相关试卷
-
1、如图所示为一简单形体的尺寸标注图。请问图中的错标尺寸共有( )
 A、2处 B、3处 C、4处 D、5处
A、2处 B、3处 C、4处 D、5处 -
2、下列三视图对应的俯视图正确的是( )
 A、
A、 B、
B、 C、
C、 D、
D、
-
3、如图所示为一台锻造机构,电机驱使曲柄转动,经由虚线框内的传动构件,令锤头完成上下往复敲打。下列虚线框内的构件设计中,合理的是( )
 A、
A、 B、
B、 C、
C、 D、
D、
-
4、如图所示为某助力外骨骼装置,下列分析与评价中恰当的是( )
 A、该设计可显著提高工人搬运货物的效率,符合设计的经济原则 B、设计中采用了大量的标准件,符合设计的技术规范原则 C、关节部分可伸缩可固定设计,主要是从“环境”的角度考虑 D、采用液压驱动,主要是从“物”的角度考虑
A、该设计可显著提高工人搬运货物的效率,符合设计的经济原则 B、设计中采用了大量的标准件,符合设计的技术规范原则 C、关节部分可伸缩可固定设计,主要是从“环境”的角度考虑 D、采用液压驱动,主要是从“物”的角度考虑 -
5、如图所示为某款3D巨幕眼镜,整机轻至76g。下列分析恰当的是( )
 A、整机重量轻,体现人机关系的高效目标 B、镜框有多种颜色可选,考虑了心理需求 C、镜片角度三档可调,主要考虑了特殊人群 D、两镜腿之间的间距主要考虑了动态的人
A、整机重量轻,体现人机关系的高效目标 B、镜框有多种颜色可选,考虑了心理需求 C、镜片角度三档可调,主要考虑了特殊人群 D、两镜腿之间的间距主要考虑了动态的人 -
6、北宋苏颂、韩公廉发明水运仪象台,为漏刻水力驱动,集天文观测、演示和报时等功能于一体,为古代天文仪器制造高峰,被誉为最早天文钟。下列说法正确的是( )
 A、计时工具的发明和发展是由人类的需求所推动的 B、水运仪象台集天文观测、天文演示和报时功能为一体,体现了技术的综合性 C、水运仪象台是世界上最早的天文钟,体现了技术的专利性 D、苏颂、韩公廉等人发明制造水运仪象台,属于科学活动
A、计时工具的发明和发展是由人类的需求所推动的 B、水运仪象台集天文观测、天文演示和报时功能为一体,体现了技术的综合性 C、水运仪象台是世界上最早的天文钟,体现了技术的专利性 D、苏颂、韩公廉等人发明制造水运仪象台,属于科学活动 -
7、小明计划为家中的小猫亲手制作一个新猫窝,于是构思出了如图a所示的设计方案。请根据题图描述,完成以下任务:
 (1)、猫窝前板设计需开一个半径60mm的半圆孔,圆心距左边缘150mm、底边缘250mm,请在图b中标注该半圆半径60mm及250mm尺寸。(2)、小明用大小足够、表面粗糙的实木板加工侧板时,合理的流程为:下料→→画线→锯割→凿削→→打磨(A.刨削;B.钻孔;C.锉削;D.凿削);(3)、加工侧板上的方孔部位时,下列工具可能需要用到的是______;A、丝锥
(1)、猫窝前板设计需开一个半径60mm的半圆孔,圆心距左边缘150mm、底边缘250mm,请在图b中标注该半圆半径60mm及250mm尺寸。(2)、小明用大小足够、表面粗糙的实木板加工侧板时,合理的流程为:下料→→画线→锯割→凿削→→打磨(A.刨削;B.钻孔;C.锉削;D.凿削);(3)、加工侧板上的方孔部位时,下列工具可能需要用到的是______;A、丝锥 B、木工刨
B、木工刨 C、木工凿
C、木工凿 D、钢锯
D、钢锯 (4)、小明计划用两块木板通过燕尾榫拼接成窝顶结构,如图c所示。下列木板2的榫头设计方案中正确的是______;
(4)、小明计划用两块木板通过燕尾榫拼接成窝顶结构,如图c所示。下列木板2的榫头设计方案中正确的是______;
图c
A、 B、
B、 C、
C、 D、
D、
-
8、小明在制作并完成了如图a所示交通信号灯模型的初步调试后,发现模型由于高度过低,导致其展示效果不够理想。针对这一问题,他决定为交通信号灯模型设计并制作一个可以调节高度的支架,以优化展示效果。模型的底座尺寸如图b所示。设计要求如下:

