-
1、无人机空载时,由静止沿着与地面成30°的方向斜向上匀加速直线起飞,刚起飞的第1s内飞行了5m。已知无人机的质量为2kg,g=10m/s2。下列说法正确的是( )
 A、无人机在第1s末的速度为5m/s B、无人机在刚起飞的0.5s内飞行了1.5m C、空气对无人机的作用力方向竖直向上 D、空气对无人机的作用力大小为20N
A、无人机在第1s末的速度为5m/s B、无人机在刚起飞的0.5s内飞行了1.5m C、空气对无人机的作用力方向竖直向上 D、空气对无人机的作用力大小为20N -
2、在物理学的发展过程中,物理学家们做出了巨大的贡献,下列说法正确的是( )A、亚里士多德首先采用了以实验检验猜想和假设的科学方法 B、库仑首先提出电荷周围存在电场的概念 C、开普勒提出了行星运动的规律 D、牛顿发现了万有引力定律,并通过扭称装置测得了引力常量G
-
3、下列各组物理量都是矢量的是( )A、位移、时间 B、力、功率 C、加速度、速度的变化 D、速度、路程
-
4、矿井中的升降机从井底开始以5m/s的速度竖直向上匀速运行,某时刻一螺钉从升降机底板松脱,经过3s升降机底板上升至井口,此时松脱的螺钉刚好落到井底,不计空气阻力,取重力加速度大小g=10m/s2 , 求:
(1)矿井的深度;
(2)螺钉落到井底时的速度大小。
-
5、物体以速度匀速通过直线上的A、B两点间,需时为 , 现在物体从A点由静止出发,匀加速(加速度大小为)到某一最大速度后立即作匀减速运动(加速度大小为)至B点停下,历时仍为 , 则物体是( )A、只能为 , 无论、为何值 B、可为许多值,与、的大小有关 C、、的值必须是一定的 D、、必须满足
-
6、如图t=0时,甲乙两汽车从相距70km的两地开始相向行驶,它们的图象如图所示,忽略汽车掉头所需时间,下列对汽车运动状况的描述正确的是( )
 A、在第1小时末,乙车改变运动方向 B、在第2小时末,甲乙两车相距10km C、在前4小时内,乙车运动加速度的大小总比甲车的大 D、在第4小时末,甲乙两车相遇
