相关试卷
- 浙江省温州市十五校联合体2017-2018学年高二上学期期中联考通用技术试卷
- 浙江省桐乡市2016-2017学年高一下学期通用技术期中考试试卷
- 浙江省杭州市萧山区2016届通用技术高考模拟试卷(三)
- 浙江省慈溪市云龙中学2013-2014学年高一下学期通用技术期中联考试卷
- 浙江省2018届高三上学期通用技术选考试题
- 浙江省“七彩阳光”新高考研究联盟2017届高三下学期通用技术期初联考试卷
- 浙江省温州市2016年3月普通高中学业水平通用技术模拟考试试卷
- 浙江省2014年普通高中学业水平考试通用技术试卷
- 浙江省2015年9月普通高等学校招生统一考试通用技术试卷
- 浙江省2015年学业水平考试通用技术模拟试卷(二)
-
1、如图为了实现电机顺时针转动推动推杆做往复运动,小明设计了以下四种方案,安装时连接点A、B利用松铆相连,其中不能实现该功能的是( )
 A、
A、 B、
B、 C、
C、 D、
D、
-
2、如图所示的现代化果蔬种植大棚,包含温度、湿度、光照控制等子系统。湿度控制系统的工作过程:当传感器检测到大棚内湿度未达到设定值时,环境控制仪发出控制信号,控制喷水加湿装置工作,使大棚内湿度达到设定值。请根据图和描述完成小题。
 (1)、下列关于现代化果蔬种植大棚系统设计与分析中恰当的是( )A、温度控制、湿度控制、光照控制等子系统各自独立、互不影响 B、需要定期对系统进行检查和维护,以保证系统正常运行,体现了系统的目的性 C、设计该系统时,既要考虑温度控制,又要考虑湿度控制,体现了系统分析的综合性原则 D、湿度传感器损坏了,会影响整个系统正常工作,体现了系统的相关性(2)、下列关于果蔬大棚的湿度控制系统的分析中正确的是( )A、湿度传感器参与了该控制系统的反馈过程 B、果蔬大棚是该控制系统的被控量 C、喷水加湿装置是该控制系统的控制器 D、大棚内的湿度属于该控制系统的干扰因素
(1)、下列关于现代化果蔬种植大棚系统设计与分析中恰当的是( )A、温度控制、湿度控制、光照控制等子系统各自独立、互不影响 B、需要定期对系统进行检查和维护,以保证系统正常运行,体现了系统的目的性 C、设计该系统时,既要考虑温度控制,又要考虑湿度控制,体现了系统分析的综合性原则 D、湿度传感器损坏了,会影响整个系统正常工作,体现了系统的相关性(2)、下列关于果蔬大棚的湿度控制系统的分析中正确的是( )A、湿度传感器参与了该控制系统的反馈过程 B、果蔬大棚是该控制系统的被控量 C、喷水加湿装置是该控制系统的控制器 D、大棚内的湿度属于该控制系统的干扰因素 -
3、如图所示是某形体的主视图和左视图,相对应的俯视图是( )
 A、
A、 B、
B、 C、
D、
C、
D、
-
4、如图所示是连杆冲压结构的示意图,电机顺时针方向转动,使冲压杆在滑轨中做冲压运动,下列对工作时各个构件主要受力形式的分析中错误的是( )

图a

图b
A、电机轴与连杆1的连接为刚连接 B、连杆1在冲压的过程中始终受弯曲 C、销轴由图a到图b的过程中受扭转 D、连杆2由图a到图b的过程中受拉 -
5、某塑料椅生产厂家为甄选合格的产品, 出厂前必须对其进行使用寿命及各种试验。如稳定性试验、抗老化性能试验、最大负载试验等,以上描述中没有涉及的试验方法是( )A、优选试验法 B、模拟试验法 C、强化试验法 D、虚拟试验法
-
6、如图为小明设计的某连接件的图样,需要用钢板将它制作成实物,已知通用实践室中台钻的最大钻孔直径为12mm,请根据题图完成小题
 (1)、图中尺寸标注错误的有( )A、2处 B、3处 C、4处 D、5处(2)、用大小合适的钢板制作该零件,不需要用到的工具有( )A、
(1)、图中尺寸标注错误的有( )A、2处 B、3处 C、4处 D、5处(2)、用大小合适的钢板制作该零件,不需要用到的工具有( )A、 手锯
B、
手锯
B、 台虎钳
C、
台虎钳
C、 平口钳
D、
平口钳
D、 钢丝锯