(a)支架与底座原三个Φ4连接孔可靠连接;
(b)支架能平稳地放置于水平面上;
(c)能使模型在300-500mm高度范围内实现连续可调;
(d)模型能稳定保持在所调节的高度位置;
(e)材料自选。
请完成以下任务:
(1)、小明发现“模型高度过低”这个问题的途径是______A、观察日常生活 B、收集和分析信息 C、技术研究与技术试验(2)、请你根据小明确定的设计要求设计一个支架,画出设计草图(必要时可用文字补充说明);(3)、在你的设计草图上标注主要尺寸。 -
9、随着学校“环保”主题科技节的临近,小明决定利用废旧材料制作一个交通信号灯模型。于是,他构思出了如图a所示的设计方案。请完成以下任务:

图a
(1)、小明计划选用透明材料制作灯罩部分,以清晰展现内部的电子控制结构,并打算使用自攻螺钉将垫板连接到底座上。请根据小明的需求将构件同材料进行匹配连线。 (2)、小明利用上述材料制作模型时,可以不考虑的因素有______;A、小明使用现有工具加工灯罩的能力 B、钢板的加工工艺 C、学校门口红绿灯支架的高度 D、垫板与底座的连接方式(3)、小明筛选完设计方案后,下列环节不需要进行的是______;A、绘制草图进行设计分析 B、绘制底座加工图 C、选择合适材料制作灯罩 D、对模型进行测试评估后再优化(4)、小明基于设计的一般原则运用雷达图对设计方案进行了评价,如图b所示,以下优化方案不合理的是_____;
(2)、小明利用上述材料制作模型时,可以不考虑的因素有______;A、小明使用现有工具加工灯罩的能力 B、钢板的加工工艺 C、学校门口红绿灯支架的高度 D、垫板与底座的连接方式(3)、小明筛选完设计方案后,下列环节不需要进行的是______;A、绘制草图进行设计分析 B、绘制底座加工图 C、选择合适材料制作灯罩 D、对模型进行测试评估后再优化(4)、小明基于设计的一般原则运用雷达图对设计方案进行了评价,如图b所示,以下优化方案不合理的是_____;
图b
A、对模型表面进行精细打磨,提升美观度 B、选用新型材料制作,增加制作成本 C、增加太阳能板实现能源自给自足 D、增加智能交通系统,可实时调整信号灯时间,提升创新性 -
10、小明参加山区志愿服务时,发现当地初中生夜间学习没有合适的台灯,因此,他萌生了为山区初中生设计一款护眼台灯的想法。请完成下面小题。(1)、小明对部分山区初中生做了关于台灯支撑架材料需求的问卷调查,并对调查数据做了统计分析,如图所示。小明打算选择金属与塑料结合的方案来设计支撑架。下列有关支撑架的设计分析不恰当的是( )
 A、寻找可降解的塑料材料,主要考虑了“环境”的因素 B、寻找耐腐蚀的金属材料,主要考虑了“人”的因素 C、构思金属与塑料稳固结合的方案,主要考虑了“物”的因素 D、设计符合人机工程学的支撑架,主要考虑了“人”的因素(2)、小明在设计过程中使用了如下几种技术语言,其中不属于技术图样的是( )A、台灯开关的调查统计结果
A、寻找可降解的塑料材料,主要考虑了“环境”的因素 B、寻找耐腐蚀的金属材料,主要考虑了“人”的因素 C、构思金属与塑料稳固结合的方案,主要考虑了“物”的因素 D、设计符合人机工程学的支撑架,主要考虑了“人”的因素(2)、小明在设计过程中使用了如下几种技术语言,其中不属于技术图样的是( )A、台灯开关的调查统计结果 B、台灯的设计草图
B、台灯的设计草图 C、台灯的装配图
C、台灯的装配图 D、台灯的三视图
D、台灯的三视图 (3)、小明经过方案构思、交流、筛选和细化,最终确定了如图a所示台灯设计方案。他计划用实木板来制作底座,用带有内螺纹的金属管制作支撑杆(如图b)。下列连接件适合用于连接底座与支撑杆的是( )
(3)、小明经过方案构思、交流、筛选和细化,最终确定了如图a所示台灯设计方案。他计划用实木板来制作底座,用带有内螺纹的金属管制作支撑杆(如图b)。下列连接件适合用于连接底座与支撑杆的是( )

