相关试卷
-
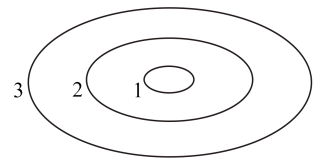
1、如图所示,一定质量的理想气体经历了、、三个过程,已知为等容过程,另外两个中一个是等温过程,另一个是绝热过程。下列说法正确的是( )
 A、过程,气体压强和体积的乘积变大 B、过程,气体压强和体积的乘积变小 C、过程,气体压强和体积的乘积变大 D、过程,气体压强和体积的乘积变小
A、过程,气体压强和体积的乘积变大 B、过程,气体压强和体积的乘积变小 C、过程,气体压强和体积的乘积变大 D、过程,气体压强和体积的乘积变小 -
2、如图所示,在空间站伸出的机械臂外端安置一微型卫星,微型卫星与空间站一起绕地球做匀速圆周运动,且微型卫星、空间站和地球中心始终位于同一直线。忽略空间站和微型卫星的尺寸及它们之间的万有引力,则( )
 A、微型卫星的线速度比空间站的小 B、微型卫星的加速度比空间站的小 C、机械臂对微型卫星的作用力大小为零 D、机械臂对微型卫星的作用力大小不为零,方向指向地心
A、微型卫星的线速度比空间站的小 B、微型卫星的加速度比空间站的小 C、机械臂对微型卫星的作用力大小为零 D、机械臂对微型卫星的作用力大小不为零,方向指向地心 -
3、如图甲为氢原子光谱,图乙为氢原子部分能级图。图甲中的Hα、Hβ、Hγ、Hδ属于巴尔末系,都是氢原子从高能级向n=2能级跃迁时产生的谱线。下列说法中正确的是( )
 A、Hβ对应的光子能量比Hγ的大 B、Hβ对应的光子动量比Hγ的大 C、Hδ是氢原子从n=3向n=2能级跃迁时产生的 D、氢原子从高能级向n=1能级跃迁时产生的谱线均在Hδ的左侧
A、Hβ对应的光子能量比Hγ的大 B、Hβ对应的光子动量比Hγ的大 C、Hδ是氢原子从n=3向n=2能级跃迁时产生的 D、氢原子从高能级向n=1能级跃迁时产生的谱线均在Hδ的左侧 -
4、1956年李政道和杨振宁提出在弱相互作用中宇称不守恒,并由吴健雄用放射源进行了实验验证,次年李、杨两人为此获得了诺贝尔物理学奖。已知的半衰期约为5.26年,其衰变方程是。其中是反中微子,它的电荷量为零,质量可忽略。下列说法中正确的是( )A、发生的是α衰变 B、X是来自原子核外的电子 C、的比结合能比的大 D、2个原子核经过10.52年一定全部发生了衰变
-
5、如图所示,在光滑绝缘水平面上同时由静止释放两个带正电的小球A和B,已知A、B两球的质量分别为m1、m2。则某时刻A、B两球( )
 A、速度大小之比为m1∶m2 B、加速度大小之比为m1∶m2 C、动量大小之比为m2∶m1 D、动能大小之比为m2∶m1
A、速度大小之比为m1∶m2 B、加速度大小之比为m1∶m2 C、动量大小之比为m2∶m1 D、动能大小之比为m2∶m1 -
6、汽缸内封闭有一定质量的气体,在某次压缩过程中,缸内气体的温度从T1迅速升高至T2。下列各图中,纵坐标f(v)表示各速率区间的分子数占总分子数的百分比,图线I、Ⅱ分别为缸内气体在T1、T2两种温度下的分子速率分布曲线,其中正确的是( )A、
 B、
B、 C、
C、 D、
D、
-
7、如图所示,长度为d的水平传送带M顺时针匀速运动。质量为m的小物块A在传送带左端M由静止释放。A还未与传送带达到相同速度时就从右端N平滑地进入光滑水平面NO,与向右运动的小物块B发生碰撞(碰撞时间极短)。碰后A、B均向右运动,从O点进入粗糙水平地面。设A与传送带间的动摩擦因数和A、B与地面间的动摩擦因数均为 , 重力加速度为g。
