-
1、人造地球卫星B的质量是A的9倍,某时刻,A、B同时位于各自椭圆轨道的近地点,此时A、B所受到地球的万有引力大小相等。此后当A第四次经过其轨道的近地点时,B恰好第一次经过其轨道的远地点。已知A的近、远地点到地球球心距离分别为r和2r。则B的远地点到地球球心的距离为( )A、 B、 C、 D、
-
2、研究光电效应的电路如图所示,闭合开关用某单色光束照射K极,电路中光电流为0,则( )
 A、光束频率一定小于K极的截止频率 B、滑片P向左移动,电流可能不为0 C、滑片P向右移动,电流一定不为0 D、增大光束的照射强度,电流不为0
A、光束频率一定小于K极的截止频率 B、滑片P向左移动,电流可能不为0 C、滑片P向右移动,电流一定不为0 D、增大光束的照射强度,电流不为0 -
3、如图,截面为等腰直角三角形的棱镜置于空气中,顶角为 , 一光线从左侧入射后经两次折射,从右侧射出。入射光、出射光与左、右侧腰的夹角相等,且出射光与入射光的偏折角为。则棱镜的折射率为( )
 A、 B、 C、 D、
A、 B、 C、 D、 -
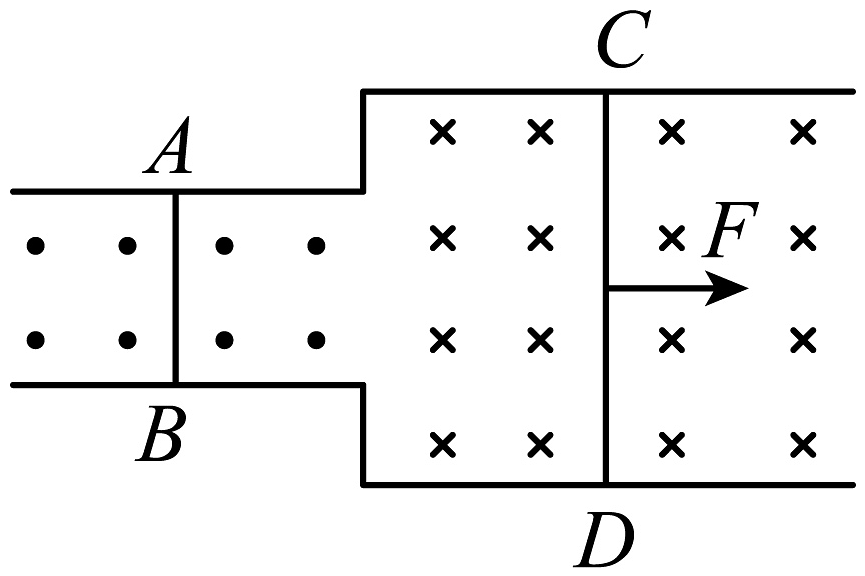
4、图示的装置中,电场强度E和磁感应强度B垂直,这种装置叫速度选择器。若一电子恰能沿虚线从左向右运动。下列和电子速率相同的哪种粒子沿虚线射入,不能沿虚线运动( )
 A、从左向右运动的质子 B、从右向左运动的质子 C、从左向右运动的中子 D、从右向左运动的中子
A、从左向右运动的质子 B、从右向左运动的质子 C、从左向右运动的中子 D、从右向左运动的中子 -
5、初动能相同的两个物体,在同一水平面上运动,因摩擦力的作用而停止。若两物体与水平面的动摩擦因数相同,下列说法正确的是( )A、质量较大的物体滑行的时间较短 B、质量较大的物体滑行的距离较长 C、质量较小的物体滑行的时间较短 D、质量较小的物体滑行的距离较短
-
6、某眼动仪可以根据其微型线圈在磁场中随眼球运动时所产生的电流来追踪眼球的运动。若该眼动仪线圈面积为S,匝数为N,处于磁感应强度为B的匀强磁场中,线圈平面最初平行于磁场,经过时间t后线圈平面逆时针转动至与磁场夹角为θ处,则在这段时间内,线圈中产生的平均感应电动势的大小和感应电流的方向(从左往右看)为( )
 A、 , 逆时针 B、 , 逆时针 C、 , 顺时针 D、顺时针
A、 , 逆时针 B、 , 逆时针 C、 , 顺时针 D、顺时针 -
7、如图所示,在第一象限存在垂直x轴向上的匀强电场,在x轴下方有垂直xOy平面向外的匀强磁场,电场强度大小为E,磁感应强度大小为B,一负粒子的质量为m、电荷量为q,从坐标原点沿y轴负半轴以速度v开始运动,不计粒子受到的重力,求:
(1)粒子纵坐标的最大值ym;
(2)粒子第5次经过x轴正半轴时运动的总时间t;
(3)粒子第n次经过x轴正半轴时运动的总路程s。

-
8、如图所示,两根质量均为m的金属棒垂直地放在光滑的水平导轨上,左、右两部分导轨间距之比为1:2,AB棒长度为L,CD棒长度为2L,导轨间左、右两部分有大小相等、方向相反的匀强磁场,两棒电阻与棒长成正比,不计导轨电阻,现用水平恒力F向右拉CD棒,使CD棒向右运动,导轨足够长,磁场区域足够大。下列说法正确的是( )
 A、稳定后,AB棒向左匀加速运动,CD棒向右匀加速运动,且AB棒的加速度大小是CD棒的加速度大小的2倍 B、稳定后,AB棒向左匀速运动,CD棒向右匀速运动,且AB棒的速度大小是CD棒的速度大小的2倍 C、如果F作用一段时间后,AB棒和CD棒的速度大小均为v,此时立即撤去拉力F后,CD棒的最终速度大小为 , 方向向右 D、当AB棒和CD棒的速度大小均为v时,撤去拉力F后,整个回路产生的焦耳热为
