相关试卷
-
1、为了给窗户安装一个可开关的安全栅栏,小明设计了以下四种方案,其中不能开关的是( )A、
 B、
B、 C、
C、 D、
D、
-
2、如图所示是为老人设计的椅子,造型上借鉴了明式“圈椅”的元素。内部采用两同心轴结构,使座面能随着身体的活动而运动。下列关于该椅子的分析与评价中不恰当的是( )
 A、有助于活动身体,实现了人机关系的健康目标 B、座面可转动,符合设计的技术规范原则 C、同心轴结构使座面可转动,说明功能的实现需要相应的结构来保证 D、借鉴了明式“圈椅”造型,体现了技术与文化的有机结合
A、有助于活动身体,实现了人机关系的健康目标 B、座面可转动,符合设计的技术规范原则 C、同心轴结构使座面可转动,说明功能的实现需要相应的结构来保证 D、借鉴了明式“圈椅”造型,体现了技术与文化的有机结合 -
3、2022年11月,我国神舟十五号载人飞船成功发射,该飞船采用了多项改进的技术。下列关于技术性质的理解中不恰当的是( )A、飞船发射要考虑多种因素,体现了技术的综合性 B、改进的技术使飞船更可靠,体现了技术的目的性 C、在解决舱门密封性检测耗时长问题的过程中,研发了快速检测技术,体现了技术的实践性 D、飞船处理器抗辐照加固技术的内容和体系复杂,体现了技术的复杂性
-
4、请补全三视图中所缺的3条图线(超过3条图线倒扣分)。

-
5、小明发现某小学校园门口的人脸识别监视器高度角度固定,低年级的小学生入校要踮起脚尖才能进行人脸识别,高年级的学生入校时要弯腰进行人脸识别,非常不便。且监视器长期风吹日晒,降低了使用寿命。因此小明打算设计一个装置,可以使监视器在不同年级的不同入校时段进行高度角度调整;在周末、暑假、夜间等监视器不使用的时间,监视器可以自动收纳到下方的柜体内,以延长其使用寿命。请你帮助小明设计该装置,具体要求如下:
A.监视器升降高度范围0~500mm(0mm时监视器顶端没入下方柜体);
B.监视器可调仰角范围-40°~+40°;
C.监视器能保持在所调节位置;
D.采用减速电机驱动(数量不限);
E.整个装置结构简单,具有一定的强度;
F.其余材料自选。
请完成以下任务:
(1)、设计装置时,需要考虑的是(在“A .学生的身高;B .人流量;C .监视器的功能”中选择合适的选项,将序号填入横线处);(2)、设备长期使用灵敏度下降,体现了系统的(在“A .整体性;B .相关性;C .动态性;D .目的性”中选择合适的选项,将序号填入横线处);(3)、设计过程中,不合理的做法是(在“A .尽量多选标准件;B .确定好标准件后绘制标准件的机械加工图;C .模型制作完成后,要进行技术试验”中选择合适的选项,将序号填入横线处);(4)、画出该装置机械部分的设计草图(电机可用方框表示,监视器可用简单线条表示,必要时可用文字说明);在设计草图上标注主要尺寸。
-
6、李明发现学校里一些老师由于长时间伏案办公导致肩颈不适。通过问卷法和访谈法对老师进行调查后,确定了以站立式办公桌为设计项目。请完成以下任务:(1)、李明提出了下列设计要求,其中不合理的是、(在下列选项中选出合适的2项,将序号填入横线)
A.能便捷地实现桌面的升高和下降,方便站立时和坐下时办公;
B.有台历、闹钟、音响等附加功能;
C.在升高状态下,稍加用力按压,即可使其下降;
D.结构简单、方便制作。
(2)、构思时,李明先将站立式办公桌结构分为桌面结构、支撑结构、高度调节结构三部分,分别收集了每一部分的两种实现方法(如图所示),再将这些方法进行重新组合,形成设计方案。李明采用的构思方法是( )(在下列选项中选出合适的选项,将序号填入括号) A、形态分析法 B、联想法 C、设问法 D、仿生法(3)、以下选取了李明在设计中的一部分工作步骤,请你按设计的一般过程进行排序( )
A、形态分析法 B、联想法 C、设问法 D、仿生法(3)、以下选取了李明在设计中的一部分工作步骤,请你按设计的一般过程进行排序( )①收集与站立式工作台相关的信息
