相关试卷
-
1、某公司生产了一款用于体育场露天看台的塑料椅子,想通过较短时间的实验了解该款椅子的使用寿命。下列实验方法较合理的是( )A、采用模拟实验法模拟太阳光穿过窗玻璃照射进行光照老化试验 B、采用虚拟实验法模拟产品在潮湿、超高温的环境中进行耐腐蚀试验 C、采用强化试验法模拟远高于实际光照强度的太阳光直接照射进行光照老化试验 D、采用强化试验法进行自由跌落试验
-
2、如图所示是某款医院住院部使用的双摇多功能护理床,现需要在床沿两侧增加护栏扶手(如下图所示,为扶手需要进行连接的结构:两个等长的定位销,尺寸如图),设计要求如下:
A.护栏扶手可翻转,安装在床沿的两侧,始终与床沿相连;
B.护栏扶手不用时可放下,撑起固定时又具有足够的扶持强度;
C.操作方便,人机关系良好;


请根据上述设计要求, 完成以下任务:
(1)、画出护栏扶手与床沿进行安装所需连接件的设计草图(与床沿部分的连接结构只需画出一侧即可),可用文字简要说明护栏扶手是如何实现翻转并固定的;(2)、在草图上标注连接结构的主要尺寸;(3)、该护栏扶手的手握部分的材料宜采用 (从“①不锈钢管;②ABS工程塑料”中选择一项,将序号填横线处);(4)、该护栏扶手制作完成后,要进行各项性能测试,其中没必要进行测试的是(从“①护栏扶手撑起后抗压性能的测试; ②护栏扶手材料的抗老化性能测试;③护栏扶手折叠性能的测试”中选择一项,将序号填横线处) 。 -
3、如图a所示是某个夹具中的一个压板。小明在通用技术实践课上用钢板加工成这个压板,在加工过程中需要以下环节:A .钻孔;B .划线;C .锉削;D .冲眼;E .锯割。

请分析该压板的加工环节,回答以下问题:
(1)、合理的加工流程为:→D→→E(在横线处填写加工环节的序号);(2)、小明加工该压板时,下列工具不需要用到的是(在“A .样冲;B .台虎钳;C .钢丝锯”中选择合适的选项,将序号填入横线处)(3)、图b为该压板的三视图,请补全三视图中所缺的二条图线
-
4、小明尝试设计一款可折叠餐桌,从结构强度和稳定性的两个角度分析,下列设计方案中最合理的是( )A、
 B、
B、 C、
C、 D、
D、
-
5、如图所示是一款便携式折叠椅,下列对折叠椅的设计分析和评价中,不正确的是( )
 A、既可作坐垫又可作倚子,符合设计的实用原则 B、支架间采用松铆连接,主要是从“物”的角度考虑的 C、为了便于携带及保证强度,要选择质量轻、强度高的材料 D、折叠或打开需要双手操作,既考虑普通人群又考虑了特殊人群
A、既可作坐垫又可作倚子,符合设计的实用原则 B、支架间采用松铆连接,主要是从“物”的角度考虑的 C、为了便于携带及保证强度,要选择质量轻、强度高的材料 D、折叠或打开需要双手操作,既考虑普通人群又考虑了特殊人群 -
6、脚踩式垃圾桶是比较常见的日用品,如图甲所示,在踩下踏板后,桶盖被顶起,放开踏板后,桶盖自动闭合。请完成以下各小题。

 (1)、分析其工作原理,在图乙中将垃圾桶内部的机械结构原理示意图补充完善(画实线),必要时用文字说明;(2)、小黄同学想对该脚踩式垃圾桶进行技术试验,以下不需要的是(在“①反复踩踏板,检测操作灵活性;②内桶盛满水,检测内桶密封性;③用重物压桶盖,检测桶盖牢固性”中选择一项,将序号填写在横线处)。(3)、以下关于脚踩式垃圾桶的材料选择方案,不合理的是 。A、塑料外壳、木质内桶 B、木质外壳、塑料内桶 C、塑料外壳、塑料内桶 D、木质外壳、不锈钢内桶
(1)、分析其工作原理,在图乙中将垃圾桶内部的机械结构原理示意图补充完善(画实线),必要时用文字说明;(2)、小黄同学想对该脚踩式垃圾桶进行技术试验,以下不需要的是(在“①反复踩踏板,检测操作灵活性;②内桶盛满水,检测内桶密封性;③用重物压桶盖,检测桶盖牢固性”中选择一项,将序号填写在横线处)。(3)、以下关于脚踩式垃圾桶的材料选择方案,不合理的是 。A、塑料外壳、木质内桶 B、木质外壳、塑料内桶 C、塑料外壳、塑料内桶 D、木质外壳、不锈钢内桶 -
7、根据主视图补齐左视图、俯视图。

-
8、根据轴测图,请补全三视图中主视图、俯视图、左视图各1条线。

-
9、高二学生学习通用技术课之后,想要设计一盏台灯,在明确要解决问题后就收集相关信息,然后又从人、物、环境三个角度对所设计的产品——台灯进行分析,接下去他们应该做的是( )A、方案构思 B、方案呈现 C、方案筛选 D、技术试验
-
10、时下流行的智能手机都配有触摸屏,从人机关系角度看,其目的是 ( )A、满足使用者生理需要 B、考虑特殊人群的需要 C、提高操作效率 D、使操作者更安全
-
11、1912年,在电灯发明50周年的时候,包括美国总统在内的500多名社会名流在华盛顿隆重举行庆祝活动。爱迪生在经久不息的掌声中出场,他激动地说:“倘若我的工作给这个社会哪怕带来一丝的幸福,那我也就因此而得到满足……”这主要说明 ( )。A、爱迪生对自己的发明很满意 B、技术活动能够实现人的自我价值 C、技术具有两面性 D、技术能够保护人
-
12、补画三视图中缺少的三根线

