相关试卷
-
1、如图所示是一把喷水太阳伞,伞的顶部有风扇和喷雾装置。下列关于该伞的设计分析和评价中不正确的是( )
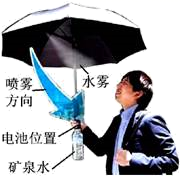 A、能给使用者带来清凉的感觉,主要考虑了人的因素 B、夏日用水雾降温,符合设计的实用原则 C、增加了制造成本,不符合设计的经济原则 D、利用风扇吹动水雾,考虑到了物的因素
A、能给使用者带来清凉的感觉,主要考虑了人的因素 B、夏日用水雾降温,符合设计的实用原则 C、增加了制造成本,不符合设计的经济原则 D、利用风扇吹动水雾,考虑到了物的因素 -
2、如图所示的测试是用无人机撞击假人,在假人的头部和颈部装了传感器,用来测量加速度和力,将数据传给计算机并进行分析对人可能造成的伤害程度。这种技术试验方法属于( )
 A、模拟试验 B、强化试验 C、预测试验 D、虚拟试验
A、模拟试验 B、强化试验 C、预测试验 D、虚拟试验 -
3、如图所示是一款智能勺子,勺柄上的液晶屏能够数显重量和温度,便于掌握烹饪时调味品的用量和火候,但由于内置了精密传感器,用后不能水洗。以下关于该智能勺子的说法,不正确的是( )
 A、能够数显重量和温度,体现技术的创新性 B、便于掌握烹饪时调味品的用量和火候,体现技术的目的性 C、外部有液晶屏,内部有精密传感器,体现技术的综合性 D、该智能勺子可以申请专利,保护发明人的权益
A、能够数显重量和温度,体现技术的创新性 B、便于掌握烹饪时调味品的用量和火候,体现技术的目的性 C、外部有液晶屏,内部有精密传感器,体现技术的综合性 D、该智能勺子可以申请专利,保护发明人的权益 -
4、如图1所示是一款办公区域的隔离门,隔离门两端分别装有转动轴和限位轴(两轴间距100 mm),实现隔离门的竖起固定和翻转放下。隔离门放下时,人可以从上面跨过。请在护栏和隔离门之间设计能实现该功能的合理的连接件。已知护栏边框的材料为1 000 mm×60 mm×40 mm的实木,制作连接件的材料是如图2所示的角钢,其他配件自选。设计要求如下:

A.连接件能可靠地固定在护栏门框上,具有足够连接强度;
B.隔离门连接后能竖起和放下,竖起时固定可靠;
C.结构简单。
请根据上述要求完成以下任务:
(1)、①画出连接件的设计草图,必要时可用文字说明②在设计草图上标注连接件的主要尺寸;
(2)、 从设计的一般过程来看,完成设计草图确定设计方案后,接下来要做的工作是(从①设计分析;②产品加工;③性能的测试及优化;④技术图样的绘制中选一项,填序号);(3)、 在加工过程中,为了防止连接件生锈,可以采用的方法有、(从①电镀;②表面抛光;③喷涂油漆中选二项,填序号);(4)、以下零件中,最适合用来固定该连接件的是(选一项,填序号)。
-
5、 请补全三视图中所缺的3条图线
-
6、如图所示是一款木质支架,该支架可用于放置书本或者平板电脑,角度可调,操作者可以选择舒适的操作角度,具有可折叠,便于携带的特点。请根据示意图和描述,完成以下任务:
 (1)、 有了该支架,使用者不需要低头操作,可以防止颈椎病,此外支架角度可调,使用者可以选择合适的操作角度,实现了人机关系的、目标(在A .高效;B .舒适;C .安全;D .健康中选择合适的选项,将序号填入横线处)(2)、 该支架可折叠设计,可以减少仓储和运输空间,体现了设计的原则(在A .实用原则;B .美观原则;C .技术规范原则中选择合适的选项,将序号填入横线处)(3)、以下为角度调节木质卡槽方案的设计,其中最合理的是____;A、
(1)、 有了该支架,使用者不需要低头操作,可以防止颈椎病,此外支架角度可调,使用者可以选择合适的操作角度,实现了人机关系的、目标(在A .高效;B .舒适;C .安全;D .健康中选择合适的选项,将序号填入横线处)(2)、 该支架可折叠设计,可以减少仓储和运输空间,体现了设计的原则(在A .实用原则;B .美观原则;C .技术规范原则中选择合适的选项,将序号填入横线处)(3)、以下为角度调节木质卡槽方案的设计,其中最合理的是____;A、 B、
