相关试卷
- 江苏省镇江市2015-2016学年九年级物理中考二模试卷
- 江苏省镇江市丹阳三中2015-2016学年九年级物理中考一模试卷
- 江苏省扬州市邵樊片2015-2016学年九年级物理中考二模试卷
- 江苏省扬州市广陵区2015-2016学年九年级物理第二次模拟考试试卷
- 江苏省盐城市盐都区西片2015-2016学年九年级下学期物理第三次模拟试卷
- 江苏省无锡市新区2015-2016学年物理第二次中考模拟考试试卷
- 江苏省泰州市沿江区域2015-2016学年九年级物理第二次模拟考试卷
- 江苏省泰州市靖江、兴化、泰兴三校2015-2016学年九年级下学期物理二模试卷
- 江苏省泰州市姜堰四中2015-2016学年九年级物理中考一模试卷
- 江苏省泰州市姜堰四中2015-2016学年九年级模物中考二理试卷
-
1、神舟二十号航天员乘组在中国空间站通过波与地面联系,遥祝亿万同胞端午安康,航天员吃粽子时,粽香扑鼻是现象。
-
2、2025年5月29日,搭载天问二号探测器的长征三号乙运载火箭在西昌卫星发射中心成功发射。探测器与火箭一起升空的过程中,探测器相对于火箭是的,相对于地面是的。
-
3、如图(a),电源电压保持不变,电流表量程0~0.6A,电压表量程0~15V。在保证各元件安全的情况下(灯泡两端的电压不超过额定电压,电表均不超过量程),进行下列操作:只闭合S1、S2 , 最大范围内移动滑动变阻器滑片P,电流表示数与滑动变阻器接入电路的阻值的关系如图(b)所示;只闭合S3 , 滑片P从最右端向左滑动,直至灯泡正常发光,电流表示数与电压表示数的关系如图(c)所示。下列说法正确的是( )
 A、电源电压为5V B、小灯泡的额定功率为2.64W C、小灯泡工作时的最小电压为1V D、只闭合S1、S2与只闭合S2、S3 , 滑动变阻器允许接入电路的最小电阻之比为5:1
A、电源电压为5V B、小灯泡的额定功率为2.64W C、小灯泡工作时的最小电压为1V D、只闭合S1、S2与只闭合S2、S3 , 滑动变阻器允许接入电路的最小电阻之比为5:1 -
4、来自物体的光经过照相机镜头后会聚在胶片上,形成该物体的像。下列说法正确的是( )A、镜头相当于一个凸透镜 B、镜头相当于一个凹透镜 C、像是倒立的 D、像是正立的
-
5、在2025年世界乒乓球锦标赛中,我国运动员获得4枚金牌。比赛时,运动员抛出的乒乓球在上升的过程中( )A、运动状态保持不变 B、受到惯性的作用 C、重力势能变大 D、质量不变
-
6、如图,北极熊趴在冰面上爬过薄冰,这样避免了冰面被压破。“趴”的作用是( )
 A、增大压强 B、减小压强 C、增大压力 D、减小压力
A、增大压强 B、减小压强 C、增大压力 D、减小压力 -