A、在第1小时末,乙车改变运动方向 B、在第2小时末,甲乙两车相距10km C、在前4小时内,乙车运动加速度的大小总比甲车的大 D、在第4小时末,甲乙两车相遇 -
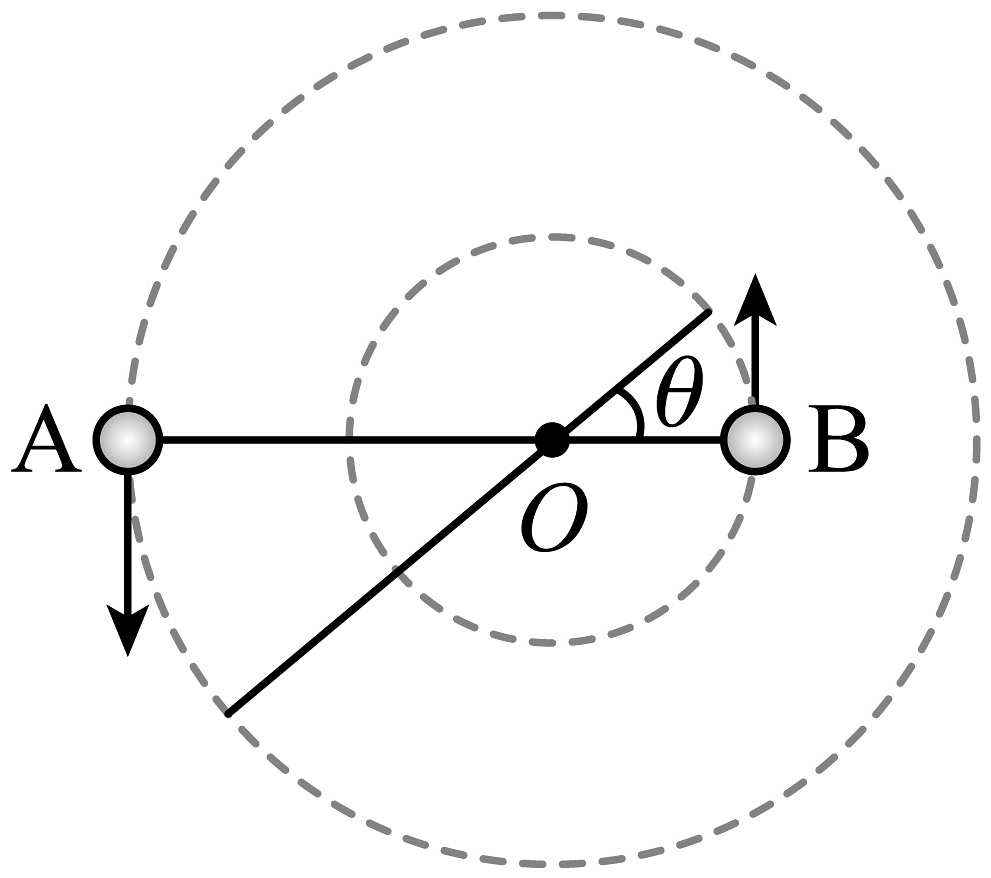
7、A、B两个小球固定在一轻杆的两端,杆套在光滑的水平转轴O上,使两球可以在竖直面内绕O点做圆周运动,B球的质量是A球质量的2倍,。给A球竖直向下初速度,A、B在竖直面内运动,取O点所在高度为重力势能参考面,从如图AOB水平开始计时,在轻杆转过180°过程中,能正确描述轻杆对B球做功W,B球动能、势能、机械能E随转过角度关系的是( )
 A、
A、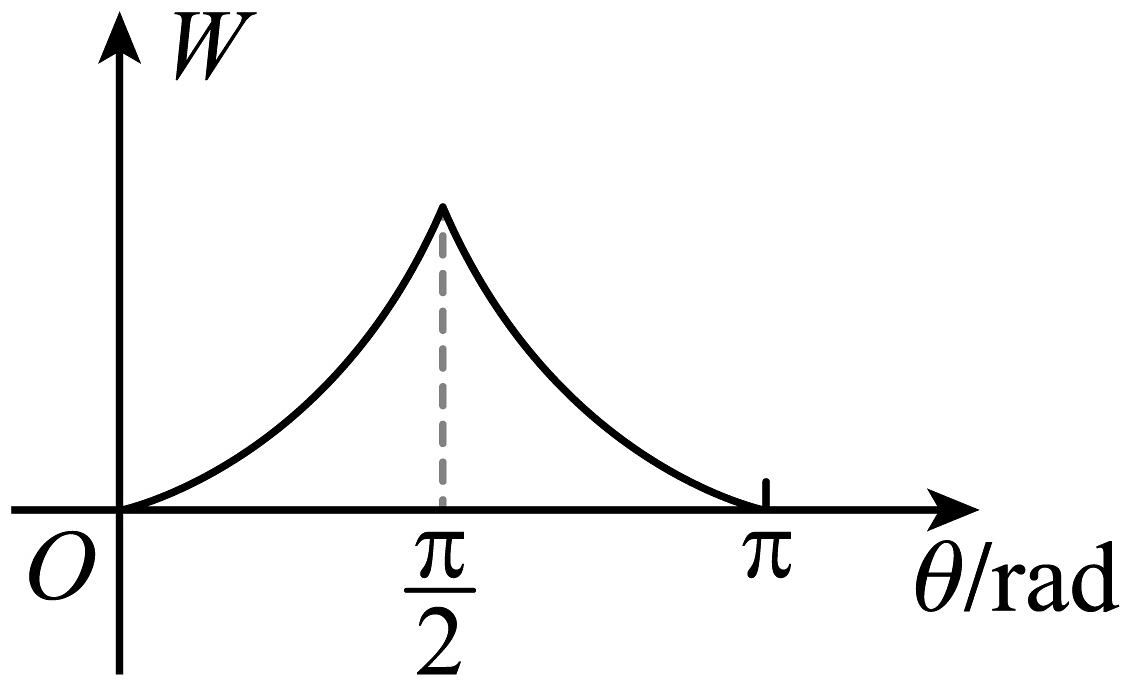 B、
B、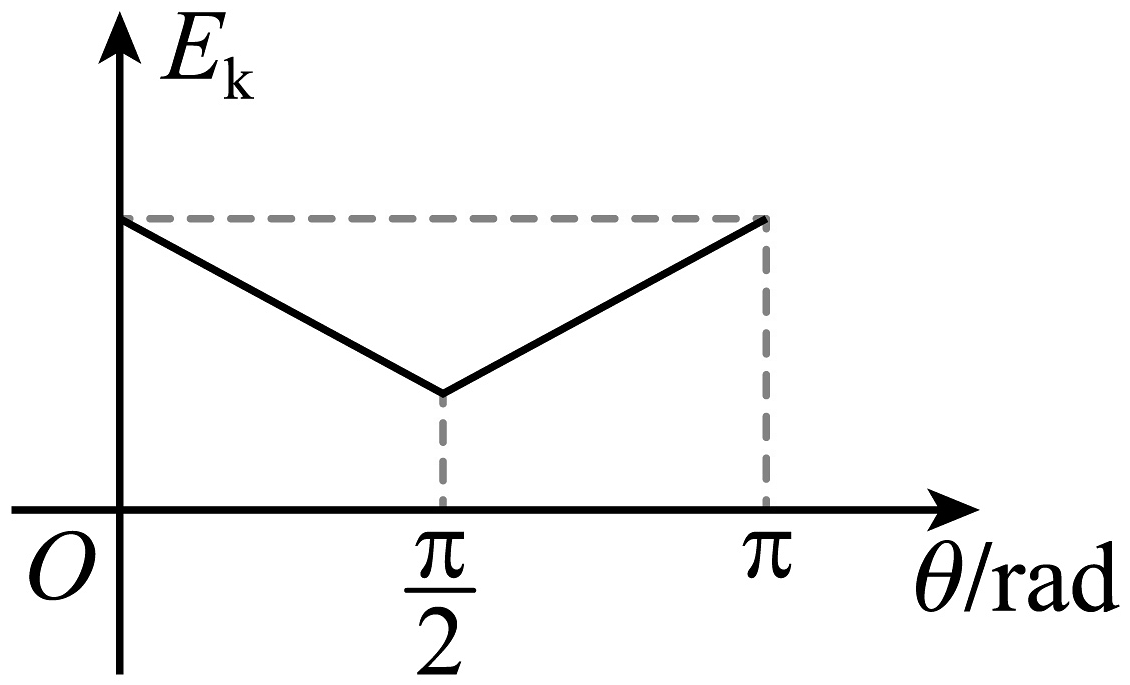 C、
C、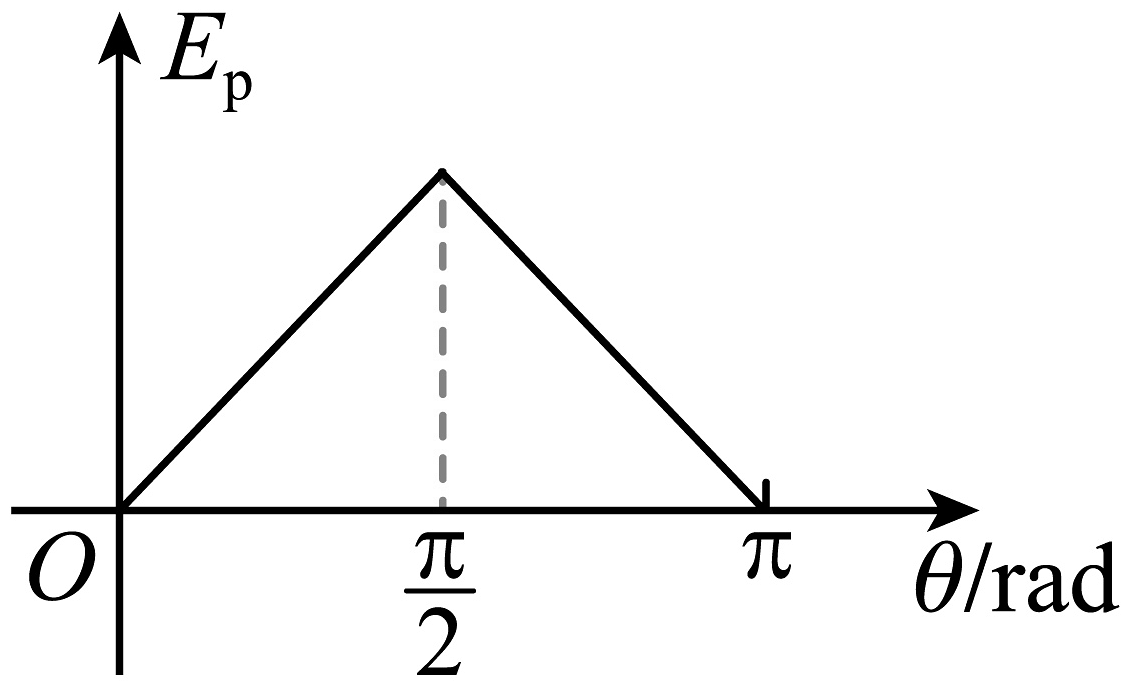 D、