A、稳定后,AB棒向左匀加速运动,CD棒向右匀加速运动,且AB棒的加速度大小是CD棒的加速度大小的2倍 B、稳定后,AB棒向左匀速运动,CD棒向右匀速运动,且AB棒的速度大小是CD棒的速度大小的2倍 C、如果F作用一段时间后,AB棒和CD棒的速度大小均为v,此时立即撤去拉力F后,CD棒的最终速度大小为 , 方向向右 D、当AB棒和CD棒的速度大小均为v时,撤去拉力F后,整个回路产生的焦耳热为 -
9、如图,以9.8m/s的水平初速度v0抛出的物体,飞行一段时间后,垂直地撞在倾角θ为30°的斜面上,则物体完成这段飞行的时间是(取g=9.8m/s2)( )
 A、 B、 C、 D、2s
A、 B、 C、 D、2s -
10、如图所示,水平面内有两根间距为d的光滑平行导轨,右端接有电容为C的电容器。一质量为m的导体棒固定于导轨上某处,轻绳一端连接导体棒,另一端绕过定滑轮下挂一质量为M的物块。由静止释放导体棒,物块下落从而牵引着导体棒向左运动。空间中存在垂直导轨平面的匀强磁场,磁场磁感应强度大小为B,不计导体棒和导轨的电阻,忽略绳与定滑轮间的摩擦。若导体棒运动过程中电容器未被击穿,导体棒始终与导轨接触良好并保持垂直,重力加速度为g,则在物块由静止下落高度为h的过程中( )
 A、物块做加速度逐渐减小的加速运动 B、物块与导体棒组成的系统减少的机械能等于导体棒克服安培力做的功 C、轻绳的拉力大小为 D、电容器增加的电荷量为
A、物块做加速度逐渐减小的加速运动 B、物块与导体棒组成的系统减少的机械能等于导体棒克服安培力做的功 C、轻绳的拉力大小为 D、电容器增加的电荷量为 -
11、流沙是一种可以流动的沙,可以轻而易举地将一些大型动物困住,但是一些小动物却可以轻松通过流沙区域。一小动物横渡流沙河,小动物的速度大小不变、方向垂直于河岸,小动物由南岸到北岸的运动轨迹如图所示。由南岸到北岸,流沙的流速( )
 A、增大 B、减小 C、先增大后减小 D、先减小后增大
A、增大 B、减小 C、先增大后减小 D、先减小后增大 -
12、如图所示,固定在水平面上的半径为r的金属圆环的总电阻为R,其内存在方向竖直向上、磁感应强度大小为B的匀强磁场。长为l的金属棒,一端与圆环接触良好,另一端固定在竖直导电转轴OO'上,随轴以角速度ω匀速转动,在圆环的A点和电刷间接有阻值为R的电阻和电容为C的电容器。不计其他电阻和摩擦,在金属棒匀速转动过程中,下列说法正确的是( )
 A、棒产生的电动势为 B、棒产生的电动势为 C、电容器所带的电荷量的最小值为 D、电容器所带的电荷量的最小值为
A、棒产生的电动势为 B、棒产生的电动势为 C、电容器所带的电荷量的最小值为 D、电容器所带的电荷量的最小值为 -
13、光滑平面右侧固定一光滑轻质定滑轮,通过轻质绝缘细线分别连接绝缘带电小滑块A和绝缘带电长滑块C(足够长),A和C的质量均为m,电荷量均为+q,A和C可在相互平行的方向上沿平面运动。开始时系统静止在水平向左、电场强度大小为E的匀强电场中。如图所示,某时刻起,长滑块C上表面有一质量为2m、带电荷量为+2q的绝缘小滑块B以初速度v0水平向右运动。已知B、C之间的滑动摩擦力大小为qE且略小于最大静摩擦力,A与C在运动过程中没有与定滑轮发生碰撞,A、B、C之间的静电力可忽略。求:
(1)初始时B和C的加速度大小;
(2)B向右的最大位移以及达到最大位移过程中静电力对整个系统所做的功。

-
