相关试卷
- 浙江省温州市十五校联合体2017-2018学年高二上学期期中联考通用技术试卷
- 浙江省桐乡市2016-2017学年高一下学期通用技术期中考试试卷
- 浙江省杭州市萧山区2016届通用技术高考模拟试卷(三)
- 浙江省慈溪市云龙中学2013-2014学年高一下学期通用技术期中联考试卷
- 浙江省2018届高三上学期通用技术选考试题
- 浙江省“七彩阳光”新高考研究联盟2017届高三下学期通用技术期初联考试卷
- 浙江省温州市2016年3月普通高中学业水平通用技术模拟考试试卷
- 浙江省2014年普通高中学业水平考试通用技术试卷
- 浙江省2015年9月普通高等学校招生统一考试通用技术试卷
- 浙江省2015年学业水平考试通用技术模拟试卷(二)
-
1、某设计师看到楼房玻璃外侧不方便清洁,于是发明了如图所示的双面玻璃擦窗器,该擦窗器可以根据玻璃的厚度设置不同挡位的磁力来保证擦拭效果以及保护玻璃在擦拭过程中不受磨损。下列关于双面玻璃擦窗器的说法中错误的是( )
 A、同时擦拭内外侧玻璃,相当于延长了人手的长度,提高了作业效率,体现了技术解放人的作用 B、设计时在研发和设计该产品过程中,激发了自己的创新精神和实践能力,体现了技术发展人的作用 C、设置不同挡位的磁力以保护玻璃在擦拭过程中不受磨损,体现了技术保护人的作用 D、这项发明设计是为了满足人们的某种需求
A、同时擦拭内外侧玻璃,相当于延长了人手的长度,提高了作业效率,体现了技术解放人的作用 B、设计时在研发和设计该产品过程中,激发了自己的创新精神和实践能力,体现了技术发展人的作用 C、设置不同挡位的磁力以保护玻璃在擦拭过程中不受磨损,体现了技术保护人的作用 D、这项发明设计是为了满足人们的某种需求 -
2、技术应用题
如图a所示是小明所在学校对砖墙的美化,用绳子将塑料瓶改装的花盆悬挂在墙上,不够稳定,存在安全隐患。花盆草图如图b所示,请你设计该花盆支架,设计要求如下:

①一个支架放置一个花盆,要具有足够的承重能力;
②花盆放置在支架上稳定可靠;
③支架能安装在墙壁上,连接牢固;
④使用2mm厚的钢板制作。
请完成以下任务:
(1)、设计该支架时不需要考虑的因素是 。A、花盆的尺寸 B、支架与墙壁的连接方式 C、支架的安装高度(2)、画出支架的设计草图,必要时可用文字说明;(3)、在设计草图上标注主要尺寸;(4)、下列连接件中,适合用于支架与墙壁连接的是 。A、紧定螺钉 B、膨胀螺钉 C、铆钉(5)、制作完成后,小明设计了下列技术试验,其中不合理的是 。A、在墙壁上反复拆装支架,检验是否容易拆装 B、支架安装在墙上并放置装满泥土的花盆,观察支架与墙壁的连接是否牢固 C、支架安装在墙上并放置装满泥土的花盆,观察支架的变形程度 -
3、如图所示是内燃机连杆的装置结构示意图,定位套安装在连杆体和连杆盖的螺栓孔中,用于连杆盖在连杆体上定位,上、下轴瓦安装在连杆体和连杆盖的半圆孔中,用于保护连杆不受磨损,螺栓穿过连杆体、定位套、连杆盖安装在螺栓孔中,放上垫片并用螺母拧紧,用开口销将螺栓和螺母固定在一起,防止螺母松动。将零件全部安装到连杆体上,需要以下环节:①安装定位套,②安装连杆盖,③安装上、下轴瓦,④安装螺栓,⑤安装垫片,⑥安装开口销,⑦安装螺母。请分析连杆的装配结构和工艺,回答以下问题:
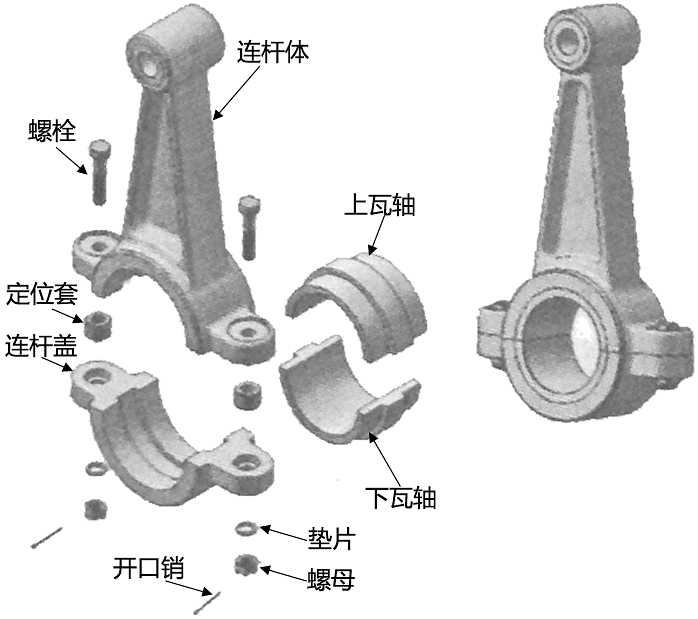 (1)、合理的装配流程为:①→→→→⑤→ → 。(2)、连接连杆体和连杆盖的螺栓和螺母要求具有较高的强度宜选用的材料是: (在①不锈钢,②铜,③塑料中选一种,将序号填写在“ ”处)