7、厨房不仅是加工食材的场所,也是充满物态变化的“实验室”。从冰箱的冷藏室中取出一瓶矿泉水,过一会儿瓶外壁变湿了,这是因为空气中的水蒸气发生了( )A、液化 B、熔化 C、凝固 D、汽化
-
8、下列实例中,通过做功的方式来改变内能的是( )A、冰镇西瓜 B、炭火烤肉 C、围炉煮茶 D、钻木取火
-
9、某同学在某湿地公园看到了美丽的水鸟。水鸟在平静的水中形成的倒影( )A、是虚像 B、是实像 C、比水鸟大 D、比水鸟小
-
10、如图,陶笛是我国历史悠久的乐器。吹奏时,手指按在不同的音孔上,是为了改变它发出声音的( )
 A、音色 B、响度 C、音调 D、声速
A、音色 B、响度 C、音调 D、声速 -
11、我国自主研发的IGBT芯片是高铁强劲有力的心脏。制造芯片的硅材料是( )A、导体 B、绝缘体 C、半导体 D、超导体
-
12、小明在“测定小灯泡电阻”的实验中,设计的电路图如图甲所示。
 (1)、测量过程中,某一次的电流值如图乙所示,则电流值是A;若灯丝突然烧断,则电压表的示数会(选填“变大”、“变小”或“不变”);(2)、换相同规格的灯泡,重新实验,根据测得的数据绘出I﹣U图像如图丙中的A所示,A是一条曲线而不是一条直线,说明灯丝的电阻是变化的,原因是;(3)、另外一组同学用相同的器材和电路图也做这实验时,由于接线错误,根据测量的数据绘出的I﹣U图像如图丙中的B所示。你认为错误的原因可能是;(4)、小明同时利用器材测出定值电阻与小灯泡的阻值并绘制出I﹣U图像,如图丁中a、b所示,分析图像中A、B、C三点电阻RA、RB、RC , 则电阻值最大的是;(5)、小明利用连接好的甲图电路测量小灯泡电功率,闭合开关时记录了第1组数据,当小灯泡正常发光时记录了第2组数据,把滑片移到左端点时小灯泡闪亮一下,后熄灭,并记录了第3组数据,如表所示,则他所用灯泡的额定功率为W,滑动变阻器的最大阻值Ω。
(1)、测量过程中,某一次的电流值如图乙所示,则电流值是A;若灯丝突然烧断,则电压表的示数会(选填“变大”、“变小”或“不变”);(2)、换相同规格的灯泡,重新实验,根据测得的数据绘出I﹣U图像如图丙中的A所示,A是一条曲线而不是一条直线,说明灯丝的电阻是变化的,原因是;(3)、另外一组同学用相同的器材和电路图也做这实验时,由于接线错误,根据测量的数据绘出的I﹣U图像如图丙中的B所示。你认为错误的原因可能是;(4)、小明同时利用器材测出定值电阻与小灯泡的阻值并绘制出I﹣U图像,如图丁中a、b所示,分析图像中A、B、C三点电阻RA、RB、RC , 则电阻值最大的是;(5)、小明利用连接好的甲图电路测量小灯泡电功率,闭合开关时记录了第1组数据,当小灯泡正常发光时记录了第2组数据,把滑片移到左端点时小灯泡闪亮一下,后熄灭,并记录了第3组数据,如表所示,则他所用灯泡的额定功率为W,滑动变阻器的最大阻值Ω。物理量