14、某校物理小组尝试利用智能手机对竖直面内的圆周运动进行拓展探究。实验装置如图甲所示,轻绳一端连接拉力传感器,另一端连接智能手机,把手机拉开一定角度,由静止释放,手机在竖直面内摆动过程中,手机中的陀螺仪传感器可以采集角速度实时变化的数据并输出图像,同时,拉力传感器可以采集轻绳拉力实时变化的数据并输出图像。经查阅资料可知,面向手机屏幕,手机逆时针摆动时陀螺仪传感器记录的角速度为正值,反之为负值。
 (1)、某次实验,手机输出的角速度随时间变化的图像如图乙所示,由此可知在0~t0时间段内__________A、手机20次通过最低点 B、手机10次通过最低点 C、手机做阻尼振动 D、手机振动的周期越来越小(2)、为进一步拓展研究,分别从力传感器输出图和手机角速度—时间图中读取几对手机运动到最低点时的拉力和角速度的数据,并在坐标图中以F(单位:N)为纵坐标、ω2(单位:s-2)为横坐标进行描点,请在图中作出F-ω2的图像。
(1)、某次实验,手机输出的角速度随时间变化的图像如图乙所示,由此可知在0~t0时间段内__________A、手机20次通过最低点 B、手机10次通过最低点 C、手机做阻尼振动 D、手机振动的周期越来越小(2)、为进一步拓展研究,分别从力传感器输出图和手机角速度—时间图中读取几对手机运动到最低点时的拉力和角速度的数据,并在坐标图中以F(单位:N)为纵坐标、ω2(单位:s-2)为横坐标进行描点,请在图中作出F-ω2的图像。 (3)、根据图像求得实验所用手机的质量为kg,手机重心做圆周运动的半径为。(结果均保留两位有效数字,重力加速度9.8m/s2)
(3)、根据图像求得实验所用手机的质量为kg,手机重心做圆周运动的半径为。(结果均保留两位有效数字,重力加速度9.8m/s2) -
15、为保护消费者权益,今年3月某质检部门对市场上销售的铜质电线电缆进行抽样检查,发现部分产品不合格,经检验发现:一种是铜材使用了再生铜或含杂质较多的铜;另一种就是铜材直径比规格略小。通过查阅知道,常温下纯铜的电阻率约为。某学校实验小组也选取一段铜质电线样品进行检测,分别测量其直径和电阻率。
第一步,小组同学用螺旋测微器对铜质电线不同位置进行多次测量,发现该铜质电线的直径符合规格,其中一次测量数据如图甲所示。
第二步,为比较准确测量铜质电线的电阻,小组同学设计如图乙所示电路,并从实验室找到相应器材:
A.干电池两节(电动势约为3V,内阻约)
B.待测铜质电线Rx(长度150m,电阻约几欧姆)
C.电流表A(量程0~0.6A,内阻约)
D.电压表V(量程0~3V,内阻约3000Ω)
E.滑动变阻器R1( , 额定电流1A)
F.开关、导线若干
第三步,按照电路图连接实物,通过改变滑动变阻器的电阻,测量出多组电压和电流,描点作图得到图像如图丙所示。
 (1)、铜质电线直径的规格mm。(2)、图乙中电压表另一接线头c应该接(填“d”或“e”)。(3)、根据图丙,可求得铜质电线的电阻。(结果保留一位小数)(4)、样品铜质电线的电阻率ρ=。(结果保留一位小数)
(1)、铜质电线直径的规格mm。(2)、图乙中电压表另一接线头c应该接(填“d”或“e”)。(3)、根据图丙,可求得铜质电线的电阻。(结果保留一位小数)(4)、样品铜质电线的电阻率ρ=。(结果保留一位小数) -
16、如图所示,绝缘粗糙的水平轨道AB与处于竖直平面内的半圆形光滑绝缘轨道BC平滑连接,BC为竖直直径,半圆形轨道的半径R=0.5m,所在空间存在水平向右的匀强电场,电场线平行AB,电场强度大小E=1×104N/C。现有一电荷量q=+3×10-4C、质量m=0.2kg的带电体甲(可视为质点)与水平轨道的动摩擦因数μ=0.5,在P点由静止释放,之后与位于B点的另一质量m=0.2kg不带电的绝缘体乙(可视为质点)发生正碰并瞬间粘在一起,P点到B点的距离xPB=5m,g取10m/s2 , sin37°=0.6,cos37°=0.8。则下列说法正确的是( )