(3)、小明在通用技术实践课中加工该零件,以下说法错误的是( )A、划线时使用到的工具有划针、划规、样冲、钢直尺等 B、加工流程可以是
钢丝锯
(3)、小明在通用技术实践课中加工该零件,以下说法错误的是( )A、划线时使用到的工具有划针、划规、样冲、钢直尺等 B、加工流程可以是 C、可以采用表面刷光或者喷涂油漆的方式防止生锈
D、中间的圆孔在加工时需要先钻孔后再用圆锉进行锉削
C、可以采用表面刷光或者喷涂油漆的方式防止生锈
D、中间的圆孔在加工时需要先钻孔后再用圆锉进行锉削
-
7、如图是某厂家生产的一款保险箱的评价坐标图,下列对该保险箱的评价中,正确的是( )
 A、远程报警提醒,智能防盗,体现了人机关系的安全目标 B、该保险箱价格较低,操作性好,性价比高 C、设计时选用高强度的材料主要是从“物”角度考虑的 D、可通过密码、指纹、蓝牙等方式解锁,体现了信息交互
A、远程报警提醒,智能防盗,体现了人机关系的安全目标 B、该保险箱价格较低,操作性好,性价比高 C、设计时选用高强度的材料主要是从“物”角度考虑的 D、可通过密码、指纹、蓝牙等方式解锁,体现了信息交互 -
8、如图所示是某品牌的智能体脂称,下列对该体脂称的评价中,错误的是( )
 A、高亮LED液晶显示屏,晚上也能清楚看见数字,体现了设计的实用原则 B、市斤/公斤显示一键转换,实现了人机关系高效的目标,满足特殊人群的需要 C、智能省电芯片,上称自动开机,下称待机,体现了设计的可持续发展原则 D、全包底包边,防尘抗潮,考虑了设计分析中“环境”的因素
A、高亮LED液晶显示屏,晚上也能清楚看见数字,体现了设计的实用原则 B、市斤/公斤显示一键转换,实现了人机关系高效的目标,满足特殊人群的需要 C、智能省电芯片,上称自动开机,下称待机,体现了设计的可持续发展原则 D、全包底包边,防尘抗潮,考虑了设计分析中“环境”的因素 -
9、如图所示为一款扫拖一体机, 从技术的角度,以下说法错误的是( )
 A、内置三角形拖布交错旋转,有效清除死角灰尘,体现了技术的目的性 B、经研发团队不断的测试改良才最终问世,体现了技术的实践性 C、该产品能自动清洗、充电、APP远程遥控等,体现了技术的综合性 D、在研发过程中就获批了相关专利,体现了技术的专利性
A、内置三角形拖布交错旋转,有效清除死角灰尘,体现了技术的目的性 B、经研发团队不断的测试改良才最终问世,体现了技术的实践性 C、该产品能自动清洗、充电、APP远程遥控等,体现了技术的综合性 D、在研发过程中就获批了相关专利,体现了技术的专利性 -
10、小明参观了某单位的水泵配电房后,对水泵配电房的管理有自己的想法,设计了如下控制试验电路。当配电房的湿度高于75%时VD2发光,表示风机运行除湿,当配电房的湿度低于35%时VD1发光,表示风机停止除湿,RS1、RS2为同型号的负特性湿敏电阻;同时安装了开窗报警装置,窗户闭合时,干簧管K闭合,窗户打开时,干簧管K断开,只要窗户打开就会持续报警,提醒管理人员。请完成以下任务:
 (1)、电路中的蜂鸣器 HA 应采用( )A、无源蜂鸣器 B、有源蜂鸣器(2)、请在图1虚线框中完成开窗报警电路部分的元器件连接,将电路补充完整;
(1)、电路中的蜂鸣器 HA 应采用( )A、无源蜂鸣器 B、有源蜂鸣器(2)、请在图1虚线框中完成开窗报警电路部分的元器件连接,将电路补充完整; (3)、关于图1的湿度检测电路部分,以下说法正确的是(多选)( );A、R1调节上限值、R2调节下限值; B、R1调节下限值、R2调节上限值; C、增大R1阻值,湿度调节范围增大; D、减小R1阻值,湿度调节范围增大(4)、小明在搭建该实验电路时,发现没有或非门芯片,准备用CT74LS00四2输入与非门集成芯片代替,请你帮助小明,在图2虚线框内完成电路的设计,要求保持电路原有的功能,不能超过两个与非门。