实验序号
电压表示数
电流表示数
小灯亮暗程度
1
1.3V
0.16A
暗
2
2.5V
0.26A
正常发光
3
4.5V
0A
不发光
-
13、在学校突然停电时,应急灯就会亮起,如图所示,应急灯亮起时应急灯内的蓄电池相当于电路中的( )
 A、用电器 B、电源 C、导线 D、开关
A、用电器 B、电源 C、导线 D、开关 -
14、阅读下文,完成各题。
航天器的“轨道守护者”——霍尔电推进器
航天器的轨道维持依赖推进技术,主要分为化学推进和电推进。化学推进通过燃烧推进剂产生高压燃气喷出形成推力;而电推进则利用电能电离推进剂(如氙气),通过强电场加速离子喷出产生推力。根据公式:推力=质量流量×喷出速度,电推进的喷出速度可达化学推进的10倍以上,因此在相同推力下,电推进消耗的推进剂更少。
我国空间站运行在400km高度的轨道上,受稀薄大气阻力影响,轨道高度每天下降约70米。若使用化学推进器维持轨道,每年需消耗数吨燃料,成本高昂。为此,天和核心舱配备了4台总推力为0.32牛的霍尔电推进器,其低燃料消耗特性显著降低了运营成本。
(1)、化学推进与电推进的共同点是( )A、均需燃烧推进剂 B、均通过反作用力产生推力 C、喷出速度相同 D、能量来源均为化学能(2)、若某电推进器的质量流量为5×10-6kg/s,喷出速度为2×104m/s,其推力为牛;(3)、请估算我国空间站绕地球运行一周所需的时间:分钟;(π取3,运行速度取8km/s,地球半径取6400km)(4)、为什么我国空间站选择霍尔电推进器而非化学推进器?请简述理由:。 -
15、阅读短文,回答问题。
智能机器人
随着计算机、微电子、信息技术的快速进步,智能机器人技术的开发速度越来越快,智能度越来越高,是因为它有相当发达的“大脑”,具备形形色色的内部信息传感器和外部信息传感器,它还有效应器,通过电动机使手、脚、鼻子、触角等动起来。智能机器人能用人类语言同操作者对话,有着其他材质不可替代的优点。智能机器人的电源主要有钠硫电池、镍镉电池、锂电池等。
表格中是某款智能机器人的信息。随着智能机器人技术的不断发展和成熟,它将走进千家万户,服务人们的生活。
锂电池
电压
25V
容量Q=It
10A•h
电动机
额定电压
25V
额定功率
100W
