-
1、如图,用水平力将质量为的物体紧压在竖直墙上,物体静止不动,物体与墙壁之间的动摩擦因数为 , 重力加速度大小为g,下列说法正确的是( )
 A、物体所受的摩擦力和重力是一对相互作用力 B、物体对墙壁的摩擦力大小为mg C、物体对墙壁的摩擦力大小为 D、水平力增大,物体所受的摩擦力也增大
A、物体所受的摩擦力和重力是一对相互作用力 B、物体对墙壁的摩擦力大小为mg C、物体对墙壁的摩擦力大小为 D、水平力增大,物体所受的摩擦力也增大 -
2、在如图所示的U-I图像中,直线Ⅰ为某一电源的路端电压与电流的关系图像,直线Ⅱ为某一电阻R的伏安特性曲线。用该电源与电阻R组成闭合电路,由图像可知下列说法正确的是( )
 A、电源的电动势为6V B、电阻R的阻值为1Ω C、电源的内阻为2Ω D、电源的输出功率为6W
A、电源的电动势为6V B、电阻R的阻值为1Ω C、电源的内阻为2Ω D、电源的输出功率为6W -
3、两辆汽车A、B在同一平直的公路上行驶,运动过程中位移(x)—时间(t)图像如图所示,根据图像,以下分析错误的是( )
 A、A、B两质点的出发点相距 B、A、B两质点同时向同一方向运动 C、在运动过程中,A质点比B质点运动的快 D、当时,A、B两质点的速度大小相等
A、A、B两质点的出发点相距 B、A、B两质点同时向同一方向运动 C、在运动过程中,A质点比B质点运动的快 D、当时,A、B两质点的速度大小相等 -
4、如图所示,一根长0.8m的直杆AO竖直放置,现有一内径略大于杆直径的环,从杆的上端点A向下滑动,杆上B点到A的距离为0.6m,取杆的下端点O为坐标原点,以竖直向下为正方向建立坐标系。则下列说法正确的是( )
 A、A点坐标为0.8m B、B点坐标为0.2m C、环从B点到O点的位移为0.2m D、环从A点到B点的位移为
A、A点坐标为0.8m B、B点坐标为0.2m C、环从B点到O点的位移为0.2m D、环从A点到B点的位移为 -