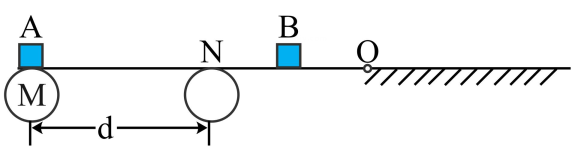 (1)、求A在传送带上的加速度大小及离开传送带时的速度大小;(2)、若碰前瞬间,B的速度大小为A的一半,碰撞为弹性碰撞,且碰后A、B在粗糙地面上停下后相距d,求B的质量;(3)、若B的质量是A的n倍,碰后瞬间A和B的动量相同,求n的取值范围及碰后瞬间B的速度大小范围。
(1)、求A在传送带上的加速度大小及离开传送带时的速度大小;(2)、若碰前瞬间,B的速度大小为A的一半,碰撞为弹性碰撞,且碰后A、B在粗糙地面上停下后相距d,求B的质量;(3)、若B的质量是A的n倍,碰后瞬间A和B的动量相同,求n的取值范围及碰后瞬间B的速度大小范围。 -
8、研究小组设计了一种通过观察粒子在荧光屏上打出的亮点位置来测量粒子速度大小的装置,如题图所示,水平放置的荧光屏上方有沿竖直方向强度大小为B,方向垂直于纸面向外的匀强磁场。0、N、M均为荧光屏上的点,且在纸面内的同一直线上,发射管K(不计长度)位于O点正上方,仅可沿管的方向发射粒子,一端发射带正电粒子,另一端发射带负电粒子,同时发射的正、负粒子速度大小相同,方向相反,比荷均为别:.已知OK=3h,: , 不计粒子所受重力及粒子间相互作用。
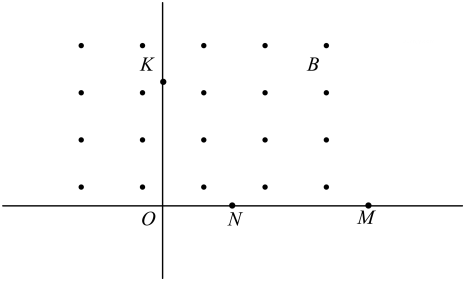 (1)、若K水平发射的粒子在0点产生光点,求粒子的速度大小。(2)、若K从水平方向逆时针旋转60°,其两端同时发射的正、负粒子恰都能在N点产生光点,求粒子的速度大小。(3)、要使(2)问中发射的带正电粒子恰好在M点产生光点,可在粒子发射时间后关闭磁场,忽略磁场变化的影响,求t。
(1)、若K水平发射的粒子在0点产生光点,求粒子的速度大小。(2)、若K从水平方向逆时针旋转60°,其两端同时发射的正、负粒子恰都能在N点产生光点,求粒子的速度大小。(3)、要使(2)问中发射的带正电粒子恰好在M点产生光点,可在粒子发射时间后关闭磁场,忽略磁场变化的影响,求t。 -
9、如图为小明设计的电容式压力传感器原理示意图,平行板电容器与绝缘侧壁构成密闭气腔。电容器上下极板水平,上极板固定,下极板质量为m、面积为S,可无摩擦上下滑动。初始时腔内气体(视为理想气体)压强为p,极板间距为d。当上下极板均不带电时,外界气体压强改变后,极板间距变为2d,腔内气体温度与初始时相同,重力加速度为g,不计相对介电常数的变化,求此时
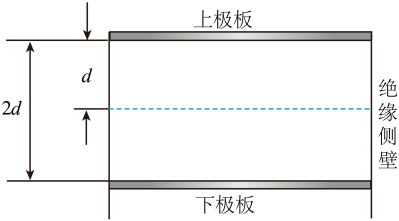 (1)、腔内气体的压强;(2)、外界气体的压强;(3)、电容器的电容变为初始时的多少倍。
(1)、腔内气体的压强;(2)、外界气体的压强;(3)、电容器的电容变为初始时的多少倍。 -
10、熄火保护装置主要由弹簧、热电偶和电磁铁等组成,其示意图如图1所示,A、B为导线上两个接线端。小组设计了如图2所的电路(部分连线未完成)进行探究,图中数字毫安表内阻约为1Ω,数字毫伏表内阻约为10MΩ。
 (1)、将图1中的A、B端分别与图2中的A、B端连接,测量热电偶和电磁铁线圈构成的组合体电阻。已知组合体电阻不超过0.05Ω,则未完成的连接中,Q端应和(填“b”或“c")处相连,理由是。正确连线后,开始时滑动变阻器的滑片应置于(填“d”或“e")端(2)、闭合开关S1、S2 , 实验测得组合体电阻为0.020Ω,当电磁铁线圈中的电流小于142mA时,电磁铁无法继续吸合衔铁,衔铁被释放。断开开关S1、S2 , 从室温加热热电偶感温端到某一温度后,停止加热,使其自然冷却至室温,测得整个过程中热电偶受热产生的电动势E随时间的变化关系如图3所示。在相同的加热和冷却过程中,如果将A、B端直接连接,不计温度变化对组合体电阻的影响,从停止加热到吸合的衔铁被释放,所用的时间约为 s(保留3位有效数字)。