D、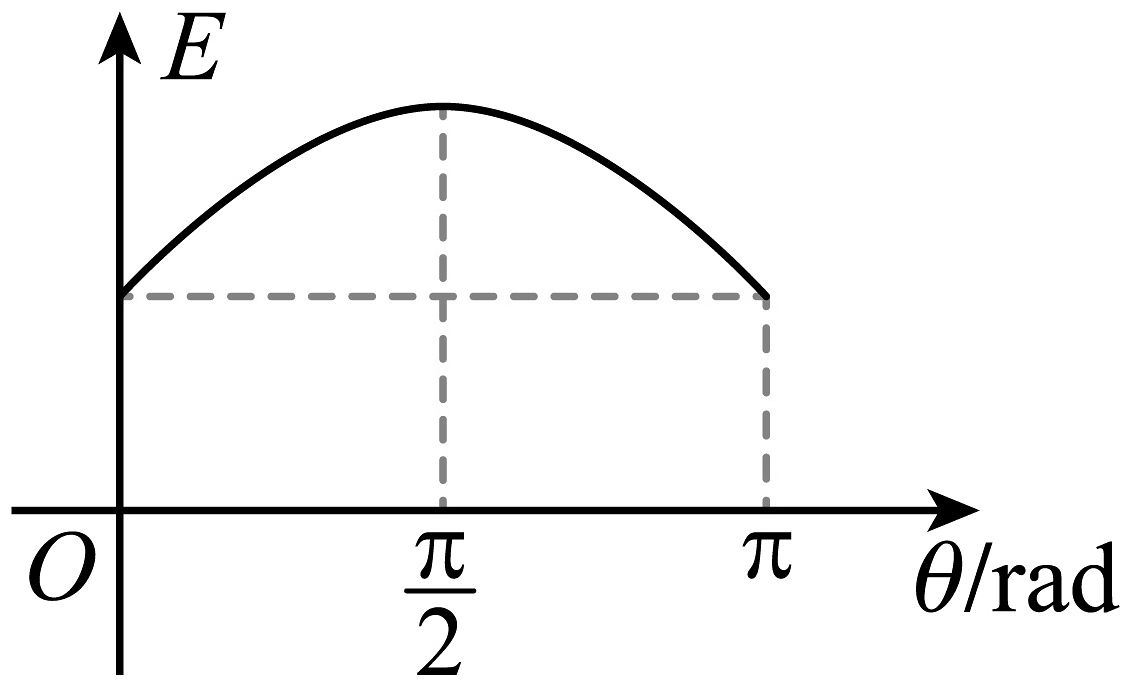
-
8、已知匝数为n的正方形线框,面积为S,垂直于磁场放置在磁感应强度为B的匀强磁场中,如图所示,则穿过该线框的磁通量为( )
 A、Φ=nBS B、Φ=BS C、 D、
A、Φ=nBS B、Φ=BS C、 D、 -
9、在下列问题的研究中,说法正确的是( )A、马拉松运动员在比赛中运动路线的长度就是运动员的位移 B、研究跳水运动员在比赛中的技术动作完成情况时,运动员可视为质点 C、举重运动员在举起杠铃时需坚持3s,3s指的是时间间隔 D、体操运动员在吊环上落下时,以地面为参照物,他是静止的
-
10、2017年9月1日起,浙江高速正式启用区间测速,这加大了对超速违法行为的打击力度。已知某直线区间测速区域总长度为 , 规定区间平均速度不能超过80km/h,一辆汽车以的车速驶入区间测速区域,匀速行驶了4s后司机发现系统显示若汽车继续以该速度行驶会超过规定平均速度,因此