(1)、合理的装配流程为:①→→→→⑤→ → 。(2)、连接连杆体和连杆盖的螺栓和螺母要求具有较高的强度宜选用的材料是: (在①不锈钢,②铜,③塑料中选一种,将序号填写在“ ”处) -
4、如图所示是某汽车在鹅卵石路面上进行性能试验,这种事试验方式属于( )
 A、优选试验 B、虚拟试验 C、强化试验 D、移植试验
A、优选试验 B、虚拟试验 C、强化试验 D、移植试验 -
5、如图所示是反渗透技术在海水淡化处理中的应用示意图。海水杀菌、过滤后,经高压泵送到反渗透膜装置去除盐分成分淡水。能量回收装置回收高压泵输出的能量,提高能源利用率。为了保持淡化能量,反渗透膜表面需要定期清理污垢。下列关于该技术的说法中不正确的是( )
 A、能淡化海水,体现了技术的目的性 B、反渗透技术运用多学科知识,体现了技术的综合性 C、可回收能量,节约能源,符合可持续发展的理念 D、需定期清理反渗透膜表面的污垢,体现了技术的两面性
A、能淡化海水,体现了技术的目的性 B、反渗透技术运用多学科知识,体现了技术的综合性 C、可回收能量,节约能源,符合可持续发展的理念 D、需定期清理反渗透膜表面的污垢,体现了技术的两面性 -
6、小明在家洗碗时发现如图所示的百洁布没有合适的地方放,因此打算设计并制作一个沥水架。请完成以下任务:
 (1)、小明发现问题的途径是 ;A、观察日常生活 B、收集和分析信息 C、技术研究与技术试验(2)、以下不属于设计限制因素的是 ;A、小明的加工能力 B、百洁布的大小 C、百洁布的颜色 D、水龙头的出水量(3)、小明的部分设计要求如下,其中与人机关系有关的是 ;A、可放置百洁布 B、边角光滑,无毛刺棱角 C、可安装在水龙头上 D、拿取百洁布方便 E、具有良好的防水防潮性能;(4)、以下是小明在设计过程中经历的部分环节,根据设计的一般过程,这些环节合理的先后顺序是 。
(1)、小明发现问题的途径是 ;A、观察日常生活 B、收集和分析信息 C、技术研究与技术试验(2)、以下不属于设计限制因素的是 ;A、小明的加工能力 B、百洁布的大小 C、百洁布的颜色 D、水龙头的出水量(3)、小明的部分设计要求如下,其中与人机关系有关的是 ;A、可放置百洁布 B、边角光滑,无毛刺棱角 C、可安装在水龙头上 D、拿取百洁布方便 E、具有良好的防水防潮性能;(4)、以下是小明在设计过程中经历的部分环节,根据设计的一般过程,这些环节合理的先后顺序是 。①测量抹布的尺寸,明确设计要求
②把多个方案用草图的方式画出来
③请同学们帮忙挑选满意的设计方案
④与同学交流设计制作过程中的体会感想
⑤确定材料,选择合适的加工方法,挑选合适的连接件
A、①⑤②③④ B、①②③⑤④ C、①③⑤②④ D、①②⑤④③ -
7、从技术的价值角度分析下列案例,完成任务:
 (1)、防护服能阻隔新冠病毒的传播,体现了技术具有 的作用;A、保护人 B、解放人 C、发展人(2)、各种交通工具的使用,拓展了人们的活动空间,体现了技术具有 的作用;A、保护人 B、解放人 C、发展人(3)、AI技术的应用,改变了人类传统的思维方式,体现了技术具有 的作用。A、保护人 B、解放人 C、发展人
(1)、防护服能阻隔新冠病毒的传播,体现了技术具有 的作用;A、保护人 B、解放人 C、发展人(2)、各种交通工具的使用,拓展了人们的活动空间,体现了技术具有 的作用;A、保护人 B、解放人 C、发展人(3)、AI技术的应用,改变了人类传统的思维方式,体现了技术具有 的作用。A、保护人 B、解放人 C、发展人 -
8、如图所示为一款食堂4人连体餐桌椅,图中已有的尺寸中,主要考虑人的静态尺寸的是( )