②通过问卷对学校老师进行需求调查,确定研发方向
③进行设计分析,方案构思,在多种方案中选定最优方案,画出工作台的技术图样
④制作工作台模型并进行相关测试
(在下列选项中选出合适的选项,将序号填入括号里)
A、①②③④ B、②①④③ C、①②④③ D、②①③④(4)、设计过程中,不合理的做法是、(在下列选项中选出合适的2项,将序号填入横线)A.尽量选用标准件;
B.绘制各部分的机械加工图后,绘制整体设计草图;
C.应用计算机辅助设计软件,进行虚拟仿真试验,检验结构、尺寸等是否符合正常升降的要求;
D.为方便高度调节,各连接处均使用自攻螺钉连接。
-
7、如图为一种温度控制电路,当热敏电阻Rt检测到温度低于下限时,加热丝开始加热;当温度高于上限时,加热丝停止加热。已知二极管均为硅管,下列分析错误的是( )
 A、适当增加R1阻值,会调低温度的上限和下限 B、改变电阻R4,温度下限不变 C、二极管D1短路,电路依然有上下限温度控制功能 D、改变电阻R2,会改变温度上限
A、适当增加R1阻值,会调低温度的上限和下限 B、改变电阻R4,温度下限不变 C、二极管D1短路,电路依然有上下限温度控制功能 D、改变电阻R2,会改变温度上限 -
8、如图所示为小明设计的西瓜探熟器电路,已知熟瓜电阻小,生瓜电阻大。下列相关说法中不正确的是( )
 A、探针插入生瓜时,蜂鸣器响 B、探针插入熟瓜时,V1发光 C、增大Rp的阻值,辨别出的瓜更生一点 D、R1主要起到限流保护V1的作用
A、探针插入生瓜时,蜂鸣器响 B、探针插入熟瓜时,V1发光 C、增大Rp的阻值,辨别出的瓜更生一点 D、R1主要起到限流保护V1的作用 -
9、下列通用技术课程中的常用元器件,一般是作为电子控制系统输出部分的是( )A、
 B、
B、 C、
C、 D、
D、
-
10、如图所示是药粉干燥分离控制系统示意图。工作时,注料泵向干燥塔注入湿料,PLC根据检测装置检测到的出料口药粉干燥程度,控制鼓风机风量以及注料阀门的开合程度,使药粉的干燥程度符合设定范围。同时,与物料接触过夹带药粉的空气,经过旋风分离器,使药粉沉降重新回流进入干燥塔,废气再经水幕除尘器洗涤后排放。清根据示意图及其描述完成小题。
 (1)、关于该控制系统,下列说法中不恰当的是( )A、具有药粉干燥功能,体现了系统的目的性 B、鼓风机功率过小,导致药粉过湿,体现了系统的整体性 C、废气经过水幕除尘器洗涤后排放,体现了系统的环境适应性 D、系统运行一段时间后,旋风分离器性能降低,体现了系统的动态性(2)、下列关于药粉干燥控制子系统的说法中正确的是( )A、注料泵为执行器 B、该系统属于开环控制系统 C、注料阀门的开合程度为输入量 D、注入湿料的含水量属于该系统的干扰因素
(1)、关于该控制系统,下列说法中不恰当的是( )A、具有药粉干燥功能,体现了系统的目的性 B、鼓风机功率过小,导致药粉过湿,体现了系统的整体性 C、废气经过水幕除尘器洗涤后排放,体现了系统的环境适应性 D、系统运行一段时间后,旋风分离器性能降低,体现了系统的动态性(2)、下列关于药粉干燥控制子系统的说法中正确的是( )A、注料泵为执行器 B、该系统属于开环控制系统 C、注料阀门的开合程度为输入量 D、注入湿料的含水量属于该系统的干扰因素 -
11、下图为某化工生产过程的工艺流程。下列关于该流程分析中正确的是( )
 A、先进的过滤设备是该流程优化的条件 B、该流程的最终产物是CO2、CaCO3、NH4Cl、KNO3 C、反应Ⅰ、反应Ⅱ、反应Ⅳ是串行工序,而反应Ⅲ和它们是并行工序 D、为提高流程效率、节约成本,可以把过滤环节合并
A、先进的过滤设备是该流程优化的条件 B、该流程的最终产物是CO2、CaCO3、NH4Cl、KNO3 C、反应Ⅰ、反应Ⅱ、反应Ⅳ是串行工序,而反应Ⅲ和它们是并行工序 D、为提高流程效率、节约成本,可以把过滤环节合并 -