(3)、关于图1的湿度检测电路部分,以下说法正确的是(多选)( );A、R1调节上限值、R2调节下限值; B、R1调节下限值、R2调节上限值; C、增大R1阻值,湿度调节范围增大; D、减小R1阻值,湿度调节范围增大(4)、小明在搭建该实验电路时,发现没有或非门芯片,准备用CT74LS00四2输入与非门集成芯片代替,请你帮助小明,在图2虚线框内完成电路的设计,要求保持电路原有的功能,不能超过两个与非门。
-
11、小明所在学校使用的是多功能讲台,如下图所示,桌面的一部分装有翻转装置,安装上电脑显示屏即可灵活使用电脑。小明发现大家站着使用显示屏时,显示屏偏低且角度只能固定不能调节,使用不方便,考虑对这部分桌面进行改装,设计一个对显示屏的高度、角度有调节功能的装置,翻转部分的桌面长550mm,宽400mm,加上显示器总质量约7kg,装置设计要求如下:
(a)显示屏上下升降范围不大于150mm,角度调节范围不大于145°;
(b)调节过程运行稳定,并能保持在调节后的位置;
(c)装置具有足够的强度和稳定性;
(d)采用减速电机(数量不限);
(e)其余材料自选。

请完成以下任务:
(1)、在头脑中构思符合设计要求的多个方案,画出其中最优方案的设计草图(电机可用方框表示,必要时可用文字说明);(2)、在草图上标注主要尺寸;(3)、小明准备在装置安装后进行技术试验,并设计了试验方案。以下试验步骤中做法不合理的是(单选)( )。A、将托盘放置在装置上,并在托盘上逐次添加砝码,直至托盘与砝码总质量达到8kg,观察装置各部分连接是否牢固 B、装置上放置一定质量的托盘与砝码,测试升降装置在150mm范围内的运行情况,试验多次,直到荷载8kg,并做好记录 C、装置安装上显示屏,连续多次升降装置部分,观察装置上减速电机的发热情况 D、装置安装上显示屏,将装置上升到最高处,在145°范围内连续调节,测试装置的稳定性 -
12、小明学习了《稳固结构的探析》这一节内容后,知道构件的截面形状是结构强度的影响因素,他准备去制作一个不同截面形状间结构强度比较的试验装置。小明上网收集相关资料,经过多次分析比较,设计了如下的图样,选用实木和三合板进行制作,根据描述,完成下列几
个问题:
 (1)、小明在绘制该图样之前,要考虑的是(多选) ( );A、自己的动手能力 B、展示模型的制作 C、实验操作说明 D、设计截面的形状 E、图样中各构件尺寸大小 F、成本预算与材料选择(2)、小明动手制作该模型前,综合考虑支撑脚的样式,三个截面孔的形状与周长,以及上网学 习构件间的连接装配等事项,运用的方法是(单选) ( );A、设问法 B、形态分析法 C、仿生法 D、联想法(3)、加工三个形状的截面孔时, 以下可能用到的工具有(单选) ( );A、
(1)、小明在绘制该图样之前,要考虑的是(多选) ( );A、自己的动手能力 B、展示模型的制作 C、实验操作说明 D、设计截面的形状 E、图样中各构件尺寸大小 F、成本预算与材料选择(2)、小明动手制作该模型前,综合考虑支撑脚的样式,三个截面孔的形状与周长,以及上网学 习构件间的连接装配等事项,运用的方法是(单选) ( );A、设问法 B、形态分析法 C、仿生法 D、联想法(3)、加工三个形状的截面孔时, 以下可能用到的工具有(单选) ( );A、 B、
B、 C、
C、 D、
D、 (4)、各构件完成制作后,接下来组装连接环节,下列可用于连接的有(多选)( );A、
(4)、各构件完成制作后,接下来组装连接环节,下列可用于连接的有(多选)( );A、 B、
B、 C、
C、 D、
D、
-
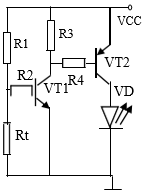
13、如图所示是小明参照课本中的案例分析搭建的发光二极管亮度跟随声音音量变化电路。为了电路能正常工作,小明对该电路进行分析和调试,下列说法中正确的是( )
 A、静音时,VT1、VT2均工作于放大状态 B、可以用指针式多用电表R×1K挡判断VD好坏 C、调换BM与R1位置,电路将不能正常工作 D、测得流过R3电流5.6mA,应调大R2阻值
A、静音时,VT1、VT2均工作于放大状态 B、可以用指针式多用电表R×1K挡判断VD好坏 C、调换BM与R1位置,电路将不能正常工作 D、测得流过R3电流5.6mA,应调大R2阻值 -
