、若电鲶头尾部间产生的电压时,间的电压为
A、A点电势高于B点电势 B、A点场强和B点场强相同 C、将正电荷由A点移动到O点,电场力做正功 D、若电鲶头尾部间产生的电压时,间的电压为