B、 C、
C、 (4)、加工角度调节木质卡槽,需要用到的工具是(在A .划针;B .墨斗;C .木工锯中选择合适的选项,将序号填入横线处)(5)、图中支撑杆与支架板采用铰连接,合适的连接方式是(在A .合页;B .自攻螺钉;C .螺栓螺母中选择合适的选项,将序号填入横线处)
(4)、加工角度调节木质卡槽,需要用到的工具是(在A .划针;B .墨斗;C .木工锯中选择合适的选项,将序号填入横线处)(5)、图中支撑杆与支架板采用铰连接,合适的连接方式是(在A .合页;B .自攻螺钉;C .螺栓螺母中选择合适的选项,将序号填入横线处) -
7、如图a所示是某自动对位控制系统的示意图。其工作过程:摄像机连续获取被测物体的实时位置信息(如图b所示),工控机将接收到的位置信息不断与设定位置进行比较,计算出被测物体的偏移值,控制平台驱动器驱动平台移动和转动,使被测物体运动到设定位置(如图c所示)。
 (1)、关于该自动对位控制系统,下列分析中不恰当的是( )A、具有自动对位功能,体现了系统的目的性 B、摄像机长期使用后清晰度隆低,体现了系统的动态性 C、X、Y平台的移动精度会影响平台的定位精度,体现了系统的相关性 D、可应用于印刷、电子加工等行业,体现了系统的整体性(2)、下列关于该自动对位控制系统分析中正确的是( )A、控制量是被测物体的偏移值 B、该系统属于闭环控制系统 C、摄取像机用来获取输入量 D、被控量是设定位置
(1)、关于该自动对位控制系统,下列分析中不恰当的是( )A、具有自动对位功能,体现了系统的目的性 B、摄像机长期使用后清晰度隆低,体现了系统的动态性 C、X、Y平台的移动精度会影响平台的定位精度,体现了系统的相关性 D、可应用于印刷、电子加工等行业,体现了系统的整体性(2)、下列关于该自动对位控制系统分析中正确的是( )A、控制量是被测物体的偏移值 B、该系统属于闭环控制系统 C、摄取像机用来获取输入量 D、被控量是设定位置 -
8、如图所示是某制药厂的废水处理流程图。下列对该流程的分析中正确的是( )
 A、过滤和焚烧环节是串行工序 B、注人空气与回流是并行工序 C、接触氧化环节所处理的废水均来自水解吸附环节 D、压滤与过滤环节可以互换
A、过滤和焚烧环节是串行工序 B、注人空气与回流是并行工序 C、接触氧化环节所处理的废水均来自水解吸附环节 D、压滤与过滤环节可以互换 -
9、如图所示是一款家庭健身用的液压踏步机,采用加厚钢管和ABS材料,实时显示卡路里消耗情况,静音设计。下列关于该踏步机的分析中,正确的是( )
 A、增加两底座间距,可提高其稳固性 B、底座套的作用仅仅为了保护地面 C、踩下踏板时,踏板受弯曲、转轴受剪切 D、踩下踏板时,支撑板受弯曲、活塞杆受压
A、增加两底座间距,可提高其稳固性 B、底座套的作用仅仅为了保护地面 C、踩下踏板时,踏板受弯曲、转轴受剪切 D、踩下踏板时,支撑板受弯曲、活塞杆受压 -
10、如图所示为某工件的技术图样。
 (1)、图中漏标的尺寸有( )A、1处 B、2处 C、3处 D、4处(2)、在实验室用钢板手工加工该工件,下列说法中不正确的是( )A、3个圆孔都可以在台钻上进行加工 B、角尺在划线和测量过程中都需要用到 C、R10倒角不能用平锉进行加工 D、梯形槽可采用钻孔、锯割、锉削的加工方法
(1)、图中漏标的尺寸有( )A、1处 B、2处 C、3处 D、4处(2)、在实验室用钢板手工加工该工件,下列说法中不正确的是( )A、3个圆孔都可以在台钻上进行加工 B、角尺在划线和测量过程中都需要用到 C、R10倒角不能用平锉进行加工 D、梯形槽可采用钻孔、锯割、锉削的加工方法 -
11、小明构思了下列简易杯托方案,安装在如图所示的书桌侧边的木板上,用来放置水杯,主要考虑夹持的稳定性和安全性,下列方案最合理的是( )
 A、
A、 B、
B、 C、
C、 D、
D、
-
12、如图所示是一款带电源的折叠手机支架及其评价坐标图,以下有关坐标图的分析中不合理的是( )
