相关试卷
- 浙江省温州市十五校联合体2017-2018学年高二上学期期中联考通用技术试卷
- 浙江省桐乡市2016-2017学年高一下学期通用技术期中考试试卷
- 浙江省杭州市萧山区2016届通用技术高考模拟试卷(三)
- 浙江省慈溪市云龙中学2013-2014学年高一下学期通用技术期中联考试卷
- 浙江省2018届高三上学期通用技术选考试题
- 浙江省“七彩阳光”新高考研究联盟2017届高三下学期通用技术期初联考试卷
- 浙江省温州市2016年3月普通高中学业水平通用技术模拟考试试卷
- 浙江省2014年普通高中学业水平考试通用技术试卷
- 浙江省2015年9月普通高等学校招生统一考试通用技术试卷
- 浙江省2015年学业水平考试通用技术模拟试卷(二)
-
1、如图a所示是由两个与非门组成的基本RS触发器电路,当输入端加载如图b所示的信号时,在0-10秒时间段内,VD点亮的总时长约为( )
 A、3秒 B、4秒 C、5秒 D、6秒
A、3秒 B、4秒 C、5秒 D、6秒 -
2、在通用技术实践课中,小明在面包板上插装了如图所示的电阻、二极管、电解电容、三极管、电位器、发光二极管、555芯片,其中插装不正确的个数有( )
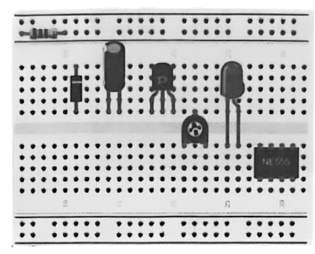 A、1个 B、2个 C、3个 D、4个
A、1个 B、2个 C、3个 D、4个 -
3、如图所示为工业上常采用的熔化极氩弧焊枪,其工作过程:当移动焊枪焊接时,检测装置自动采集焊枪移动的速度及距离,将信号传给控制装置控制送丝滚轮、供气及供电装置运作,使焊枪的喷嘴根据移动速度喷射出熔滴,达到均匀焊接的作用。请根据示意图和描述完成以下小题。
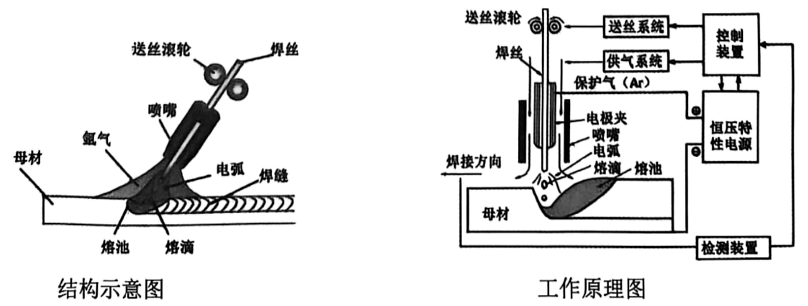 (1)、下列关于熔化极氩弧焊枪系统的分析中不恰当的是( )A、检测装置的目的是自动采集焊枪移动的速度及距离,体现了系统的目的性 B、由控制装置、送丝系统、供气系统、检测装置等部分组成,体现了系统的整体性 C、库存的喷嘴的性能是该系统优化的约束条件 D、设计焊枪时,应该先考虑总体要求,然后对送丝系统、供气系统、检测装置等部分进行设计,体现了系统分析的整体性原则(2)、关于熔化极氩弧焊枪系统,下列从控制系统角度进行的分析中不恰当的是( )A、喷射出熔滴是输出量 B、控制装置的输出信号不是控制量 C、焊接方向改变属于干扰因素 D、控制方式属于开环控制
(1)、下列关于熔化极氩弧焊枪系统的分析中不恰当的是( )A、检测装置的目的是自动采集焊枪移动的速度及距离,体现了系统的目的性 B、由控制装置、送丝系统、供气系统、检测装置等部分组成,体现了系统的整体性 C、库存的喷嘴的性能是该系统优化的约束条件 D、设计焊枪时,应该先考虑总体要求,然后对送丝系统、供气系统、检测装置等部分进行设计,体现了系统分析的整体性原则(2)、关于熔化极氩弧焊枪系统,下列从控制系统角度进行的分析中不恰当的是( )A、喷射出熔滴是输出量 B、控制装置的输出信号不是控制量 C、焊接方向改变属于干扰因素 D、控制方式属于开环控制 -
4、如图所示是小通设计的手机支架,他准备在通用技术实践教室用大小合适的钢板制作构件1,下列操作合理的是( )
 A、先划基准线,然后划轮廓线,最后划尺寸线 B、锯割加工时,需要留出一定的余量,且不能加润滑液 C、钻孔时应先装夹钻头,再安装工件 D、加工流程可以为:划线→锯割→钻孔→锉削→弯折