5、一汽车以初速度v0开始刹车做匀减速直线运动直到停止,前4s内位移40m,后5s内的位移25m,则下列说法正确的是( )A、该汽车从刹车到停止的平均速度为7m/s B、该汽车从刹车到停止的平均速度约为 C、该汽车速度每经过1s减小2m/s D、该汽车第8s的速度大小为2m/s
-
6、如图所示,在水平面上固定着四个完全相同的木块,一粒子弹以水平速度射入。若子弹在木块中做匀减速直线运动,当穿透第四个木块(即D位置)时速度恰好为零,下列说法正确的是( )
 A、子弹从O运动到D全过程的平均速度等于B点的瞬时速度 B、子弹通过每一部分时,其速度变化量相同 C、子弹到达各点的速率 D、子弹从进入每个木块到到达各点经历的时间
A、子弹从O运动到D全过程的平均速度等于B点的瞬时速度 B、子弹通过每一部分时,其速度变化量相同 C、子弹到达各点的速率 D、子弹从进入每个木块到到达各点经历的时间 -
7、如图所示,AB为斜面轨道,倾斜角θ=37°,AC部分光滑,CB部分粗糙,动摩擦因数为0.5。斜面轨道与半径R=1m,圆心角为143°的竖直光滑圆弧形轨道BP相切于B点,P点在O点的正上方。轻弹簧一端固定在A点,另一自由端在斜面上C点处,现有一质量m=2kg的物块在外力作用下将弹簧缓慢压缩1m到D点后(不拴接)释放,经过C点时的速度为8m/s,物块刚好能运动到P点,已知sin37°=0.6,cos37°=0.8,g=10m/s2 , 求∶
(1)物体运动到达B点的速度;
(2)B、C两点间的距离;
(3)物块从D点运动到C点的过程中,弹簧对物块所做的功。

-
8、2020年12月1日,嫦娥五号着陆器和上升器组合体从距离月球表面较低高度处开始实施制动力下降,逐步将组合体相对月球速度从降为零,成功地降落在月球表面。已知嫦娥五号着陆器和上升器组合体的质量为m,月球质量为M,月球半径为R,引力常量为G,月球可视为质量分布均匀的球体,忽略月球自转,求:
(1)月球表面的重力加速度和月球的第一宇宙速度;
(2)嫦娥五号着陆器和上升器组合体实施制动力下降过程中克服发动机平均推力所做的功。
-
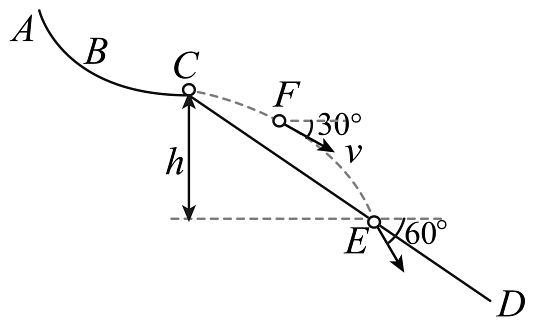