 A、该产品的价格指标得2分,说明价格普遍高于同类产品的价格 B、方块状折叠设计,符合技术规范 C、该评价是对设计成果的评价 D、该评价的部分指标是依据设计的一般原则
A、该产品的价格指标得2分,说明价格普遍高于同类产品的价格 B、方块状折叠设计,符合技术规范 C、该评价是对设计成果的评价 D、该评价的部分指标是依据设计的一般原则 -
13、如图所示是一款自助体检系统,体检人可自助完成体检。整个机器占地面积不到3平方米,可安装在驾校、考场、车管所等场所使用。下列相关表述不正确的是( )
 A、机器配有二维码支付功能,需要支付才能使用,体现了技术的两面性 B、机器利用超声波测距、计算机软件、触控和图像处理技术,体现了技术的综合性 C、机器能自动对体检人员身高、体重、视力等做出检测,体现了技术的目的性 D、体检人可自助完成,节省了人员配置,体现技术具有解放人的作用
A、机器配有二维码支付功能,需要支付才能使用,体现了技术的两面性 B、机器利用超声波测距、计算机软件、触控和图像处理技术,体现了技术的综合性 C、机器能自动对体检人员身高、体重、视力等做出检测,体现了技术的目的性 D、体检人可自助完成,节省了人员配置,体现技术具有解放人的作用 -
14、请补全三视图中所缺的3条图线

-
15、小明从有关资料上获悉,工程师在建造摩天大楼时,会在摩天大楼恰当的位置悬挂一个防风阻尼器,以抵消风吹引起的晃动。小明为了探究其中的原理,用如图所示的木制房模、弹簧片(4块)、木底板、小球等组合成试验装置,用于模拟受到风吹后的晃动情况。现需要设计连接件,要求如下:
①弹簧片一端通过连接件固定在房模的底面上,另一端通过连接件固定在木底板的上表面;
②房模静止时保持竖直,受风力后能晃动;
③材料选用2mm厚的钢板,其他零件自选;请根据描述和设计要求完成以下任务:

 (1)、现要从钢板上锯下一块用于制作连接件。下列锯割操作不合理的是 (在下列选项中选择合适的选项,将序号填入横线处);A、安装锯条时,锯齿朝前 B、左手紧握钢板,右手锯割 C、推锯加压,回拉不加压 D、锯程要长(2)、①画出连接件的设计草图(相同的只需画一个),必要时可用文字说明;
(1)、现要从钢板上锯下一块用于制作连接件。下列锯割操作不合理的是 (在下列选项中选择合适的选项,将序号填入横线处);A、安装锯条时,锯齿朝前 B、左手紧握钢板,右手锯割 C、推锯加压,回拉不加压 D、锯程要长(2)、①画出连接件的设计草图(相同的只需画一个),必要时可用文字说明;②在设计草图上标注主要尺寸;
(3)、小明的试验方案如下:①不悬挂小球,选择一个风扇挡位,对准房模,间歇性吹风,观察和记录房模的晃动情况;
②同一小球悬挂于不同高度,选择与①相同的风扇档位,对准房模,间歇性吹风,观察和记录房模的晃动情况;
③换一个直径相同质量不同的小球,再接着同②步骤做相同的试验。
不是上述试验目的的是 (在下列选项中选择合适的选项,将序号填入横线处);
A、观察房模晃动情况与小球质量是否有关 B、观察房模晃动情况与小球悬挂高度是否有关 C、观察房模晃动情况与房模的质量是否有关(4)、上述采用的试验方法属于 (在下列选项中选择合适的选项,将序号填入横线处)A、虚拟试验法 B、模拟试验法 C、强化试验法 -
16、如图所示为疫情期间热销的防护用品 N95 型口罩。N95 型口罩能对空气动力学直径 0.075µm±0.02µm颗粒的过滤效率达到 95%以上,以下是N95 型口罩的生产流程。
请根据题干,回答以下问题:
 (1)、为优化该口罩生产流程,在贴上鼻梁垫环节之后加入了消毒灭菌环节,从流程优化角度分析属于(在A .工期优化;B .工艺优化;C .质量优化;D .成本优化中选择合适的一项,将序号填入横线处);(2)、N95型口罩出厂前,要符合 N95 标准,并且通过 NIOSH 审查,这体现了设计的(在A .实用原则; B .经济原则;C .技术规范原则;D .可持续发展原则中选择合适的选项,将序号填入横线处);(3)、N95口罩在制造过程中体现了人机关系舒适目标的是 (在 A .可折叠设计;B .柔软的鼻梁垫;C .采用高效的静电过滤棉;D .简洁的白色外表中选择合适的选项,将序号填入横线中);在整个生产过程中,由于口罩的核心原料熔喷布的紧缺,自动化口罩机常常不得已停机,这体现了系统的(在 A .综合性;B .整体性;C .环境适应性;D .相关性中选择合适的选项,将序号填入横线处);(4)、从系统优化的角度分析,属于影响系统优化因素的是 、(在 A . N95 国家标准;B .鼻梁架的焊接技术;C .口罩生产机传送带的速度;D .电网电压的波动中选择合适的选项,将序号填入横线处)。
(1)、为优化该口罩生产流程,在贴上鼻梁垫环节之后加入了消毒灭菌环节,从流程优化角度分析属于(在A .工期优化;B .工艺优化;C .质量优化;D .成本优化中选择合适的一项,将序号填入横线处);(2)、N95型口罩出厂前,要符合 N95 标准,并且通过 NIOSH 审查,这体现了设计的(在A .实用原则; B .经济原则;C .技术规范原则;D .可持续发展原则中选择合适的选项,将序号填入横线处);(3)、N95口罩在制造过程中体现了人机关系舒适目标的是 (在 A .可折叠设计;B .柔软的鼻梁垫;C .采用高效的静电过滤棉;D .简洁的白色外表中选择合适的选项,将序号填入横线中);在整个生产过程中,由于口罩的核心原料熔喷布的紧缺,自动化口罩机常常不得已停机,这体现了系统的(在 A .综合性;B .整体性;C .环境适应性;D .相关性中选择合适的选项,将序号填入横线处);(4)、从系统优化的角度分析,属于影响系统优化因素的是 、(在 A . N95 国家标准;B .鼻梁架的焊接技术;C .口罩生产机传送带的速度;D .电网电压的波动中选择合适的选项,将序号填入横线处)。 -
17、中国航母“辽宁舰”是一个庞大的系统,需要配备电子设备,舰载机、预警机、防空武器等才能发挥其作用,从系统角度分析,下列说法不恰当的是( )
 A、能搭载的30架舰载机和直升机,达到了航母作为移动作战平台的目的 B、舰载机需要预警机提供目标信息,预警机需要舰载机的保护,两者具有相关性 C、舰载机与航母是两个互不相关的系统 D、配备了相控阵雷达在内的各种新型电子设备,优化了防空以及末端反导防御系统
A、能搭载的30架舰载机和直升机,达到了航母作为移动作战平台的目的 B、舰载机需要预警机提供目标信息,预警机需要舰载机的保护,两者具有相关性 C、舰载机与航母是两个互不相关的系统 D、配备了相控阵雷达在内的各种新型电子设备,优化了防空以及末端反导防御系统 -
18、传统物流模式是产品供应商直接向各产品经销商供货(如图甲所示);现代物流模式是产品供应商通过配送中心向各产品经销商供货(如图乙所示)。以下关于物流流程的说法中不正确的是( )
 A、现代物流模式侧重于运输成本的优化 B、配送中心的建立为优化物流流程创造了条件 C、配送中心是现代物流流程中的一个环节 D、现代物流提高了产品的质量
A、现代物流模式侧重于运输成本的优化 B、配送中心的建立为优化物流流程创造了条件 C、配送中心是现代物流流程中的一个环节 D、现代物流提高了产品的质量 -
19、图所示为一机械夹紧装置,当杆1顺时针(从上往下看)转动夹紧物块时,下列受力分析正确的是( )
 A、杆2受扭转,杆3受压,杆4受拉,杆5受压 B、杆2受扭转,杆3受压,杆4受弯曲,杆5受拉 C、杆1受弯曲,杆3受拉,杆4受弯曲,杆5受压 D、杆1受拉,杆3受拉,杆4受拉,杆5受压
A、杆2受扭转,杆3受压,杆4受拉,杆5受压 B、杆2受扭转,杆3受压,杆4受弯曲,杆5受拉 C、杆1受弯曲,杆3受拉,杆4受弯曲,杆5受压 D、杆1受拉,杆3受拉,杆4受拉,杆5受压 -
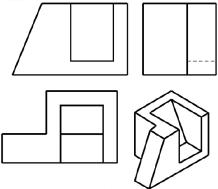
20、小明在通用技术实践课上,用一块加工如图所示的形体,他选择了下列工具,其中不合理的是( )
 A、
A、 B、
B、 C、
C、 D、
D、