 A、甲乙粘在一起后在半圆形轨道上运动过程中机械能守恒 B、甲、乙整体运动到半圆形轨道最高点C时速度大小为 C、甲、乙整体在半圆形轨道上运动过程的最大动能为5.5J D、甲、乙整体在半圆形轨道上运动过程的最大动能为5J
A、甲乙粘在一起后在半圆形轨道上运动过程中机械能守恒 B、甲、乙整体运动到半圆形轨道最高点C时速度大小为 C、甲、乙整体在半圆形轨道上运动过程的最大动能为5.5J D、甲、乙整体在半圆形轨道上运动过程的最大动能为5J -
17、人体暴露于强烈的中子辐射中会在血浆中产生钠24,可以通过测量钠24的数量来确定患者吸收的辐射剂量。钠24具有放射性,某次研究其放射特性的实验中,将孤立钠24原子核静置于匀强磁场中,衰变后在磁场中形成两条圆周径迹,如图所示,下列说法中正确的是( )
 A、小圆对应的粒子的运动方向为逆时针方向 B、钠24发生了β衰变 C、小圆和大圆的轨道半径之比为 D、两条轨迹对应的粒子的质量之和等于衰变前钠24的质量
A、小圆对应的粒子的运动方向为逆时针方向 B、钠24发生了β衰变 C、小圆和大圆的轨道半径之比为 D、两条轨迹对应的粒子的质量之和等于衰变前钠24的质量 -
18、全球能源有近消耗在汽车行驶之中,据统计,一辆汽车以80km/h的速度行驶时,每10km耗油约1L,根据汽油热值计算,汽车消耗的功率约70kW,这70kW功率大致分配如下(分配饼图如图所示):1kW因汽油蒸发“消失”,52kW以废热排出和散热器损耗掉,剩余17kW用于汽车动力系统做功。对汽车做功的功率中,有5kW用于发动机水箱循环和空调,3kW消耗在传动装置,只有9kW到达驱动轮用以驱动汽车前行,则( )
 A、整辆汽车的总效率约13% B、汽车动力系统的效率约为47% C、汽车以80km/h的速度匀速行驶时,受到阻力约4×102N D、汽车以80km/h的速度匀速行驶时,受到阻力约7.7×102N
A、整辆汽车的总效率约13% B、汽车动力系统的效率约为47% C、汽车以80km/h的速度匀速行驶时,受到阻力约4×102N D、汽车以80km/h的速度匀速行驶时,受到阻力约7.7×102N -
19、自由式小轮车赛是一种对感官冲击强烈的极限运动,单人表演场地如图所示,两个相同等腰直角三角形斜坡间隔15m,表演者从右边斜坡顶点以的速度沿斜面方向滑出,最终落在左边斜坡的斜面上。忽略空气阻力,表演者连带装备可看作质点,g=10m/s2。下列说法中正确的是( )
 A、表演者将落在左边斜坡的顶点上 B、表演者落在左边斜坡的斜面时,速度方向沿斜面向下 C、表演者距离左边斜坡的最远距离为 D、表演者上升和下降的高度之比为
A、表演者将落在左边斜坡的顶点上 B、表演者落在左边斜坡的斜面时,速度方向沿斜面向下 C、表演者距离左边斜坡的最远距离为 D、表演者上升和下降的高度之比为 -
20、我国空间站在轨运行过程中,在通信传输方面有时需要借助于同步卫星,且两者之间距离越近信息传输保真度越高。假设空间站A和同步卫星B都在赤道平面内运动,空间站的轨道半径r1=kR,R为地球半径。已知地球自转的周期为T0 , 地表处重力加速度为g。则( )
 A、同步卫星的轨道半径 B、同步卫星的轨道半径 C、两次保真度最高的信息传输的最短时间间隔 D、两次保真度最高的信息传输的最短时间间隔
A、同步卫星的轨道半径 B、同步卫星的轨道半径 C、两次保真度最高的信息传输的最短时间间隔 D、两次保真度最高的信息传输的最短时间间隔