(1)、将图1中的A、B端分别与图2中的A、B端连接,测量热电偶和电磁铁线圈构成的组合体电阻。已知组合体电阻不超过0.05Ω,则未完成的连接中,Q端应和(填“b”或“c")处相连,理由是。正确连线后,开始时滑动变阻器的滑片应置于(填“d”或“e")端(2)、闭合开关S1、S2 , 实验测得组合体电阻为0.020Ω,当电磁铁线圈中的电流小于142mA时,电磁铁无法继续吸合衔铁,衔铁被释放。断开开关S1、S2 , 从室温加热热电偶感温端到某一温度后,停止加热,使其自然冷却至室温,测得整个过程中热电偶受热产生的电动势E随时间的变化关系如图3所示。在相同的加热和冷却过程中,如果将A、B端直接连接,不计温度变化对组合体电阻的影响,从停止加热到吸合的衔铁被释放,所用的时间约为 s(保留3位有效数字)。
-
11、弹簧是熄火保护装置中的一个元件,其劲度系数会影响装置的性能。小组设计了如图1所示的实验装置测量弹簧的劲度系数,其中压力传感器水平放置,弹簧竖直放在传感器上,螺旋测微器竖直安装,测微螺杆正对弹簧。
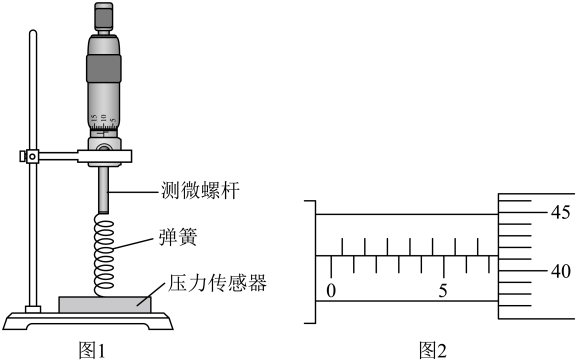 (1)、某次测量时,螺旋测微器的示数如图2所示,此时读数为mm。(2)、对测得的数据进行处理后得到弹簧弹力F与弹簧长度l的关系如图3所示,由图可得弹簧的劲度系数为N/m,弹簧原长为mm(均保留3位有效数字)。
(1)、某次测量时,螺旋测微器的示数如图2所示,此时读数为mm。(2)、对测得的数据进行处理后得到弹簧弹力F与弹簧长度l的关系如图3所示,由图可得弹簧的劲度系数为N/m,弹簧原长为mm(均保留3位有效数字)。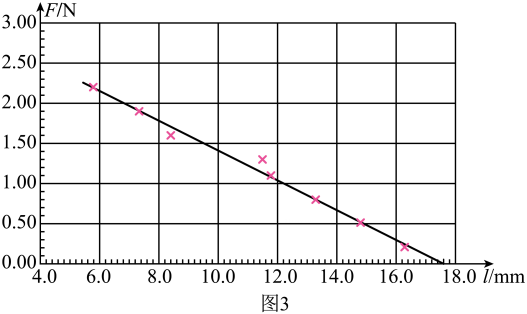
-
12、如图1所示,小明设计的一种玩具小车由边长为d的正方形金属框efgh做成,小车沿平直绝缘轨道向右运动,轨道内交替分布有边长均为d的正方形匀强磁场和无磁场区域,磁场区域的磁感应强度大小为B,方向竖直向上。gh段在磁场区域运动时,受到水平向右的拉力 , 且gh两端的电压随时间均匀增加;当gh在无磁场区域运动时,。gh段速度大小v与运动路程S的关系如图2所示,图中为gh每次经过磁场区域左边界时速度大小,忽略摩擦力。则( )
 A、gh在任一磁场区域的运动时间为 B、金属框的总电阻为 C、小车质量为 D、小车的最大速率为
A、gh在任一磁场区域的运动时间为 B、金属框的总电阻为 C、小车质量为 D、小车的最大速率为 -
13、2025年1月“疆电入渝”工程重庆段全线贯通,助力重庆形成特高压输电新格局,该工程计划将输电站提供的直流电由新疆输送至重庆,多次转换后变为的交流电,再经配电房中的变压器(视为理想变压器)降为的家用交流电,若输电线路输送功率为 , 且直流输电过程中导线电阻产生的电功率损耗不超过输送功率的5%,则( )A、直流输电导线中的电流为250A B、直流输电导线总阻值不超过16Ω C、家用交流电的电压最大值为220V,频率为50Hz D、配电房中变压器原、副线圈中电流比为
-