图a 图b
A、 B、
B、 C、
C、 D、
D、
-
11、小明在学习“设计图样的绘制”相关内容后,为自己设计的连接件绘制了如下图样,他准备用100mm×100mm×5mm的钢板在通用技术活动室加工该连接件。请完成下面小题。
 (1)、加工该连接件时,下列操作中不正确的是( )A、用划规划出Φ80圆弧的线痕时,划规的脚尖应对准圆心不发生滑移 B、锯割外轮廓时,推锯加压,回拉不加压,锯程不小于锯条长度的2/3为宜 C、钻Φ12圆孔时,可用平口钳夹持工件,同时要戴防护眼镜和手套 D、锉削U型槽后,不能用手清除锉刀上的切屑,应使用钢丝刷来清除(2)、在加工该连接件的过程中,下列工具需要用到且搭配合理的是( )A、划针和钢直尺
(1)、加工该连接件时,下列操作中不正确的是( )A、用划规划出Φ80圆弧的线痕时,划规的脚尖应对准圆心不发生滑移 B、锯割外轮廓时,推锯加压,回拉不加压,锯程不小于锯条长度的2/3为宜 C、钻Φ12圆孔时,可用平口钳夹持工件,同时要戴防护眼镜和手套 D、锉削U型槽后,不能用手清除锉刀上的切屑,应使用钢丝刷来清除(2)、在加工该连接件的过程中,下列工具需要用到且搭配合理的是( )A、划针和钢直尺 B、钢丝锯和台虎钳
B、钢丝锯和台虎钳 C、锉刀和平口钳
C、锉刀和平口钳 D、麻花钻和圆板牙
D、麻花钻和圆板牙
-
12、如图所示为小明绘制的某形体的三视图,相对应的正等轴测图是( )