12、如图所示的制动演示机构,转轮转动过程中,在力F的作用下,机构处于制动状态,下列分析中正确的是( )
 A、拉杆受拉、连杆3受拉、连杆1受压、转轮受压 B、拉杆受弯曲、连杆3受拉、连杆1受压、转轮受压受扭转 C、拉杆受拉、连杆3受压、连杆1受拉、转轮受扭转 D、拉杆受弯曲、连杆3受压、连杆1受拉、转轮受压受扭转
A、拉杆受拉、连杆3受拉、连杆1受压、转轮受压 B、拉杆受弯曲、连杆3受拉、连杆1受压、转轮受压受扭转 C、拉杆受拉、连杆3受压、连杆1受拉、转轮受扭转 D、拉杆受弯曲、连杆3受压、连杆1受拉、转轮受压受扭转 -
13、通用技术课上,小明设计了如图所示的零件(厚度为3mm),并用40mm×80mm厚度为3mm的钢板制作该零件。请根据题图完成小题。
 (1)、图中漏标的尺寸共有( )A、1处 B、2处 C、3处 D、4处(2)、下列说法中合理的是( )A、工件加工流程可以为:划线→钻孔→锯割→锉削 B、加工圆弧b需要钻孔后再锯割 C、加工圆弧a只能用半圆锉 D、加工圆弧C需要用圆锉锉削后再用金刚砂纸打磨
(1)、图中漏标的尺寸共有( )A、1处 B、2处 C、3处 D、4处(2)、下列说法中合理的是( )A、工件加工流程可以为:划线→钻孔→锯割→锉削 B、加工圆弧b需要钻孔后再锯割 C、加工圆弧a只能用半圆锉 D、加工圆弧C需要用圆锉锉削后再用金刚砂纸打磨 -
14、下列四种传动结构,电机单向匀速转动时,都使从动件往复直线运动。其中,向左、向右均为匀速移动的是( )A、
 B、
B、 C、
C、 D、
D、
-
15、如图是一款贝壳午睡枕,支持趴睡、侧睡、抱睡三种睡姿。关于该午睡枕,下列说法中不正确的是( )
 A、慢回弹记忆棉做枕芯,柔软不塌陷,实现了舒适目标 B、底盘大小考虑了人机关系的静态尺寸 C、底部硅胶防滑垫设计,主要是从“环境”的因素考虑的 D、外形贝壳形状,是采用了“仿生法”的构思方法
A、慢回弹记忆棉做枕芯,柔软不塌陷,实现了舒适目标 B、底盘大小考虑了人机关系的静态尺寸 C、底部硅胶防滑垫设计,主要是从“环境”的因素考虑的 D、外形贝壳形状,是采用了“仿生法”的构思方法 -
16、我国企业独立研发了一款智能核酸采样亭,采样、设备消杀、储存采样管等一系列动作均由机器人自动完成,7×24小时、全年无休。如图所示是“采样手”在采集样本。下列说法中不正确的是( )
 A、经过了数千次采样测试和不断的技术优化,采样机器人最终实现产品的落地应用,体现了技术的实践性 B、高精度力传感器技术和自适应力控计算技术,是“轻柔采样手”设计的基础 C、采样亭配备控温装置、紫外线、消毒液等,确保采样样本保存温度适宜,且不被污染,体现了人机关系安全目标 D、人们研发智能采样亭,是为了满足安全、快捷采样的需求
A、经过了数千次采样测试和不断的技术优化,采样机器人最终实现产品的落地应用,体现了技术的实践性 B、高精度力传感器技术和自适应力控计算技术,是“轻柔采样手”设计的基础 C、采样亭配备控温装置、紫外线、消毒液等,确保采样样本保存温度适宜,且不被污染,体现了人机关系安全目标 D、人们研发智能采样亭,是为了满足安全、快捷采样的需求 -
17、小明在通用技术实践课上,制作了如图a所示的“木质简易桔槔模型”,进行如图b所示的技术试验时,2块竖直支撑板发生了损坏。已知杠杆上有3个Ф6(①②③)通孔;支撑板连接孔圆心到底板的距离为300mm;木质支撑板与木质底板采用钉连接固定。请利用厚度为2mm的钢板,帮助小明设计支撑板,实现要求的功能。设计要求如下:
①能够实现原支撑板功能,且稳定、牢固连接在底板上;
②杠杆支撑高度可实现260mm、300mm两档调节,且高度调节方便;
③结构简单,连接方便。

请根据描述和设计要求完成以下任务:
(1)、小明解决该问题的限制因素不可能是(在“A .加工技能;B .底板的形状;C .支撑板功能;D .材料为钢板”中选择合适的选项,将序号填入横线处);(2)、画出支撑板的设计草图,必要时可用文字说明;(3)、在设计草图上标注主要尺寸;(4)、支撑板与底板的连接,最适合选用的标准件是( );A、自攻螺丝 B、紧定螺钉
B、紧定螺钉 C、销钉、开口插销
C、销钉、开口插销 D、塑料膨胀螺丝
D、塑料膨胀螺丝 (5)、小明在构思方案前不应该进行的环节是(在“A .制定设计要求;B .收集信息;C .绘制三视图及其尺寸标注;D .明确问题价值”中选择合适的选项,将序号填入横线处)。
(5)、小明在构思方案前不应该进行的环节是(在“A .制定设计要求;B .收集信息;C .绘制三视图及其尺寸标注;D .明确问题价值”中选择合适的选项,将序号填入横线处)。 -
18、请补全三视图中所缺的3条图线(超过3条图线倒扣分)。

-
19、如图1所示是小明卧室床头的壁挂式台灯,他发现台灯与墙面连接的塑料底座损坏,连接不牢固。于是,他利用3mm厚的钢板,按照制定的设计要求设计了一个连接件(如图2所示),把台灯固定在墙上。已知墙上有4个连接孔,灯头位于墙面正前方(如图1所示方向)。请回答下列问题。
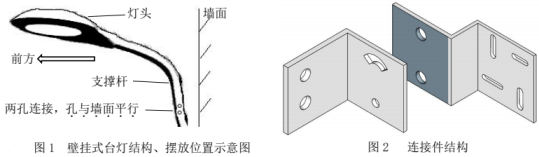 (1)、小明发现塑料底座损坏,连接不牢固,发现该问题的途径是(在“A .观察日常生活;B .收集和分析信息;C .技术研究与技术试验”中选择合适的选项,将序号填入横线处);(2)、小明依据设计要求设计了图2所示连接件,则下列设计要求不合理的是、(在“A .连接件与墙面、支撑杆连接稳固;B .台灯可以前后调节角度;C .方便连接固定在墙面;D .台灯角度不连续调节”中选择2个选项,将序号填入横线处);(3)、连接件结构采用四个腰型孔与墙面孔连接,主要实现了人机关系目标(在“A .高效;B .舒适;C .健康;D .安全”中选择合适的选项,将序号填入横线处);(4)、为了检验连接件是否达到设计要求,小明进行了如下试验,下列试验不合理的是、(在下列选项中选择2个选项,将序号填写在横线上)。
(1)、小明发现塑料底座损坏,连接不牢固,发现该问题的途径是(在“A .观察日常生活;B .收集和分析信息;C .技术研究与技术试验”中选择合适的选项,将序号填入横线处);(2)、小明依据设计要求设计了图2所示连接件,则下列设计要求不合理的是、(在“A .连接件与墙面、支撑杆连接稳固;B .台灯可以前后调节角度;C .方便连接固定在墙面;D .台灯角度不连续调节”中选择2个选项,将序号填入横线处);(3)、连接件结构采用四个腰型孔与墙面孔连接,主要实现了人机关系目标(在“A .高效;B .舒适;C .健康;D .安全”中选择合适的选项,将序号填入横线处);(4)、为了检验连接件是否达到设计要求,小明进行了如下试验,下列试验不合理的是、(在下列选项中选择2个选项,将序号填写在横线上)。A.检测台灯角度调节是否方便;
B.调节台灯照射角度,观察台灯照射范围,检测旋转角度是否合理;
C.把台灯固定在适当角度,用手推拉支撑杆,观察支撑杆是否弯曲;
D.把灯头旋转至最高位置固定,在灯头上悬挂重物,检测连接件的承载能力。
-
20、如图所示是小明同学采用五夹板为材料制作便携式小凳(凳脚可以装入中空凳面内)的加工步骤,下列关于小凳设计、加工过程的描述不正确的是( )
 A、⑤采用“肩”形结构连接,体现了设计促进了连接技术的利用和革新 B、①挖去左右各一弧形板,考虑了艺术设计因素 C、①挖去下方一弧形板,主要考虑了“环境”因素 D、该加工过程可以是②④①⑤③
A、⑤采用“肩”形结构连接,体现了设计促进了连接技术的利用和革新 B、①挖去左右各一弧形板,考虑了艺术设计因素 C、①挖去下方一弧形板,主要考虑了“环境”因素 D、该加工过程可以是②④①⑤③