 A、75cm B、120cm C、60cm D、140cm
A、75cm B、120cm C、60cm D、140cm -
9、如图为分离式双层沥水篮,当上层篮子提起时,沥出的水可以储存在下层篮子里,用于反复浸洗,下列说法中不正确的是( )
 A、该设计能够简化洗菜过程,体现了设计的创新原则 B、该设计能够节约洗菜时的用水量,体现了设计的可持续发展原则 C、该产品外形美观,满足了使用者的生理需求 D、清洗沥水快速完成,体现了人机关系的高效目标
A、该设计能够简化洗菜过程,体现了设计的创新原则 B、该设计能够节约洗菜时的用水量,体现了设计的可持续发展原则 C、该产品外形美观,满足了使用者的生理需求 D、清洗沥水快速完成,体现了人机关系的高效目标 -
10、传统的牙刷架基本由水杯代替,不易清洗且容易使牙刷上滋生细菌。如图所示为牙刷置物架兼消毒器,可以及时给牙刷消毒。从人机关系角度分析,下列说法中不合理的是( )
 A、一键启动紫外线消毒,快速方便,体现了人机关系高效的目标 B、牙刷置物架安装高度要适当,方便取放,主要考虑了人的动态尺寸 C、置物架有多种颜色、卡通图案可选,满足了人的心理需求 D、牙刷消毒过程中,会有红色指示灯亮起,体现了信息的交互
A、一键启动紫外线消毒,快速方便,体现了人机关系高效的目标 B、牙刷置物架安装高度要适当,方便取放,主要考虑了人的动态尺寸 C、置物架有多种颜色、卡通图案可选,满足了人的心理需求 D、牙刷消毒过程中,会有红色指示灯亮起,体现了信息的交互 -
11、如图所示为鼠标加热垫,下列说法不恰当的是( )
 A、防水不渗透,安全不漏电,体现了人机关系安全的目标 B、精密锁边,美观耐用,体现了设计的实用原则 C、超大加厚,皮革定制,手感舒适,考虑了人的生理和心理需求 D、三档调温,采用新型的发热芯片,体现设计是技术发展的重要驱动力
A、防水不渗透,安全不漏电,体现了人机关系安全的目标 B、精密锁边,美观耐用,体现了设计的实用原则 C、超大加厚,皮革定制,手感舒适,考虑了人的生理和心理需求 D、三档调温,采用新型的发热芯片,体现设计是技术发展的重要驱动力 -
12、公园里有很多大人带着小朋友玩,小明发现,很多小朋友在草地、山坡等地玩累了需要休息时,很难在附近找到适合他们坐的椅子。由此,小明想为小朋友设计一款户外活动时携带方便的小凳。请完成以下小题。(1)、小明发现问题的途径是( )A、观察日常生活 B、技术研究和技术试验 C、收集和分析信息 D、灵感激发(2)、小明设计便携式小凳时,有部分工作步骤为①对多个设计方案进行评价,根据评价结果筛选一个最佳方案;②设计多个方案,并用草图把它们呈现出来;③小明经过调查研究,列出了小凳的设计要求;④根据设计方案绘制图样并制作小凳模型。下列选项符合设计的一般过程的是( )A、②④③① B、③①④② C、③②①④ D、②③①④
-
13、下列产品的性能测试采用的试验方法不恰当的是( )A、在小板凳上不断增加重物测试小板凳的最大承重力—模拟试验法 B、对五种不同品牌的保温瓶装入相同温度的热水,然后间隔相同的时间测量温度变化,选出保温性能最优的品牌—优选试验法 C、在特定的条件下测出日光灯管的使用寿命—强化试验法 D、利用计算机软件在计算机上进行的“氢气和氧气的混合气体爆炸”试验—虚拟试验法
-
14、小明要设计一款木质可折叠的台灯,在制订设计方案过程中不需要做的是( )A、查找相关设计
 B、研究折叠方案
B、研究折叠方案 C、了解可能会用到的连接件
C、了解可能会用到的连接件 D、测速折叠处的牢固程度
D、测速折叠处的牢固程度
-