A、先划基准线,然后划轮廓线,最后划尺寸线 B、锯割加工时,需要留出一定的余量,且不能加润滑液 C、钻孔时应先装夹钻头,再安装工件 D、加工流程可以为:划线→锯割→钻孔→锉削→弯折 -
5、如图是一种新型液压千斤顶,液压杆竖直方向伸缩时,通过连杆从而升降顶片,起到升降重物的作用。液压杆伸长过程中,下列对该结构的分析不正确的是( )
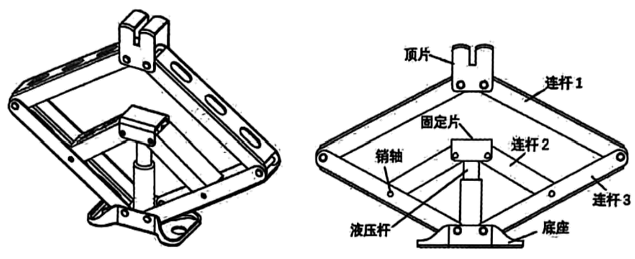 A、顶片向上移动 B、连杆1受拉 C、连杆2受拉 D、采用蝶形底座稳定性强
A、顶片向上移动 B、连杆1受拉 C、连杆2受拉 D、采用蝶形底座稳定性强 -
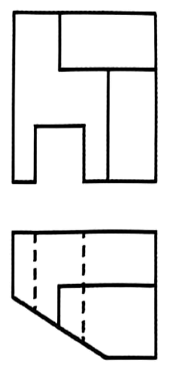
6、如图所示是某形体的主视图和俯视图,相对应的左视图是( )
 A、
A、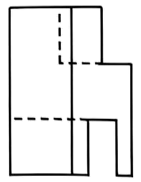 B、
B、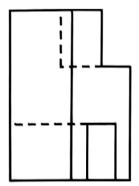 C、
C、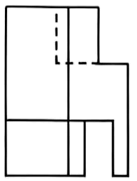 D、
D、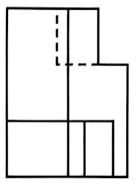
-
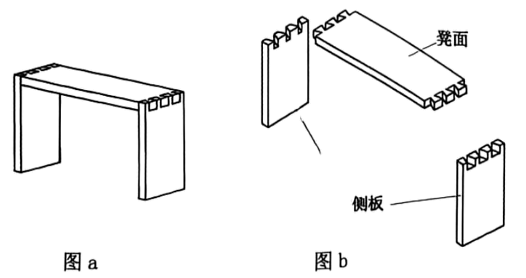
7、如图a所示是小通设计的木质小凳,小凳由图b所示的构件构成。现需要在两侧板之间增加一根横杆,以增加其稳固性。下列结构设计和材料规划合理的是( )
 A、
A、 B、
B、 C、
C、 D、
D、
-
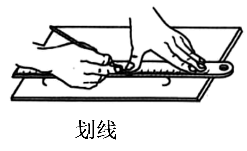
8、下列操作中不符合操作要领的是( )A、
 B、
B、 C、
C、 D、
D、
-
9、如图所示是某款智能AR眼镜,可以实现AI识物、拍照答题、多语种翻译、实时导航等多种功能,还支持声纹安全支付。请根据描述完成以下小题。
 (1)、下列关于该智能AR眼镜的说法中,不正确的是( )A、提供深度AIGC音频防伪技术、软硬件结合的联合防控体系等多项安全保障,保障用户在声纹支付过程中的资金安全,体现了技术保护人 B、AI技术使智能AR眼镜的设计得以实现 C、根据用户的体验和需求,不断试验改进,体现了技术的实践性 D、用户通过点头摇头等动作即可触发指令,体现了设计的实用原则(2)、下列关于该眼镜的分析与评价中不恰当的是( )A、该眼镜结构根据人体工学研发,在材质选择上以轻便的高品质材料为主,主要考虑了人的因素 B、该眼镜配有充电眼镜盒,20分钟即可充满电,实现了人机关系的高效目标 C、双击镜腿即可接听电话,满足了普通人群的需求 D、两镜脚间距设计,主要考虑了人的静态尺寸
(1)、下列关于该智能AR眼镜的说法中,不正确的是( )A、提供深度AIGC音频防伪技术、软硬件结合的联合防控体系等多项安全保障,保障用户在声纹支付过程中的资金安全,体现了技术保护人 B、AI技术使智能AR眼镜的设计得以实现 C、根据用户的体验和需求,不断试验改进,体现了技术的实践性 D、用户通过点头摇头等动作即可触发指令,体现了设计的实用原则(2)、下列关于该眼镜的分析与评价中不恰当的是( )A、该眼镜结构根据人体工学研发,在材质选择上以轻便的高品质材料为主,主要考虑了人的因素 B、该眼镜配有充电眼镜盒,20分钟即可充满电,实现了人机关系的高效目标 C、双击镜腿即可接听电话,满足了普通人群的需求 D、两镜脚间距设计,主要考虑了人的静态尺寸 -