 A、
A、 B、
B、 C、
C、 D、
D、
-
13、下列设计中,不是主要从人的角度考虑的是( )A、安全带提示灯
 B、公交车无障碍过渡板
B、公交车无障碍过渡板 C、笔记本支架散热器
C、笔记本支架散热器 D、办公室过道宽度
D、办公室过道宽度
-
14、如图所示手表扣,由扣母和扣头两部分构成。扣头推入扣母后能轻松扣紧,按压凸起部分才能解锁打开,为实现上述功能,扣头虚线框处凸起部分的结构设计方案中,合理的是( )
 A、
A、 B、
B、 C、
C、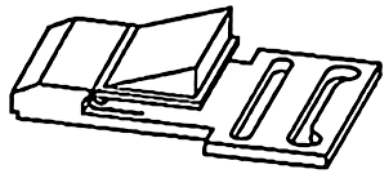 D、
D、
-
15、如图所示为柔性单晶硅太阳电池,下列有关该电池的分析与评价中不合理的是( )
 A、突破了传统电池占用空间大的问题,符合设计的创新原则 B、电池轻薄且可弯折,方便随身携带,符合设计的实用原则 C、可有效转化太阳能,符合设计的可持续性发展原则 D、也可安装在曲面的屋顶上,符合设计的技术规范原则
A、突破了传统电池占用空间大的问题,符合设计的创新原则 B、电池轻薄且可弯折,方便随身携带,符合设计的实用原则 C、可有效转化太阳能,符合设计的可持续性发展原则 D、也可安装在曲面的屋顶上,符合设计的技术规范原则 -
16、如图所示为一款双框架滑轮背包,松紧带与滑轮使人在移动时,背包稳定而不上下摇晃,有效降低人在负重移动时承受的压力,体现了技术( )
 A、具有发展人的价值 B、具有保护人和解放人的价值 C、促进社会生产的发展 D、对自然的保护作用
A、具有发展人的价值 B、具有保护人和解放人的价值 C、促进社会生产的发展 D、对自然的保护作用 -
17、2024年10月我国神舟十九号成功发射,三名航天员顺利入驻“天宫”空间站,并在空间站内进行了多项技术研究和试验,请根据题图完成下面小题。
 (1)、下列关于技术性质的理解中不恰当的是( )A、能开展物理、生物等领域的科学实验,体现了技术的目的性 B、在多次试验中,完善了气闸舱段技术,体现了技术的实践性 C、实验舱多层结构制造技术的内容和体系复杂,体现了技术的复杂性 D、首次将果蝇送入太空做基因研究,体现了技术的专利性(2)、如图b所示,神舟十九号首次将果蝇带上太空,研究亚磁环境下果蝇的生长发育等行为,为人类在太空的适应性研究奠定基础。随着技术的成熟,还可将小鼠带上空间站进行神经、骨骼等方面研究。下列说法不合理的是( )A、研发用于果蝇研究的太空实验装置属于技术活动 B、设计实验装置采用了亚磁模拟技术,体现了设计是技术的基础 C、果蝇试验的结果可为未来空间站小鼠试验起到有力的数据支撑 D、由于果蝇基因与人类相似,且体积小繁殖快,宜用于人类的太空适应性移植试验
(1)、下列关于技术性质的理解中不恰当的是( )A、能开展物理、生物等领域的科学实验,体现了技术的目的性 B、在多次试验中,完善了气闸舱段技术,体现了技术的实践性 C、实验舱多层结构制造技术的内容和体系复杂,体现了技术的复杂性 D、首次将果蝇送入太空做基因研究,体现了技术的专利性(2)、如图b所示,神舟十九号首次将果蝇带上太空,研究亚磁环境下果蝇的生长发育等行为,为人类在太空的适应性研究奠定基础。随着技术的成熟,还可将小鼠带上空间站进行神经、骨骼等方面研究。下列说法不合理的是( )A、研发用于果蝇研究的太空实验装置属于技术活动 B、设计实验装置采用了亚磁模拟技术,体现了设计是技术的基础 C、果蝇试验的结果可为未来空间站小鼠试验起到有力的数据支撑 D、由于果蝇基因与人类相似,且体积小繁殖快,宜用于人类的太空适应性移植试验 -
18、如图a所示是小明家的酒柜,使用中发现放置在柜面上的红酒杯经常被碰倒,导致杯子破裂。请你帮助小明设计一款可夹持红酒杯的酒杯架,能固定在酒柜柜板的边缘,同时还能调节高度来满足不同身高人的需求。柜板的厚度为4cm,红酒杯的相关尺寸如图b所示,设计要求如下:

(a)可以稳固夹持在柜板的边缘,不能对柜板进行加工;
(b)高度能连续可调,调节范围在100mm~200mm之间;
(c)结构稳固,且红酒杯取放方便;
(d)主要材料采用5mm厚的钢板,辅助材料自选。
(1)、在头脑中构思符合设计要求的多个方案,画出其中最优方案的设计草图;(2)、在设计草图上标注主要尺寸;(3)、小明准备在装置安装后进行以下技术试验,其中不合理的是_________(多选)。A、观察高度和角度能否连续调节; B、将红酒杯放置到酒杯架上,观察取放是否方便; C、安装好后,观察酒杯架与柜板连接是否稳固; D、安装好后,用锤头敲击酒杯架,观察连接部分的承载能力。 -
19、如图a所示是小明设计的一款可折叠台灯,主要由灯罩、支撑杆、底座、灯源等部分组成,通过上网收集资料,小明完成了台灯大部分部件的选材,如表b所示。请根据图表及其描述,完成以下任务:

 (1)、小明同学在设计分析的过程中,提出了以下设计要求,其中与人机关系要实现的目标相关的有 ;A、台灯底座防滑设计 B、台灯的亮度可调节设计 C、台灯支撑杆与连接块铰连接设计 D、成本尽可能低 E、灯罩表面复古纹路设计(2)、小明根据所选的材料完成了台灯模型的制作,该模型可用于分析人机关系及性能,该模型属于 ;A、功能模型 B、概念模型 C、结构模型 D、草模(3)、灯罩部分选择的材料合适的是 ;A、松木板 B、瓦楞纸 C、铝板 D、塑料(4)、小明在对台灯模型测试过程中发现支撑杆与连接块部分容易松动,于是重新设计连接块,实现台灯能折叠收纳、能展开固定的功能,连接孔处均采用松铆连接,下列连接块的设计方案合理的是 。A、
(1)、小明同学在设计分析的过程中,提出了以下设计要求,其中与人机关系要实现的目标相关的有 ;A、台灯底座防滑设计 B、台灯的亮度可调节设计 C、台灯支撑杆与连接块铰连接设计 D、成本尽可能低 E、灯罩表面复古纹路设计(2)、小明根据所选的材料完成了台灯模型的制作,该模型可用于分析人机关系及性能,该模型属于 ;A、功能模型 B、概念模型 C、结构模型 D、草模(3)、灯罩部分选择的材料合适的是 ;A、松木板 B、瓦楞纸 C、铝板 D、塑料(4)、小明在对台灯模型测试过程中发现支撑杆与连接块部分容易松动,于是重新设计连接块,实现台灯能折叠收纳、能展开固定的功能,连接孔处均采用松铆连接,下列连接块的设计方案合理的是 。A、 B、
B、 C、
C、
-
20、久坐对颈椎,腰椎带来伤害,会导致脑部供血不足,反应迟缓,因此小明设计了如图所示可升降书桌,满足实际使用中不同姿势的需求。请完成以下任务:

(1)小明设计时提出以下的设计要求,其中不是从“环境”角度考虑的是;
A.T型结构设计,受力均衡,稳固不晃动 B.垂直升降,安全稳固,经久耐用
C.圆角设计,减少磕碰 D.运行不嘈杂,刹轮不易打滑
(2)万向轮既要能够实现移动方便,同时还需要固定方便。因此,底座上的万向轮安装有两种类型:一种是普通式的,一种是带刹式的。其中合理的安装方式是;

A.A、D装普通轮,B、C装刹轮 B.A、C装普通轮,B、D装刹轮
C.A、B装刹轮,C、D装普通轮 D.A、D装刹轮,B、C装普通轮
(3)各部分连接需要有一个合理的连接件。其中控制阀与桌面板之间的连接件、控制阀与升降立柱的连接件及底座与升降立柱之间的连接件可以分别采用;

①
 ②
② ③
③
A.①②③ B.②③① C.①③② D.②①③
(4)锯下合适大小的桌面板后,需要对如图桌面板进行“倒角”,一般需要用的工具有。

A.刨子 B.框锯 C.钢丝锯 D.凿子 E.砂纸 F.木工锉