14、如图所示电路,电路中的电子元器件正常工作,Ui为输入信号,负载R2上的信号U0为输出信号,下列输出波形与输入波形关系中可能的是( )
 A、
A、 B、
B、 C、
C、 D、
D、
-
15、小明准备焊接如图所示的电路原理图,下列器材中不需要的是( )
 A、
A、 面包板
B、
面包板
B、 万能板
C、
万能板
C、 电烙铁
D、
电烙铁
D、 高温海绵
高温海绵
-
16、如图所示的码垛运输系统,包含成品转运子系统和机器人码垛子系统,成品转运子系统工作过程: 当相机拍摄区域检测到传送带上有成品时,传送带暂停,相机拍摄成品图像并传送到控制中心,控 制中心根据成品相对基准位置的偏差,控制码垛机器人抓取成品进行有序堆放。机器人码垛子系统 工作过程:重力传感器检测到的压力值传输给控制中心,当数值达到设定值时,控制中心控制叉车 机器人将叉车板上的成品运输至包装车间;叉车机器人运输完成后,传送带启动,系统继续进行码 垛。请根据示意图和描述完成小题。
 (1)、下列关于该码垛运输系统的说法中不恰当的是( )A、选择码垛机器人夹爪时,考虑了成品的刚度与质量 B、传送带工作一段时间后,需要重新进行校正,体现了系统的动态性 C、控制中心通过分析计算成品位置偏差实现抓取,体现了系统分析的科学性原则 D、成品的规格是码垛运输系统控制优化的约束条件(2)、下列关于机器人码垛子系统控制的分析中不合理的是( )A、成品堆是该子系统的被控对象 B、叉车机器人是该子系统的执行器 C、该机器人码垛子系统是闭环控制系统 D、成品间重量偏差不是该子系统的干扰因素
(1)、下列关于该码垛运输系统的说法中不恰当的是( )A、选择码垛机器人夹爪时,考虑了成品的刚度与质量 B、传送带工作一段时间后,需要重新进行校正,体现了系统的动态性 C、控制中心通过分析计算成品位置偏差实现抓取,体现了系统分析的科学性原则 D、成品的规格是码垛运输系统控制优化的约束条件(2)、下列关于机器人码垛子系统控制的分析中不合理的是( )A、成品堆是该子系统的被控对象 B、叉车机器人是该子系统的执行器 C、该机器人码垛子系统是闭环控制系统 D、成品间重量偏差不是该子系统的干扰因素 -
17、如图所示是某形体的主视图和左视图,下列相对应的俯视图是( )
 A、
A、 B、
B、 C、
C、 D、
D、
-
18、如图所示是老式缝纫机踏板传动机构示意图。踏板与连杆相连接,连杆连接曲轴,曲轴带动皮带轮转动,当踏板受到图示状态下的力F时,下列说法正确的是( )
 A、踏板受压,连杆受拉,曲轴受弯曲 B、踏板受弯曲,连杆受拉,曲轴受弯曲和受扭转 C、踏板受弯曲,连杆受压,曲轴受弯曲和受扭转 D、曲轴与皮带轮铰连接,踏板与连杆刚连接
A、踏板受压,连杆受拉,曲轴受弯曲 B、踏板受弯曲,连杆受拉,曲轴受弯曲和受扭转 C、踏板受弯曲,连杆受压,曲轴受弯曲和受扭转 D、曲轴与皮带轮铰连接,踏板与连杆刚连接 -
19、如图所示是小明设计的某零件图样, 零件的外圆面均相切,请根据题图完成小题。
 (1)、该零件图样的尺寸标注中,漏标的尺寸共有( )A、2 处 B、3 处 C、4 处 D、5 处(2)、用厚度4mm的钢板制作该零件,下列说法 中合理的是( )A、用方锉和半圆锉完成所有的锉削 B、正六边形孔的加工:划线→钻孔→锯割→锉削 C、可以戴手套进行锯割和锉削 D、锉削R6圆弧时,半圆锉不能上下摆动
(1)、该零件图样的尺寸标注中,漏标的尺寸共有( )A、2 处 B、3 处 C、4 处 D、5 处(2)、用厚度4mm的钢板制作该零件,下列说法 中合理的是( )A、用方锉和半圆锉完成所有的锉削 B、正六边形孔的加工:划线→钻孔→锯割→锉削 C、可以戴手套进行锯割和锉削 D、锉削R6圆弧时,半圆锉不能上下摆动 -
20、小明准备用实木制作如图所示的一个夹榫,从结构的稳固程度考虑,下列方案合理的是( )
 A、
A、 B、
B、 C、
C、 D、
D、