相关试卷
- 浙江省温州市十五校联合体2017-2018学年高二上学期期中联考通用技术试卷
- 浙江省桐乡市2016-2017学年高一下学期通用技术期中考试试卷
- 浙江省杭州市萧山区2016届通用技术高考模拟试卷(三)
- 浙江省慈溪市云龙中学2013-2014学年高一下学期通用技术期中联考试卷
- 浙江省2018届高三上学期通用技术选考试题
- 浙江省“七彩阳光”新高考研究联盟2017届高三下学期通用技术期初联考试卷
- 浙江省温州市2016年3月普通高中学业水平通用技术模拟考试试卷
- 浙江省2014年普通高中学业水平考试通用技术试卷
- 浙江省2015年9月普通高等学校招生统一考试通用技术试卷
- 浙江省2015年学业水平考试通用技术模拟试卷(二)
-
1、小明准备在通用技术实践课上用钢板制作如图所示的连接件。以下的做法中合理的是( )
 A、腰圆孔加工,可以用钢丝锯直接锯出后再锉削 B、划线时,先划基准线,再划中心线,后划外轮廓 C、只需要用平锉和圆锉即可完成锉削 D、虚线框1加工,应先锯割再锉削,后钻孔
A、腰圆孔加工,可以用钢丝锯直接锯出后再锉削 B、划线时,先划基准线,再划中心线,后划外轮廓 C、只需要用平锉和圆锉即可完成锉削 D、虚线框1加工,应先锯割再锉削,后钻孔 -
2、如图所示为某多功能减速机构的结构图,在电机的驱动下,实现不同大小、不同方向之间的速度控制输出,下列说法不正确的是( )
 A、驱动电机必须装在转轴1 B、转轴2转速大于转轴3,方向相反 C、转轴2的转速比转轴4大 D、齿轮1由旁边的蜗轮代替,直接驱动齿轮2,也可实现转轴2与转轴3的速度转换
A、驱动电机必须装在转轴1 B、转轴2转速大于转轴3,方向相反 C、转轴2的转速比转轴4大 D、齿轮1由旁边的蜗轮代替,直接驱动齿轮2,也可实现转轴2与转轴3的速度转换 -
3、如图所示是某形体的左视图和俯视图,相对应的主视图是( )
 A、
A、 B、
B、 C、
C、 D、
D、
-
4、最初的金工锯割阶段被称为起锯,分为近距离起锯与远距离起锯,需要大拇指顶住锯条以定位。以下在锯割中为锯下L长的钢条,起锯方式正确的是( )
 A、
A、 B、
B、 C、
C、 D、
D、
-
5、如图所示是一款多功能榨汁机,具有:轻松出汁、汁渣自动分离、自动清洗、离心风干、无线充电、收纳方便。下列关于该榨汁机的说法中,不恰当的是( )
 A、一键压榨,轻松出汁,符合设计的实用原则 B、造型新型独特,侧重于艺术设计 C、采用304不锈钢食品级安全材料制作,主要从“人”的角度考虑 D、内置锂电池,停电也可用,实现了人机关系的高效目标
A、一键压榨,轻松出汁,符合设计的实用原则 B、造型新型独特,侧重于艺术设计 C、采用304不锈钢食品级安全材料制作,主要从“人”的角度考虑 D、内置锂电池,停电也可用,实现了人机关系的高效目标 -
6、考虑到人机工程学的合理性,在涉及到操作台的设计高度时,总会考虑到人的静态尺寸与动态尺寸。以下四种操作均需在坐姿状态,针对操作台高度不同的设计,下列说法不合理的是( )
 A、钢琴琴键台的高度设定主要考虑舒适 B、电熨桌高度设定主要考虑熨烫时的安全 C、缝纫机面板高度设定主要考虑精准高效操作 D、电脑操控台面板高度在考虑舒适的同时,还考虑健康要求
A、钢琴琴键台的高度设定主要考虑舒适 B、电熨桌高度设定主要考虑熨烫时的安全 C、缝纫机面板高度设定主要考虑精准高效操作 D、电脑操控台面板高度在考虑舒适的同时,还考虑健康要求 -