(1)、锂电池充电时电能转化为能。(2)、关于智能机器人,下列说法正确的是 ___________。A、智能机器人效应器通过电动机使手、脚动起来时,是将机械能转化为电能 B、机器人安装带有凸起棱的宽大履带,既为了增大摩擦,又为了减小压强 C、智能机器人能与人语音对话,说明了电磁波能传递能量(3)、某智能机器人站着发射超声波,经过0.06s后收到障碍物的回波,则该智能机器人与障碍物间的距离约为m。该智能机器人靠底座轮子驱动,其驱动电动机的具体参数如表格所示,若该智能机器人的驱动电动机线圈电阻为0.2Ω,则电动机正常工作下的发热功率为W。(设超声波在空气中的传播速度为340m/s)(4)、若当剩余电量减为电池容量的10%时,该智能机器人会主动寻找充电器充电,则充满电后至下一次自动充电前该智能机器人能够连续正常工作的最长时间为h。为确保该智能机器人能顺利返回充电,假设需要充电时离充电器最远路程不能超过300m,则该智能机器人返回过程中受到的水平阻力为N。(剩余电池容量的30%用于提供克服阻力做功) -
16、在“探究滑动摩擦力的大小与什么因素有关”时,发现在木块没有被拉动时,弹簧测力计也有示数,且示数会变化,当示数增加到某一值时,木块开始运动,但随即弹簧测力计示数减小,木块匀速滑动时弹簧测力计示数不变,接着弹簧测力计示数变小时,木块慢慢停下。根据实验数据画出了拉力随时间变化的F-t图象,如乙图有关说法正确的是( )
 A、0~4s时,木块受到的阻力大于拉力 B、4~8s时,木块受的滑动摩擦力为3N C、8~10s时,木块受到的滑动摩擦力小于3N D、若把木块侧放,则测得木块受到的滑动摩擦力不等于3N
A、0~4s时,木块受到的阻力大于拉力 B、4~8s时,木块受的滑动摩擦力为3N C、8~10s时,木块受到的滑动摩擦力小于3N D、若把木块侧放,则测得木块受到的滑动摩擦力不等于3N -
17、阅读短文,回答问题:
电动汽车
某品牌电动汽车(如图1)车身采用大量轻而坚硬的碳纤维材料,地板位置安装有电池系统,如表为电池系统的部分参数。
电池系统可用能量
72kW·h
电量—里程转换率
160W·h/km
充电时间
交流慢充
6h
直流快充
0.6h
目前电动汽车主流的充电方式为智能恒功率充电,充电电压U和充电电流I的变化如图2所示,第一阶段为限流段,即为预充阶段;第二阶段为恒流段,该过程充电电流保持不变,充电电压稳定增加;第三阶段为恒功率段,该过程充电功率保持恒定;第四阶段为恒压段,即浮充阶段,充电电流不断减小,直至充满。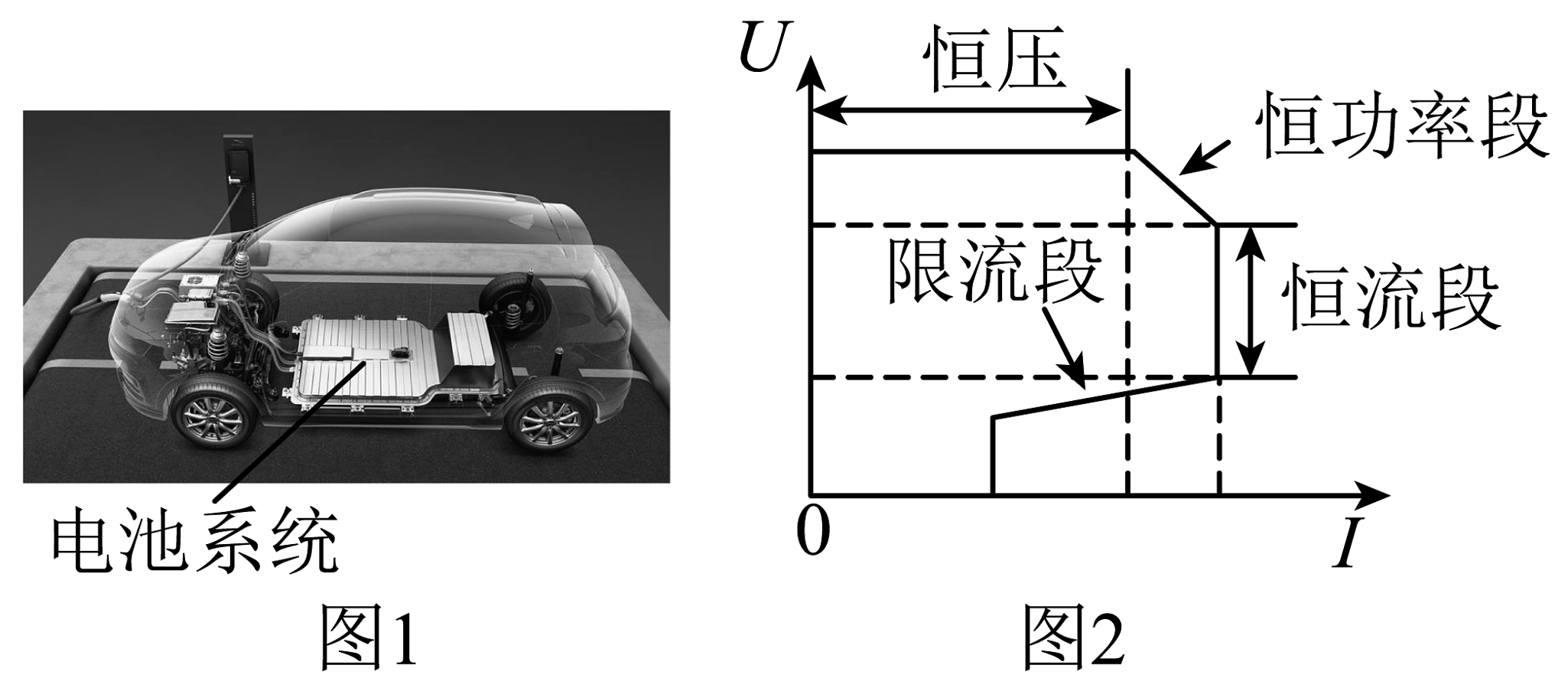
(1)车身采用大量碳纤维材料,是因为碳纤维不仅小而且硬度大;
(2)电动车需紧急出行而电量不足时,应选择(直流/交流)充电方式;
(3)电池充电至某一阶段时,充电电压不断增加,充电电流不断减小,该阶段为;
A.限流段 B.恒流段 C.恒功率段 D.恒压段
(4)电池充满电后,理论续航里程为km;
(5)在充电恒压段,电池能量E随时间t变化的图像为。
A.