15、小明看到讲桌上的粉笔盒、黑板檫、抹布等摆放的乱七八糟,于是他想设计一个储物盒。下列设计步骤正确的排序是( )
①收集、整理与多功能储物盒相关信息
②明确设计的要求
③制订设计方案,并绘制多功能储物盒的加工图样
④制作模型或原型并进行相关测试
A、②①④③ B、②①③④ C、③①②④ D、③②①④ -
16、如图所示为某款磁吸式手机无线充电器。下列相关说法中不正确的是( )

 A、磁吸技术的应用为无线充电器的设计提供了基础 B、内置磁铁能直接吸附在手机上进行无线充电,体现了设计的实用原则 C、兼容 Qi 无线充电国际标准,体现了设计的技术规范原则 D、较强的吸力吸附手机,防止意外跌落,体现了设计的安全原则
A、磁吸技术的应用为无线充电器的设计提供了基础 B、内置磁铁能直接吸附在手机上进行无线充电,体现了设计的实用原则 C、兼容 Qi 无线充电国际标准,体现了设计的技术规范原则 D、较强的吸力吸附手机,防止意外跌落,体现了设计的安全原则 -
17、如图所示是一款多功能角磨机,具有切割、打磨、除锈等功能。下列关于该工具的说法中,不恰当的是( )
 A、采用无刷电机技术,提供强劲动力的同时实现降噪功能,体现了设计是技术的基础 B、具有切割、打磨、除锈等功能,体现了技术的目的性 C、全新辅助手柄,增大摩擦力,操作更省力,体现了技术解放人的作用 D、在研发过程中,攻克了噪音、震动等多方面技术难关,体现了技术的实践性
A、采用无刷电机技术,提供强劲动力的同时实现降噪功能,体现了设计是技术的基础 B、具有切割、打磨、除锈等功能,体现了技术的目的性 C、全新辅助手柄,增大摩擦力,操作更省力,体现了技术解放人的作用 D、在研发过程中,攻克了噪音、震动等多方面技术难关,体现了技术的实践性 -
18、玉兔号是中国首辆月球车,它和着陆器共同组成嫦娥三号探测器。玉兔号月球车设计质量140千克,以太阳能为能源,能耐受月表的极端环境。月球车具备20度爬坡能力,配备全景相机、红外成像光谱仪、测月雷达等科学探测仪器。下列关于月球车的说法中恰当的是( )
 A、玉兔号月球车配备全景相机、红外成像光谱仪、测月雷达等科学探测仪器,体现了技术的综合性 B、在研发制作该月球车的过程中,运用了许多最前沿的科技,体现了技术的实践性 C、玉兔号是中国首辆月球车,自发明之日起自动获得相关专利,体现了技术的专利性 D、玉兔号月球车成功登月提升了我国科研人员对月球的认知,体现了技术具有解放人的作用
A、玉兔号月球车配备全景相机、红外成像光谱仪、测月雷达等科学探测仪器,体现了技术的综合性 B、在研发制作该月球车的过程中,运用了许多最前沿的科技,体现了技术的实践性 C、玉兔号是中国首辆月球车,自发明之日起自动获得相关专利,体现了技术的专利性 D、玉兔号月球车成功登月提升了我国科研人员对月球的认知,体现了技术具有解放人的作用 -
19、小明发现在晾晒衣服时,由于衣服的湿度很大,经常导致衣服的前后两面贴合在一起(如图b),导致衣服阴天晾干时间变长。小明想对家里的木制衣架(如图a)进行改造,在A、B两点之间增加一根连杆,使之可以撑开衣服的前后两面(如图c),以增加衣服晾干的速度。请你设计衣架的连杆部分,设计要求如下:

图a 图b 图c
A.晾晒衣服时连杆可以将衣服的前后两面撑开100mm;
B.不晒衣服时连杆基本不会影响衣架的收纳;
C.可以对衣架进行适当加工;
D.结构简单,连接可靠;
E.材料自选,并注明所选材料。
(1)、请你在头脑中构思符合设计要求的多个方案,画出其中最优方案的设计草图,必要时可以用文字补充说明;(2)、在草图上标注主要尺寸。 -
20、请补全三视图中所缺的2条图线(超过2条图线倒扣分)。