7、无人驾驶汽车集自动控制、环境交互、视觉识别及人工智能于一体,是计算机科学、模式识别和智能控制技术高度发展的产物。某企业的“萝卜快跑”无人驾驶出租车投放市场后被广泛的关注与肯定,但在武汉与行人发生轻微碰撞又让人担忧其安全性,同时引发了交通认定方式的改变。下列关于该产品技术的分析中,不恰当的是( )
 A、无人驾驶改变交通事故中的责任认定方式,体现了技术的创新性 B、通过不断收集驾驶数据及改进算法,最终实现系统更新迭代,体现技术的实践性 C、集计算机科学、模式识别和智能控制技术于一体,体现技术的综合性 D、无人驾驶出租车在激光雷达、高精度地图及智能避障技术的保障下仍出现安全事故,更说明技术本身的复杂性
A、无人驾驶改变交通事故中的责任认定方式,体现了技术的创新性 B、通过不断收集驾驶数据及改进算法,最终实现系统更新迭代,体现技术的实践性 C、集计算机科学、模式识别和智能控制技术于一体,体现技术的综合性 D、无人驾驶出租车在激光雷达、高精度地图及智能避障技术的保障下仍出现安全事故,更说明技术本身的复杂性 -
8、小明设计了如图a所示的温控试验电路。原理是:当温度低于设定的下限值时,加热装置加热;当温度高于设定的上限值时,加热装置停止加热。其中Rt是热敏电阻,图b为555电路的内部结构图。请根据电路图及其描述完成以下任务:
 (1)、电路中的Rt应采用______A、正温度系数热敏电阻; B、负温度系数热敏电阻; C、正负温度系数热敏电阻均可;(2)、下列关于该电路的分析中正确的是(多选)______;A、适当增加Rpl阻值,会调低温度的上限和下限 B、当3脚输出高电平时,加热装置不加热,可能是R1阻值过大 C、若仅想调低上限温度,应该先调小Rp1再调大Rp3 D、Rp1与Rt位置互换、J-1与J-2位置互换,电路功能保持不变(3)、调试中发现继电器J-2触点损坏,小明准备用5脚和3脚重新设计电路。请你用1个二极管和1个可调电阻器在图c虚线框1内补全电路,要求保持电路原有的功能。
(1)、电路中的Rt应采用______A、正温度系数热敏电阻; B、负温度系数热敏电阻; C、正负温度系数热敏电阻均可;(2)、下列关于该电路的分析中正确的是(多选)______;A、适当增加Rpl阻值,会调低温度的上限和下限 B、当3脚输出高电平时,加热装置不加热,可能是R1阻值过大 C、若仅想调低上限温度,应该先调小Rp1再调大Rp3 D、Rp1与Rt位置互换、J-1与J-2位置互换,电路功能保持不变(3)、调试中发现继电器J-2触点损坏,小明准备用5脚和3脚重新设计电路。请你用1个二极管和1个可调电阻器在图c虚线框1内补全电路,要求保持电路原有的功能。
图c
(4)、小明在设计电路时,想给电路增加一个加热时发光二极管闪烁提示的电路,信号从555电路的3脚引出。请在图d虚线框2中选择合适的端子连接给定的元器件,将电路补充完整。
图d
-
9、如图所示,是小明准备在开学典礼上展示一款可以招手的模型。图a为木箱,用于放置电机、支架等物品,图b为封面板示意图,木箱与封面板之间有缝隙,图c为“手臂”,小明想让人物的“手臂”运动起来,做出“招手”的姿势,请帮小明实现机械传动部分。设计要求如下:
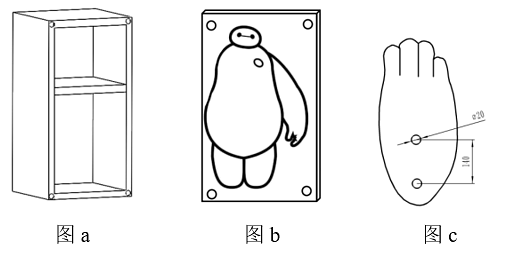
a.该装置能固定在木箱中,木箱尺寸为60cm×120cm;
b.人物的“手臂”上有直径约为Φ20mm的孔,两孔之间距离为140mm,“手臂”可以不停的摆动,摆动的幅度范围为60°;