马上做匀减速运动至某一速度v后立刻以相同大小的加速度做匀加速直线运动,当恢复到原来速度的瞬间汽车刚好出区间测速区域且系统显示平均速度为80km/h,求:
(1)汽车匀加速的时间t;
(2)汽车匀减速结束后的速度v;
(3)汽车因为区间测速而增加的行驶时间(结果可用分数表示)。

-
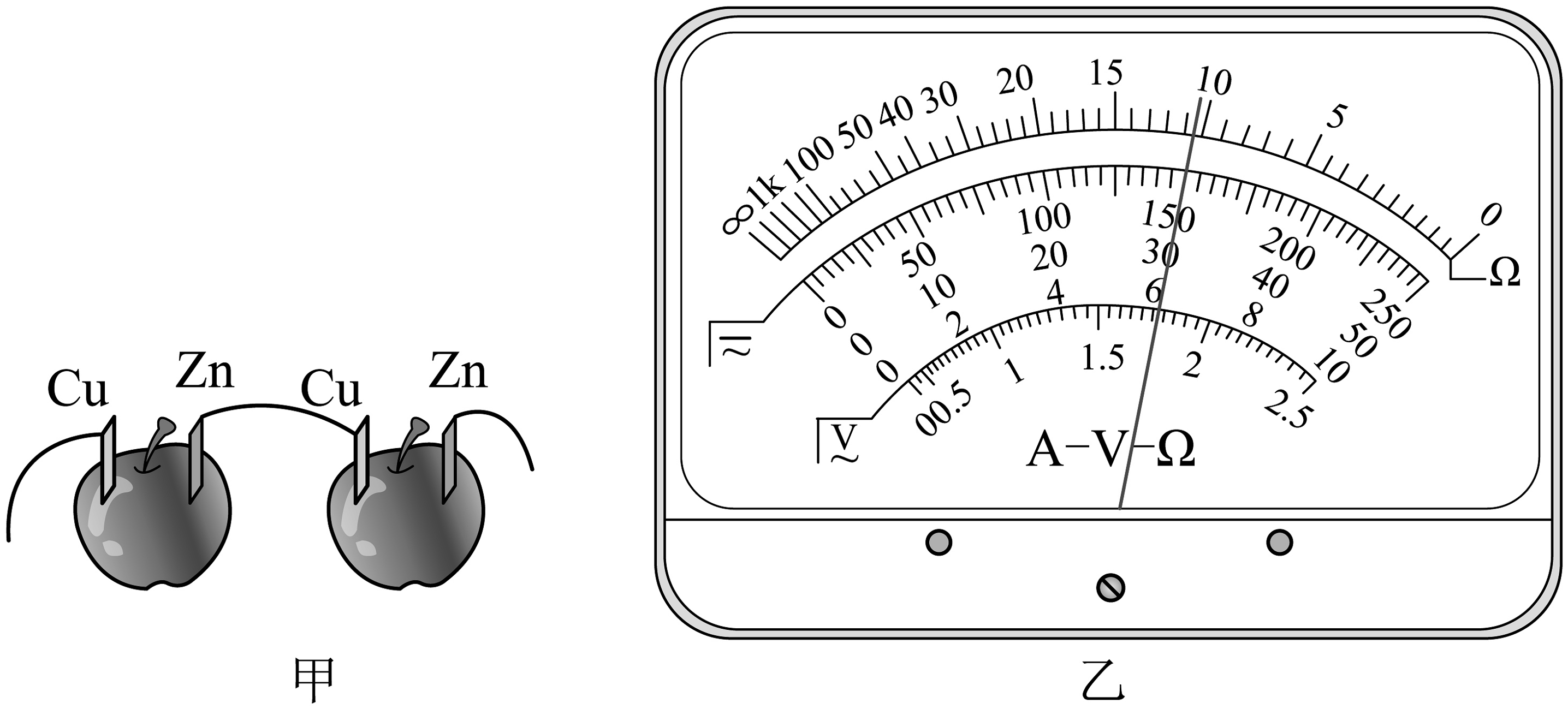
11、如图甲所示为一物理兴趣小组制作的水果电池组,为了准确测量该电池组的电动势和内阻,进行了以下操作:
(1)该小组先用多用电表直流挡粗略测量水果电池组的电动势,电表指针如图乙所示,则电表的读数为V;
(2)为了更准确地测量水果电池组的电动势和内阻,实验室提供了以下器材:
A.待测水果电池组(内阻约为)
B.电流表A(0~5mA,内阻为)
C.电压表(0~3V,内阻约为)
D.电压表(0~15V,内阻约为)
E.滑动变阻器()
F.滑动变阻器()
G.开关、导线各若干