 B.
B. C.
C. D.
D.
-
18、图甲为某款机器人,质量为30kg,其底部轮子与地面接触的总面积为150cm2 , 它在某次工作中沿直线行走的速度随时间变化的图象如图乙所示,水平方向上受到的阻力与自身质量的关系图象如图丙所示。(g取10N/kg)求:
(1)机器人静止在水平地面上时,对地面产生的压强。
(2)机器人在0~10s内的平均速度。
(3)在0~6s内机器人牵引力做功的功率。

-
19、小宇同学想利用学过的知识测量木块的密度(不考虑木块吸水),主要过程如下:
 (1)、小宇把天平放在水平桌面上,将游码拨至标尺的零刻度线处,指针位置如图甲所示,此时应将平衡螺母向(选填“左”或“右”)调,直至天平平衡。(2)、在测量杯子和水的质量时,小宇用镊子往天平的右盘(选填“从小到大”或“从大到小”)试加砝码,并移动游码,直至天平平衡,这时右盘中的砝码和游码所在的位置如图乙所示,则杯子和水的总质量为g,用同样方法测出木块的质量为18g。(3)、如图丙所示,将一个金属块放在木块上,一起放入杯子中,使木块恰好浸没在水中,测出此时的总质量为132g,则金属块的质量为 g,木块受到的浮力为N,木块的密度为。(计算时g取)
(1)、小宇把天平放在水平桌面上,将游码拨至标尺的零刻度线处,指针位置如图甲所示,此时应将平衡螺母向(选填“左”或“右”)调,直至天平平衡。(2)、在测量杯子和水的质量时,小宇用镊子往天平的右盘(选填“从小到大”或“从大到小”)试加砝码,并移动游码,直至天平平衡,这时右盘中的砝码和游码所在的位置如图乙所示,则杯子和水的总质量为g,用同样方法测出木块的质量为18g。(3)、如图丙所示,将一个金属块放在木块上,一起放入杯子中,使木块恰好浸没在水中,测出此时的总质量为132g,则金属块的质量为 g,木块受到的浮力为N,木块的密度为。(计算时g取) -
20、在学习液体压强时,老师让小明利用压强计探究液体内部压强的特点,进行了如下的操作。
 (1)、实验前,小明按要求安装好实验器材,如图甲所示,此时压强计(选填“是”或“不是”)连通器;(2)、小明没有按压橡皮膜时,发现U形管两侧液面就存在高度差(如图甲所示),接下来的操作是( )(填字母选项);A、从U形管内向外倒出适量水 B、拆除软管重新安装 C、向U形管内添加适量水(3)、小明要得到“液体深度相同时,液体密度越大,压强越大”的结论,他应该选图(选填“乙和丙”或“丙和丁”)进行实验;(4)、正确操作后,分析图乙、图丙的实验现象,可以得出结论:同种液体中,液体压强随液体深度的增加而;(5)、在探究液体内部压强与液体的密度关系时,小华认为两烧杯中的液面必须相平,你(选填“赞同”或“不赞同”)此观点,理由是。
(1)、实验前,小明按要求安装好实验器材,如图甲所示,此时压强计(选填“是”或“不是”)连通器;(2)、小明没有按压橡皮膜时,发现U形管两侧液面就存在高度差(如图甲所示),接下来的操作是( )(填字母选项);A、从U形管内向外倒出适量水 B、拆除软管重新安装 C、向U形管内添加适量水(3)、小明要得到“液体深度相同时,液体密度越大,压强越大”的结论,他应该选图(选填“乙和丙”或“丙和丁”)进行实验;(4)、正确操作后,分析图乙、图丙的实验现象,可以得出结论:同种液体中,液体压强随液体深度的增加而;(5)、在探究液体内部压强与液体的密度关系时,小华认为两烧杯中的液面必须相平,你(选填“赞同”或“不赞同”)此观点,理由是。