14、一浮筒(视为质点)在池塘水面以频率f上下振动,水面泛起圆形的涟漪(视为简谐波)。用实线表示波峰位置,某时刻第1圈实线的半径为r,第3圈实线的半径为9r,如图所示,则( )
 A、该波的波长为4r B、该波的波速为2fr C、此时浮筒在最低点 D、再经过 , 浮筒将在最低点
A、该波的波长为4r B、该波的波速为2fr C、此时浮筒在最低点 D、再经过 , 浮筒将在最低点 -
15、“金星凌日”时,从地球上看,金星就像镶嵌在太阳表面的小黑点。在地球上间距为d的两点同时观测,测得金星在太阳表面的小黑点相距为L,如图所示。地球和金星绕太阳的运动均视为匀速圆周运动,太阳直径远小于金星的轨道半径,则地球和金星绕太阳运动的( )
 A、轨道半径之比为 B、周期之比为 C、线速度大小之比为 D、向心加速度大小之比为
A、轨道半径之比为 B、周期之比为 C、线速度大小之比为 D、向心加速度大小之比为 -
16、在科学实验中可利用激光使原子减速,若一个处于基态的原子朝某方向运动,吸收一个沿相反方向运动的能量为E的光子后跃迁到相邻激发态,原子速度减小,动量变为p。普朗克常量为h,光速为c,则( )A、光子的波长为 B、该原子吸收光子后质量减少了 C、该原子吸收光子后德布罗意波长为 D、一个波长更长的光子也能使该基态原子跃迁到激发态
-
17、某兴趣小组用人工智能模拟带电粒子在电场中的运动,如图所示的矩形区域OMPQ内分布有平行于OQ的匀强电场,N为QP的中点。模拟动画显示,带电粒子a、b分别从Q点和O点垂直于OQ同时进入电场,沿图中所示轨迹同时到达M、N点,K为轨迹交点。忽略粒子所受重力和粒子间的相互作用,则可推断a、b( )
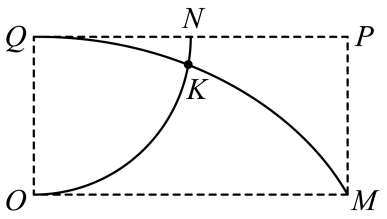 A、具有不同比荷 B、电势能均随时间逐渐增大 C、到达M、N的速度大小相等 D、到达K所用时间之比为
A、具有不同比荷 B、电势能均随时间逐渐增大 C、到达M、N的速度大小相等 D、到达K所用时间之比为 -
18、杨氏双缝干涉实验中,双缝与光屏距离为l,波长为的激光垂直入射到双缝上,在屏上出现如图所示的干涉图样。某同学在光屏上标记两条亮纹中心位置并测其间距为a,则( )
 A、相邻两亮条纹间距为 B、相邻两暗条纹间距为 C、双缝之间的距离为 D、双缝之间的距离为
A、相邻两亮条纹间距为 B、相邻两暗条纹间距为 C、双缝之间的距离为 D、双缝之间的距离为 -
19、“魔幻”重庆的立体交通屋叠交错,小明选取其中两条线探究车辆的运动。如图所示,轻轨列车与汽车以速度分别从M和N向左同时出发,列车做匀速直线运动,汽车在长为S的NO段做匀减速直线运动并以速度进入半经为R的OP圆孤段做匀速图周运动。两车均视为质点,则( )
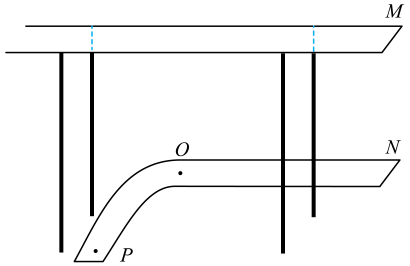 A、汽车到O点时,列车行驶践离为S B、汽车到O点时,列车行驶距离为 C、汽车在OP段向心加速度大小为 D、汽车在OP段向心加速度大小为
A、汽车到O点时,列车行驶践离为S B、汽车到O点时,列车行驶距离为 C、汽车在OP段向心加速度大小为 D、汽车在OP段向心加速度大小为 -
20、易碎物品运输中常采用缓冲气袋减小运输中冲击。若某次撞击过程中,气袋被压缩(无破损),不计袋内气体与外界的热交换,则该过程中袋内气体(视为理想气体)( )A、分子热运动的平均动能增加 B、内能减小 C、压强减小 D、对外界做正功