9、2022年北京冬奥会自由式滑雪大跳台比赛中,运动员在空中的运动简化为平抛运动,运动员经助滑道ABC,从C点水平飞出,然后落至着陆坡CD上的E点,若通过空中F点的速度为v,且与水平方向夹角为 , 落在E点的速度与水平方向夹角为。重力加速度为g,运动员及装备总质量为m,不计空气阻力。求:
(1)在C点的速度vC;
(2)C点与E点的高度差h;
(3)落在E点时重力的瞬时功率P。
-
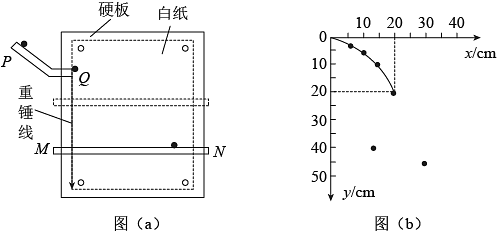
10、用如图(a)所示的装置研究平抛运动。将白纸和复写纸对齐重叠并固定在硬板上。钢球沿斜槽轨道PQ滑下后从Q点飞出,落在水平挡板MN上。由于挡板靠近硬板一侧较低,钢球落在挡板上时,钢球侧面会在白纸上挤压出一个痕迹点,在如图(b)所示的白纸上建立以抛出点为坐标原点、水平方向为x轴、竖直方向为y轴的坐标系(已知g=10m/s2)。
(1)下列说法正确的是。
A.斜槽轨道必须光滑,且小球每次要从斜槽同一位置由静止释放
B.需调节斜槽,保证其末端水平
C.需调节硬板,保证硬板在竖直平面内
D.本实验必需的器材还有刻度尺和秒表
(2)在图(b)中实验记录到有一个位置明显发生偏差的点,其产生的原因可能是:该次实验时,小球在斜槽释放的位置与其它几次相比偏(“高”或“低”)。
(3)根据图(b)记录的点可求得钢球平抛的初速度大小为m/s(结果保留两位有效数字)。
-
11、某中子星的质量 , 半径 , 引力常量 , 则此中子星表面的重力加速度是;一颗小卫星贴近这颗中子星表面沿圆轨道运动的速度是。
-
12、如图所示,质量为m的物体在水平传送带上由静止释放,传送带由电动机带动,始终保持以速度v匀速运动,物体与传送带间的动摩擦因数为μ,物体过一会儿能保持与传送带相对静止,对于物体从静止释放到相对静止这一过程,下列说法正确的是
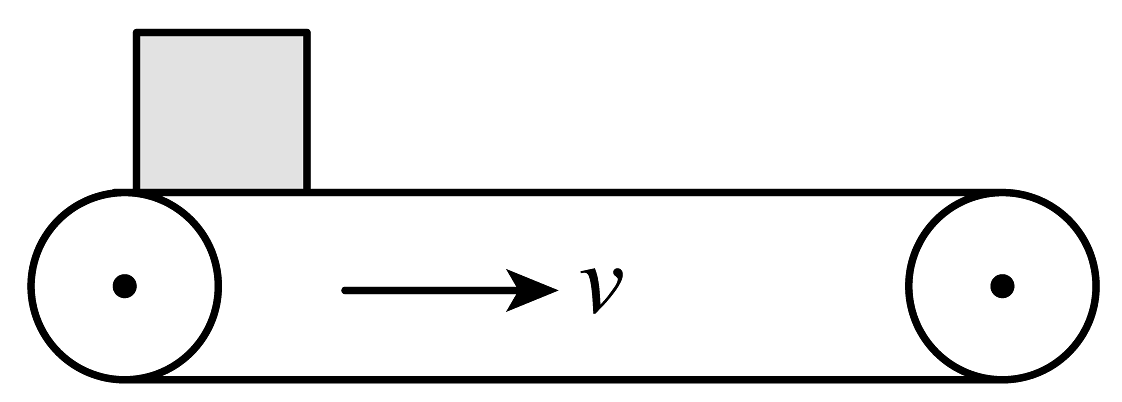 A、电动机多做的功为mv2 B、物体在传送带上的划痕长 C、传送带克服摩擦力做的功为mv2 D、电动机增加的功率为μmgv
A、电动机多做的功为mv2 B、物体在传送带上的划痕长 C、传送带克服摩擦力做的功为mv2 D、电动机增加的功率为μmgv -