10、小明受公园声控喷泉的启发,设计了如图所示的PK肺活量的趣味电路。用肺活量检测器检测肺活量,肺活量越大,肺活量检测器输出高电平的时间就越长,用LED灯显示PK结果。已知电路中三极管型号相同,比较器功能:V+>V-时输出+Vcc,V+<V-时输出-Vcc,V+=V-时输出0V。请完成以下任务:
 (1)、下面对该电路的分析不正确的是(多选)________A、为保证检测结果的正确性,电容应选大一些 B、电路中的电阻R1、R3、R4、R6必须大小一样 C、PK结果为没有LED灯亮,说明电路存在故障 D、PK结束后,测试结果可保持一段时间(2)、小明找弟弟来测试电路效果,小明用肺活量检测器1,弟弟用肺活量检测器2,PK结果为LED1亮,说明谁的肺活量大________A、小明 B、弟弟(3)、请在图中虚线框1中选择合适的接线柱连线,帮助小明用干电池完成电路电源的设计;
(1)、下面对该电路的分析不正确的是(多选)________A、为保证检测结果的正确性,电容应选大一些 B、电路中的电阻R1、R3、R4、R6必须大小一样 C、PK结果为没有LED灯亮,说明电路存在故障 D、PK结束后,测试结果可保持一段时间(2)、小明找弟弟来测试电路效果,小明用肺活量检测器1,弟弟用肺活量检测器2,PK结果为LED1亮,说明谁的肺活量大________A、小明 B、弟弟(3)、请在图中虚线框1中选择合适的接线柱连线,帮助小明用干电池完成电路电源的设计; (4)、小明想用555芯片设计一个测个人肺活量的电路,实现肺活量越大,亮的LED灯越多,请在图中虚线框2中选择合适的接线柱连线,帮助小明完成电路设计。
(4)、小明想用555芯片设计一个测个人肺活量的电路,实现肺活量越大,亮的LED灯越多,请在图中虚线框2中选择合适的接线柱连线,帮助小明完成电路设计。
-
11、小明发现妈妈在家用手持搅拌棒打发奶油时(如图a所示),非常费力,于是他打算把家里的手持搅拌棒设计改进为座式自动搅拌装置。他已完成了搅拌装置的支架设计(如图c所示),请帮小明完成剩余机械结构的设计。已知手持搅拌棒握把直径为Φ30(如图b所示)。设计要求如下:

(a)装置与支架2个Φ6孔连接
(b)装置能同时带动搅拌棒进行自转和绕轨迹公转
(c)不可对搅拌棒进行加工
(d)材料自选,装置采用电机驱动,数量不限(画出机械传动部分,电机可用方块表示)
请完成以下任务:
(1)、小明进行了以下设计分析,其中不恰当的是________A、装置应选用轻质高强度的材料 B、搅拌棒的转速越快越好 C、从人机关系考虑,装置边缘应倒角处理 D、装置尽量采用标准件(2)、请在头脑中构思符合设计要求的多个方案,并画出其中最优方案的设计草图,简要说明方案的工作过程(3)、在草图上标注主要尺寸。 -
12、小明在通用技术试验室制作了如图所示的木质台灯。在试验过程中,发现灯罩较重,调节构件间角度时,台灯容易翻倒等问题。小明收集了相关的技术资料准备对该台灯进行改进。请完成以下任务:
 (1)、小明发现问题的途径是________A、观察日常生活 B、收集和分析信息 C、技术研究与技术试验(2)、小明在设计改进过程中,以下考虑的因素和措施合理的是(多选)________A、去掉灯罩 B、加工工具、设备是否完备 C、换一个厚的铁制底板 D、采用模拟试验法进行稳定性试验(3)、小明在设计改进过程中,发现立板与底板的拆卸不方便,并且对连接结构有破坏。他想改变上述弊端,以下连接方式最可行的是________A、