c.结构具有一定强度,主材料选用5mm厚铝板;
d.由一个单方向运动的电机驱动,运行平稳。
请完成以下任务:
(1)、下列关于该模型的说法中,不恰当的是(单选)______;A、“手臂”转动速度不宜过快; B、“手臂”的摆动幅度考虑到设计的美观原则; C、模型制作完成后,可以用手适当拉拽“手臂”,检测传动结构是否牢固; D、模型制作完成后,可以用手捏住“手臂”,测试设备是否能够工作。(2)、在头脑中构思符合设计要求的多个方案,画出其中最优方案的设计草图(电机可用方框表示),简要说明方案的工作过程;(3)、在草图上标注主要尺寸。 -
10、小明马上要住校学习了,他发现家里没人给宠物投喂食物,于是准备设计一款自动投喂机,当检测机检测到投喂碗里没有食物,并且热辐射传感器检测到宠物猫靠近时,就会投放食物。如图所示为自动投喂机的概念图,请完成以下任务:
 (1)、小明发现问题的途径是(单选)______A、观察日常生活; B、收集和分析信息; C、技术研究与技术试验);(2)、为了设计制作自动投喂机,小明进行了以下分析,其中不恰当的是(多选)______;A、该自动投喂机能够有效地避免宠物摄入过量食物 B、应具有一定的抗干扰功能 C、当检测到宠物靠近时或碗里食物短缺时,立即投放食物 D、储粮盒中间部分可设计成透明形状,可以清楚的看清食物余量,考虑了信息交互(3)、小明为了更好的完成设计,制作完模型后,接下来要做的是(单选)______;A、构思方案; B、技术试验; C、方案评价; D、编写产品说明书);(4)、以下是小明绘制的自动投喂机控制系统方框图,其中正确的是(单选)______。A、
(1)、小明发现问题的途径是(单选)______A、观察日常生活; B、收集和分析信息; C、技术研究与技术试验);(2)、为了设计制作自动投喂机,小明进行了以下分析,其中不恰当的是(多选)______;A、该自动投喂机能够有效地避免宠物摄入过量食物 B、应具有一定的抗干扰功能 C、当检测到宠物靠近时或碗里食物短缺时,立即投放食物 D、储粮盒中间部分可设计成透明形状,可以清楚的看清食物余量,考虑了信息交互(3)、小明为了更好的完成设计,制作完模型后,接下来要做的是(单选)______;A、构思方案; B、技术试验; C、方案评价; D、编写产品说明书);(4)、以下是小明绘制的自动投喂机控制系统方框图,其中正确的是(单选)______。A、 B、
B、 C、
C、 D、
D、
-
11、如图所示是土壤湿度过低报警电路。当湿度低于设定值时,发光二极管闪烁报警。比较器 , 输出高电平; , 输出低电平。下列说法合理的是( )
 A、调大 , 可以调高设定湿度 B、三极管可能工作在饱和状态 C、电容C击穿,发光二极管将不发光 D、改变或的阻值,可以改变振荡频率
A、调大 , 可以调高设定湿度 B、三极管可能工作在饱和状态 C、电容C击穿,发光二极管将不发光 D、改变或的阻值,可以改变振荡频率 -
12、如图所示的信号处理电路中,A、B为输入信号,F为输出信号。下列输出波形与输入波形关系中正确的是( )
 A、
A、 B、
B、 C、
C、 D、
D、
-
13、小明在通用技术实践课上焊接了如图所示的声控LED流水灯,下列元器件描述正确的是( )
 A、①是发光二极管,导通电压一般在0.7-2.3V之间 B、②是555集成电路,输出信号为数字信号 C、③是电解电容,短的引脚为负极 D、④是有源蜂鸣器,焊接时需要考虑正负极