13、蹦床比赛中运动员从最高点下落过程可简化为下述物理模型:如图,运动员从O点自由下落到轻弹簧床上a位置开始与轻弹簧接触,此时向下压缩弹簧。运动员运动到b处时,轻弹簧对运动员的弹力与运动员的重力平衡。运动员运动到c处时,到达最低点。不计空气阻力,下列说法正确的是( )
 A、由O向a运动的过程中运动员处于完全失重状态,其机械能减少 B、由a向b运动的过程中运动员处于失重状态,其机械能减少 C、由a向b运动的过程中运动员处于超重状态,其动能增加 D、由b向c运动的过程中运动员处于超重状态,其机械能减少
A、由O向a运动的过程中运动员处于完全失重状态,其机械能减少 B、由a向b运动的过程中运动员处于失重状态,其机械能减少 C、由a向b运动的过程中运动员处于超重状态,其动能增加 D、由b向c运动的过程中运动员处于超重状态,其机械能减少 -
14、一同学将小球从地面以100J的初动能竖直向上抛出,上升时经过A点,动能减少20J,重力势能增加12J。设空气阻力大小不变,小球可视为质点,以地面为零势能面,则( )A、小球所受重力大小是空气阻力大小的1.5倍 B、到达最高点时,小球的重力势能100J C、落回地面前瞬间,小球机械能为25J D、下降过程,小球的动能和重力势能相等时其动能为15J
-
15、如图,圆盘在水平面内以角速度ω绕中心轴匀速转动,圆盘上距轴r处有一质量为m的小物体随着圆盘一起转动;某时刻开始圆盘做减速转动直到停止,物体相对圆盘始终保持静止。则在圆盘做减速运动过程中,下列说法正确的是( )
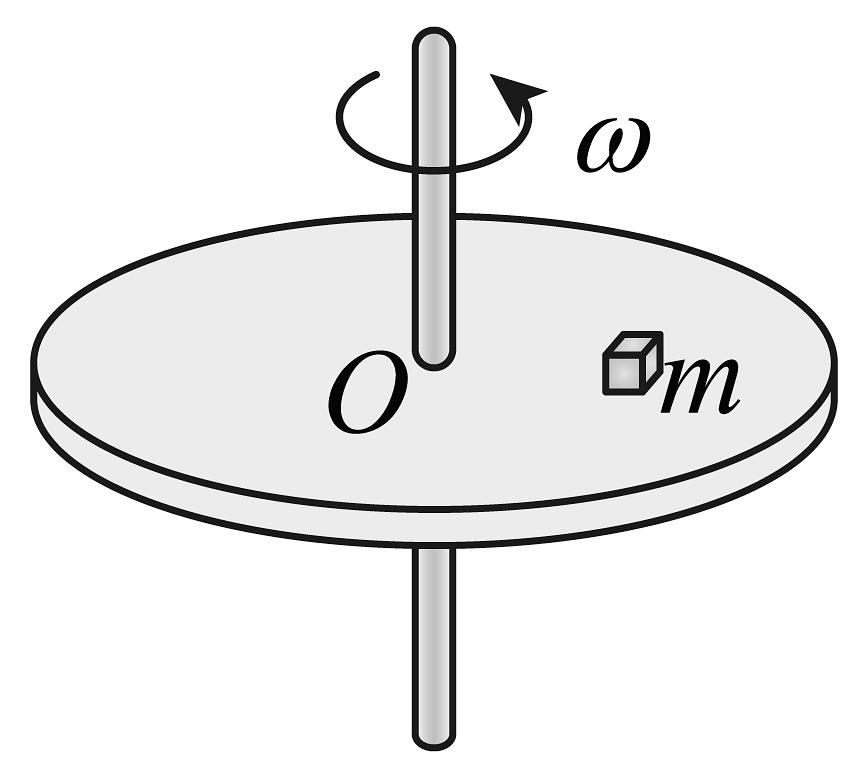 A、小物体所受摩擦力的方向仍沿半径方向 B、小物体所受摩擦力的方向与半径垂直 C、小物体所需要的向心力小于物体的合力 D、小物体克服摩擦力所做的功为
A、小物体所受摩擦力的方向仍沿半径方向 B、小物体所受摩擦力的方向与半径垂直 C、小物体所需要的向心力小于物体的合力 D、小物体克服摩擦力所做的功为 -