(1)、小明发现问题的途径是________A、观察日常生活 B、收集和分析信息 C、技术研究与技术试验(2)、小明在设计改进过程中,以下考虑的因素和措施合理的是(多选)________A、去掉灯罩 B、加工工具、设备是否完备 C、换一个厚的铁制底板 D、采用模拟试验法进行稳定性试验(3)、小明在设计改进过程中,发现立板与底板的拆卸不方便,并且对连接结构有破坏。他想改变上述弊端,以下连接方式最可行的是________A、 B、
B、 C、
C、 D、
D、 (4)、小明在设计改进过程中,发现台灯按钮开关控制不方便,他想实现语音控制台灯开关。控制过程如下:语音传感模块接收到“开”的声音后发出信号,控制电路处理该信号后发指令给继电器,继电器吸合,灯亮;当语音传感模块接收到“关”的声音发出信号,则控制灯不亮。请根据描述填写台灯控制系统方框图(填写文字,全对得分)
(4)、小明在设计改进过程中,发现台灯按钮开关控制不方便,他想实现语音控制台灯开关。控制过程如下:语音传感模块接收到“开”的声音后发出信号,控制电路处理该信号后发指令给继电器,继电器吸合,灯亮;当语音传感模块接收到“关”的声音发出信号,则控制灯不亮。请根据描述填写台灯控制系统方框图(填写文字,全对得分)
、、
-
13、如图所示是小明设计的房间湿度控制电路,若房间湿度低于下限值时,系统启动湿度喷雾器M给房间增加湿度,湿度高于上限时停止加湿。已知三极管VT1始终工作在放大状态,下列关于该电路分析正确的是( )
 A、R4滑片下移,下限湿度变小,上限湿度不变 B、喷雾器始终不工作,可能是电阻R7虚焊 C、适当调大R3,湿度的上下限均变大 D、用常开触点J-2替代VD1,电路能维持原有功能
A、R4滑片下移,下限湿度变小,上限湿度不变 B、喷雾器始终不工作,可能是电阻R7虚焊 C、适当调大R3,湿度的上下限均变大 D、用常开触点J-2替代VD1,电路能维持原有功能 -
14、如图所示的信号处理电路,A、B为输入信号,F为输出信号。下列波形关系中不可能出现的是( )
 A、
A、 B、
B、 C、
C、 D、
D、
-
15、小明设计了如图b所示的高温报警电路,并在实践课上用面包板搭建了该电路(如图a所示),已知图a中三极管类型为PNP。请分析图a搭建的电路中错误共有几处( )
 A、1处 B、2处 C、3处 D、4处
A、1处 B、2处 C、3处 D、4处 -
16、往复式洗车控制系统主要由循环水水位控制子系统、位置提示子系统、喷水子系统、定时风干控制子系统等部分组成。工作过程如下:循环水水位控制子系统保持供水水位在一定范围内,低于一定水位时加水;位置传感器检测车辆位置,并通过扬声器声音提示位置是否正确;激光传感器检测车身大小与类型,总控制装置生成洗车流程与时间;驾驶员扫码确认,总控制装置收到“确认”信号后,控制喷淋装置、轮刷等开始洗车,洗车结束后定时风干车辆。请根据描述完成以下小题。