A、①是发光二极管,导通电压一般在0.7-2.3V之间 B、②是555集成电路,输出信号为数字信号 C、③是电解电容,短的引脚为负极 D、④是有源蜂鸣器,焊接时需要考虑正负极 -
14、下列关于控制系统的说法中正确的是( )A、土壤湿度控制系统中,控制量是土壤的实际湿度 B、水池水位控制系统中,水位传感器可作为控制器 C、开环控制系统的输出量不对系统的控制产生任何影响 D、在控制系统中,干扰因素一定都是由环境造成的
-
15、如图所示是农机自动驾驶系统,利用高精度卫星导航和角度传感器传输车轮摆动和方向信息,由控制器对农机的液压阀进行控制,农机按照设定的路线进行自动驾驶。相关的图形信息显示在显示器上,实现智能化、高精密度的农机驾驶。下列关于该分选系统的设计与分析中不恰当的是( )
 A、该系统可分为检测、驱动和显示子系统,各个子系统协同工作实现分选功能 B、双天线设计是为了实现更好地接收卫星定位信息 C、系统设计时应首先进行总体设计,然后设计各个子系统,制作安装后再整机调试 D、显示器的性能是影响农机自动驾驶系统优化的约束条件
A、该系统可分为检测、驱动和显示子系统,各个子系统协同工作实现分选功能 B、双天线设计是为了实现更好地接收卫星定位信息 C、系统设计时应首先进行总体设计,然后设计各个子系统,制作安装后再整机调试 D、显示器的性能是影响农机自动驾驶系统优化的约束条件 -
16、如图所示是某形体的主视图和俯视图,相对应的左视图是( )
 A、
A、 B、
B、 C、
C、 D、
D、
-
17、如图所示是一张滑轮凳的安装说明书,包括配件图和安装流程图,以下关于该安装说明书的分析正确的是( )
 A、安装的流程时序只能是:①→②→③→④ B、该说明书采用的流程表达方式是文字表达 C、托盘上的四个螺丝安装孔一定是螺纹孔 D、环节②还可以细分成若干小环节
A、安装的流程时序只能是:①→②→③→④ B、该说明书采用的流程表达方式是文字表达 C、托盘上的四个螺丝安装孔一定是螺纹孔 D、环节②还可以细分成若干小环节 -
18、下列通用技术实践操作过程中,不合理的是( )A、钢丝锯主要用于锯圆形或弧形半径较小的薄木板或胶合板 B、金属之间的不可拆卸连接一般采用铆接、焊接和螺栓螺母连接 C、对于木质板材的切割,除了使用传统的木工锯外,还可以使用激光切割机等设备对木板进行精确、快速的切割 D、套丝起套时,可用一只手的掌心按住扳手中部沿工件轴线下压,另一只手配合顺向旋进
-
19、如图所示为一款垃圾捡拾器,由手柄、扳机、绳索、固定钳口和活动钳口组成。要实现按压扳机两钳口咬合夹持垃圾的功能,图示位置处于夹持状态,下列设计方案中最合理的是( )A、
 B、
B、 C、
C、 D、
D、
-
20、如图所示是便携式照片打印机,体积小巧、时尚便携,满足了移动商务办公用户对打印机便携和性能的双重要求。下列关于该打印机的说法中,不恰当的是( )
 A、该打印机的研发过程,属于技术活动 B、出门旅行携带非常方便,主要考虑了人的因素 C、可享受免费保修等三包服务政策,体现了技术的专利性 D、配备了AC100-240V的电源,任一地区都能够使用,符合设计的创新原则
A、该打印机的研发过程,属于技术活动 B、出门旅行携带非常方便,主要考虑了人的因素 C、可享受免费保修等三包服务政策,体现了技术的专利性 D、配备了AC100-240V的电源,任一地区都能够使用,符合设计的创新原则