①应该选择的实验电路是图中的(选填“丙”或“丁”);
②实验中电压表应选(填“”或“”),滑动变阻器应选(填“”或“”);
(3)确定好的电路后,调节滑动变阻器滑片位置以得到电压表的示数U与电流表的示数I的多组数据,作出图像如图戊所示,根据图像和题中所给信息可知该水果电池组的电动势V,内电阻。(结果均保留三位有效数字)

-
12、如图所示,上下两平行金属板长与竖直间距均为L,两板构成一个平行板电容器,现将一带电量为 , 质量为m的粒子以水平速度v从图中紧靠上极板位置进入电场。已知两金属板极之间的电压恒为 , 不计粒子所受重力,下列说法正确的是( )
 A、粒子出电场时的速度大小为 B、整个运动过程中粒子减少的电势能为 C、粒子穿出电场的位移为 D、若将该粒子从距离上极板处以相同速度释放,粒子将无法出电场
A、粒子出电场时的速度大小为 B、整个运动过程中粒子减少的电势能为 C、粒子穿出电场的位移为 D、若将该粒子从距离上极板处以相同速度释放,粒子将无法出电场 -
13、如图为宁波江北万象城的摩天轮,乘客随着摩天轮在竖直平面内做匀速圆周运动,则下列说法正确的是( )
 A、摩天轮转动过程中,乘客的速度和加速度都不变 B、摩天轮转动过程中,乘客的机械能守恒 C、乘客在最高点处于超重状态 D、乘客在摩天轮转到最高点与最低点时重力的功率均为0
A、摩天轮转动过程中,乘客的速度和加速度都不变 B、摩天轮转动过程中,乘客的机械能守恒 C、乘客在最高点处于超重状态 D、乘客在摩天轮转到最高点与最低点时重力的功率均为0 -
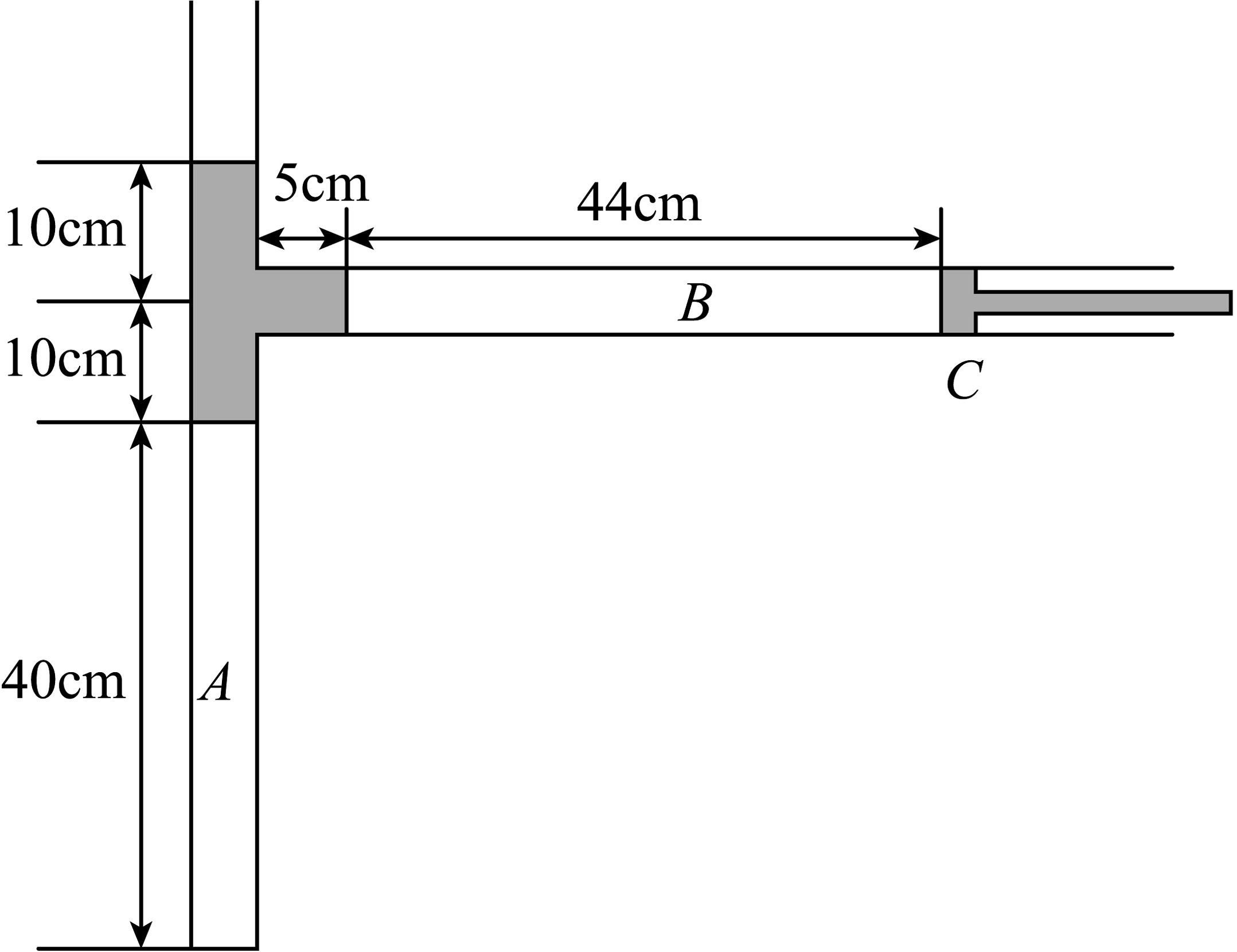
14、如图所示,内径相同,导热良好的“T”形细玻璃管上端开口,下端封闭,管中用水银封闭着A、B两部分理想气体,C为轻质密闭活塞,各部分长度如图。现缓慢推动活塞,将水平管中水银恰好全部推进竖直管中,已知大气压强 , 设外界温度不变。水平管中水银恰好全部推进竖直管中时,求:
(1)气体A的压强;
(2)气体A的气柱长度;
(3)活塞移动的距离为多大?