 (1)、下列关于往复式洗车控制系统的分析中正确的是( )A、风干装置的性能是系统优化的约束条件 B、循环水水位控制子系统故障会影响喷淋子系统的工作,体现了系统的相关性 C、可以清洗不同大小的车型,体现了系统的动态性 D、总控制装置根据检测信号生成洗车流程和时间,体现了系统分析的科学性原则(2)、下列关于往复式洗车控制系统的分析中不正确的是( )A、循环水水位控制子系统是闭环控制 B、洗车耗水量是循环水水位控制的干扰因素 C、生成的洗车流程与时间是往复式洗车控制系统的控制量 D、位置提示控制子系统中被控对象是扬声器
(1)、下列关于往复式洗车控制系统的分析中正确的是( )A、风干装置的性能是系统优化的约束条件 B、循环水水位控制子系统故障会影响喷淋子系统的工作,体现了系统的相关性 C、可以清洗不同大小的车型,体现了系统的动态性 D、总控制装置根据检测信号生成洗车流程和时间,体现了系统分析的科学性原则(2)、下列关于往复式洗车控制系统的分析中不正确的是( )A、循环水水位控制子系统是闭环控制 B、洗车耗水量是循环水水位控制的干扰因素 C、生成的洗车流程与时间是往复式洗车控制系统的控制量 D、位置提示控制子系统中被控对象是扬声器 -
17、如图所示为某公司新产品开发工艺流程图。关于该流程,下列分析不恰当的是( )
 A、送样与模具工艺整改是并行工序 B、模具设计与生产模具制造是串行工序 C、设计评价、检测性能试验环节保证了新产品的生产质量 D、流程的设计需要考虑材料、工艺、人员、资金、环境和设备
A、送样与模具工艺整改是并行工序 B、模具设计与生产模具制造是串行工序 C、设计评价、检测性能试验环节保证了新产品的生产质量 D、流程的设计需要考虑材料、工艺、人员、资金、环境和设备 -
18、如图所示的夹持结构,在液压杆作用下带动连杆、夹持臂实现夹紧工件。下面关于该夹持结构的分析不正确的是( )
 A、夹紧过程中,夹持臂受弯曲 B、液压杆上拉,此时夹紧工件 C、夹紧工件时,连杆1受拉、连杆4受压 D、液压杆与连杆3之间连接方式是刚连接
A、夹紧过程中,夹持臂受弯曲 B、液压杆上拉,此时夹紧工件 C、夹紧工件时,连杆1受拉、连杆4受压 D、液压杆与连杆3之间连接方式是刚连接 -
19、小明为了探讨三视图与立体模型之间的空间对应关系,进行了如下的绘制与加工。请帮助小明完成以下小题。(1)、下列形体中,与所示的三视图对应的是( )
 A、
A、 B、
B、 C、
C、 D、
D、 (2)、小明打算采用大小合适的木料和钢块分别加工制作上题模型,下列描述正确的是( )A、制作木质模型需要用到角尺、木工铅笔、凿子、钢丝锯、木工锉刀、木工刨子、墨斗 B、在使用凿子加工木质模型时,一手应紧握凿柄,不要让凿子左右摆动,以防伤手 C、制作金属模型需要用到角尺、划规、钢锯、麻花钻头、丝锥、半圆锉刀 D、加工金属模型时,钻排孔需要带手套、护目镜、安全帽
(2)、小明打算采用大小合适的木料和钢块分别加工制作上题模型,下列描述正确的是( )A、制作木质模型需要用到角尺、木工铅笔、凿子、钢丝锯、木工锉刀、木工刨子、墨斗 B、在使用凿子加工木质模型时,一手应紧握凿柄,不要让凿子左右摆动,以防伤手 C、制作金属模型需要用到角尺、划规、钢锯、麻花钻头、丝锥、半圆锉刀 D、加工金属模型时,钻排孔需要带手套、护目镜、安全帽 -
20、如图所示为不对称工件的夹持机构,液压伸缩杆上拉带动两个夹臂在支撑板的导轨上移动,实现工件的夹持,夹持时工件不发生水平移动。现缺少固定在连接板a上的连接板b,它与固定在夹臂上的滚轮柱相连,带动夹臂沿导轨移动。下列连接板b结构方案合理的是( )
 A、
A、 B、
B、 C、
C、 D、
D、