16、如图所示,光滑小球串在三杆夹角均为的Y形杆上,三杆结点为O,Y形杆的一杆竖直,并绕该竖直杆匀速旋转,使小球维持在距O点l处,重力加速度为g,则Y形杆旋转的角速度为( )
 A、 B、 C、 D、
A、 B、 C、 D、 -
17、质量为m的汽车在一山坡上行驶,下坡时关掉油门,汽车速度保持不变;若汽车保持恒定功率P下坡,速度由增至需要的时间为( )A、 B、 C、 D、
-
18、如图所示,汽车通过绳子绕过定滑轮连接重物M一起运动,不计滑轮摩擦和绳子质量,已知汽车以匀速向左运动,重物的速度用表示。则( )
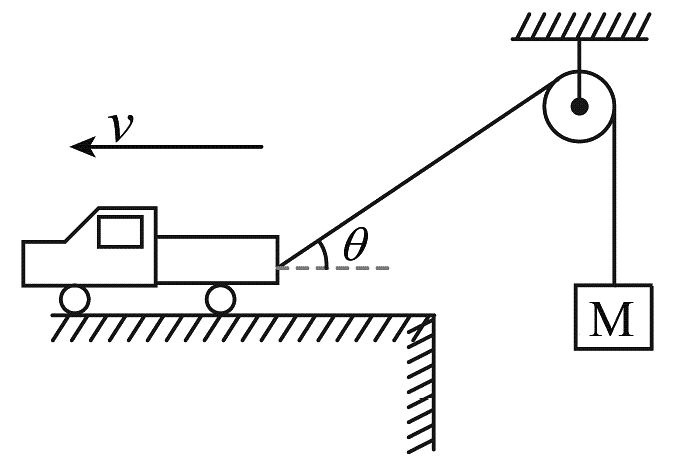 A、绳子的对M拉力恒定 B、汽车的功率恒定 C、 D、
A、绳子的对M拉力恒定 B、汽车的功率恒定 C、 D、 -
19、一辆汽车由静止开始沿平直公路行驶,汽车所受牵引力F随时间t变化关系图线如图所示。若汽车的质量为1.2×103kg,阻力恒定,汽车发动机的最大功率恒定,则以下说法正确的是( )
 A、汽车先做匀加速运动,然后再做匀速直线运动 B、汽车运动的最大速度是25m/s C、汽车发动机的最大功率为3×104W D、汽车匀加速运动阶段的加速度为1.25m/s2
A、汽车先做匀加速运动,然后再做匀速直线运动 B、汽车运动的最大速度是25m/s C、汽车发动机的最大功率为3×104W D、汽车匀加速运动阶段的加速度为1.25m/s2 -
20、如图所示,四个相同的小球在距地面相同的高度处以相同的速率分别竖直下抛、竖直上抛、平抛和斜抛,不计空气阻力,则下列关于这四个小球从抛出到落地过程的说法中正确的是 ( )
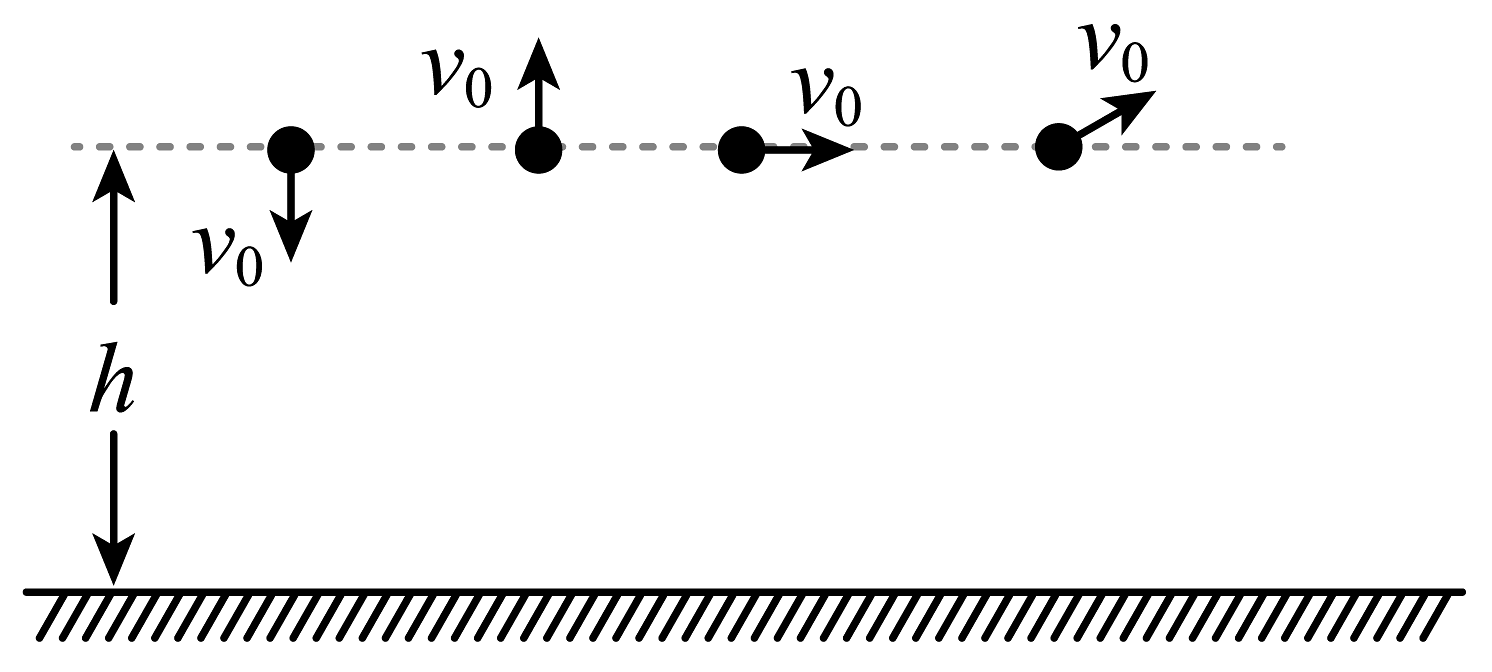 A、小球飞行过程中单位时间内的速率变化量相同 B、从开始运动至落地,重力对小球做功的平均功率相同 C、小球落地时,重力的瞬时功率相同 D、从开始运动至落地,重力对小球做功相同
A、小球飞行过程中单位时间内的速率变化量相同 B、从开始运动至落地,重力对小球做功的平均功率相同 C、小球落地时,重力的瞬时功率相同 D、从开始运动至落地,重力对小球做功相同