-
15、请阅读下述文字,完成以下各题。
把电源、电阻、电压表、开关及导线连接成如图所示的电路。已知电阻R=3.0 Ω,电源的内阻r= 0.60 Ω。闭合开关S后,电压表示数为3.00 V。
 (1)、闭合开关S后,通过电阻R的电流为( )A、1.0 A B、2.0 A C、3.0 A D、4.0 A(2)、闭合开关S后,电阻R消耗的电功率为( )A、1.0 W B、2.0 W C、3.0 W D、4.0 W(3)、电源的电动势为( )A、1.0 V B、1.5 V C、2.0 V D、3.6 V
(1)、闭合开关S后,通过电阻R的电流为( )A、1.0 A B、2.0 A C、3.0 A D、4.0 A(2)、闭合开关S后,电阻R消耗的电功率为( )A、1.0 W B、2.0 W C、3.0 W D、4.0 W(3)、电源的电动势为( )A、1.0 V B、1.5 V C、2.0 V D、3.6 V -
16、如图,在坐标系的第二象限存在匀强磁场,磁场方向垂直于平面向里;第三象限内有沿轴正方向的匀强电场;第四象限的某圆形区域内存在一垂直于平面向里的匀强磁场,磁感应强度大小为第二象限磁场磁感应强度的倍。一质量为、带电荷量为的粒子以速率自轴的A点斜射入磁场,经轴上的点以沿轴负方向的速度进入电场,然后从轴负半轴上的点射出,最后粒子以沿着轴正方向的速度经过轴上的点。已知 , , , , 不计粒子重力。
(1)求第二象限磁感应强度的大小;
(2)求粒子由至过程所用的时间;
(3)试求粒子在第四象限圆形磁场区域的轨迹半径、及该圆形磁场区域的最小面积。

-
17、静电喷漆技术具有效率高,浪费少,质量好,有利于工人健康等优点,其装置示意图如图所示。A、B为两块平行金属板,间距 , 两板间有方向由B指向A、电场强度的匀强电场。在A板的中央放置一个安全接地的静电油漆喷枪P,油漆喷枪的半圆形喷嘴可向各个方向均匀地喷出带电油漆微粒,油漆微粒的质量、电荷量为 , 喷出的初速度。油漆微粒最后都落在金属板B上。微粒所受重力和空气阻力以及微粒之间的相互作用力均可忽略。试求:
(1)微粒落在B板上的动能;
(2)微粒从离开喷枪后到达B板所需的最短时间;
(3)微粒最后落在B板上所形成图形的面积。

-
18、用一根轻绳,吊一质量为m的带电小球,放在如图所示垂直纸面向里的匀强磁场中,将小球拉到与悬点右侧等高处由图示位置静止释放,小球便在垂直于磁场的竖直面内摆动,当小球第一次摆到最低点时,悬线的张力恰好为零(重力加速度为g),则:
(1)小球带正电还是负电?
(2)小球第一次摆到最低点时的洛伦兹力多大?
(3)小球第二次经过最低点时,悬线对小球的拉力多大?

-
19、小梦同学自制了一个两档位(“”“”)的欧姆表,其内部结构如图所示,为调零电阻(最大阻值为),、、为定值电阻(),电流计G的内阻为。用此欧姆表测量一待测电阻的阻值,回答下列问题:

(1)短接①②,将单刀双掷开关与接通,电流计G示数为;保持电阻滑片位置不变,将单刀双掷开关与接通,电流计G示数变为 , 则(填“大于”或“小于”);
(2)将单刀双掷开关与接通,此时欧姆表的档位为(填“”或“”);
(3)若从“”档位换成“”档位,调整欧姆零点(欧姆零点在电流计G满偏刻度处)时,调零电阻的滑片应该调节(填“向上”或“向下”);
(4)在“”档位调整欧姆零点后,在①②间接入阻值为的定值电阻 , 稳定后电流计G的指针偏转到满偏刻度的;取走 , 在①②间接入待测电阻 , 稳定后电流计G的指针偏转到满偏刻度的 , 则。
-
20、如图所示的电路中,若把小型直流电动机接入电压为的电路中时,电动机不转,测得流过电动机的电流是;若把电动机接入的电路中,电动机正常工作,工作电流是 , 则( )
 A、电动机线圈内阻为 B、电动机正常工作时的输入功率为 C、电动机正常工作时的热功率为 D、电动机正常工作时的输出功率为
A、电动机线圈内阻为 B、电动机正常工作时的输入功率为 C、电动机正常工作时的热功率为 D、电动机正常工作时的输出功率为