-
13、如图所示是小明设计的鱼缸水位控制系统,可以自动控制鱼缸中的水位保持在一定范围之内。当水位低于下限时,抽水机抽水;当水位达到上限时,抽水机停止工作。请你根据描述和电路图完成以下任务:

CB7555电路输入输出逻辑关系表
输入
输出
2脚
6脚
3脚
<1/3Vcc
<2/3Vcc
高电平
>1/3Vcc
<2/3Vcc
保持
>1/3Vcc
>2/3Vcc
低电平
(1)、该水位控制系统的正常运行过程中,最低水位为(A .a 点;B .b 点;C .c 点);(2)、小明在使用过程中发现了一个问题,因水箱过大水泵抽水时,水位上升不明显,从而无法判断水泵的工作状态,请你帮他在虚线框中选择合适的端点,利用一个发光二极管和一个电阻,设计一个水泵工作状态指示灯,要求水泵工作时灯亮;水泵停止工作时灯灭。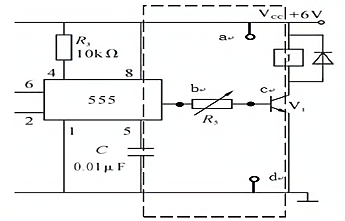 (3)、使用一段时间后发现,抽水泵始终不工作,产生该故障现象不可能的原因是(A .二极管V2反接;B .继电器触点虚焊;C .三极管 V1 击穿;D .R5 阻值过大);(4)、小明在解决了上述问题后,担心冬天天气寒冷鱼缸温度过低,采用同为负系数的热敏电阻Rt1、Rt2重新设计了如下图所示温控电路,其中Rt1是控制下限的热敏电阻;Rt2是控制上限的你电阻, 该电路能将鱼缸温度保持在一定范围之内,在低于下限温度时,加热器开始加热;高于上限温度时, 停止加热。小明在设计该电路时遇到了困难,请你帮他完成电路的连接。
(3)、使用一段时间后发现,抽水泵始终不工作,产生该故障现象不可能的原因是(A .二极管V2反接;B .继电器触点虚焊;C .三极管 V1 击穿;D .R5 阻值过大);(4)、小明在解决了上述问题后,担心冬天天气寒冷鱼缸温度过低,采用同为负系数的热敏电阻Rt1、Rt2重新设计了如下图所示温控电路,其中Rt1是控制下限的热敏电阻;Rt2是控制上限的你电阻, 该电路能将鱼缸温度保持在一定范围之内,在低于下限温度时,加热器开始加热;高于上限温度时, 停止加热。小明在设计该电路时遇到了困难,请你帮他完成电路的连接。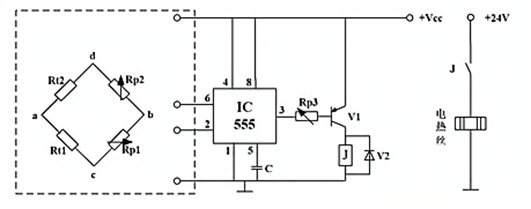 (5)、小明使用中发现该温控电路设定的下限温度过低,为保证电路正常工作该如何调整 (A .调大Rp1;B .调小Rp1;C .调大Rp2;D .调小Rp2;E .增大Rp3)。
(5)、小明使用中发现该温控电路设定的下限温度过低,为保证电路正常工作该如何调整 (A .调大Rp1;B .调小Rp1;C .调大Rp2;D .调小Rp2;E .增大Rp3)。 -
14、如图所示是一款运货的推车,小明在使用时发现,货车的货厢高度远高于推车高度,从推车上搬运货物非常不方便,于是想在推车上加装一个电动可升降的平台,电机已固定在小推车合适位置,请你帮助小明设计该连接件,要求如下:

① 平台能通过电机控制至少升降50cm
② 平台可以保持在所调节高度
③ 平台能通过电机控制升降
④ 平台及推车上不得另外钻孔
⑤ 材料自选
请完成以下任务:
(1)、小明学发现问题的途径是(A .收集和分析信息;B .观察日常生活;C .技术研究与技术试验);(2)、设计该装网置时,下列因素中可以不考虑的是(A .加装平台的材料;B .连接方式;C .货车的货厢高度);(3)、①画出设计草图;必要时可用文字说明(如果采用电机驱动方式,电机可用方块表示;如果装置为对称结构,只需画出一侧);②在设计草图上标注主要尺寸;
(4)、小明在装置安装完成后进行以下试验,以下试验不需要进行的是 。A、测试电机工作时,平台能否正常升降; B、对加装的平台进行承重测试,观察平台会不会发生弯曲变形 C、将平台升到一定高度,并在平台上放置 20 斤的重物,观察平台能否保持在所调的高度 -
15、小明学校的电动投影屏幕(如图1所示)与天花板的连接件已损坏,决定重新设计和制作该连接件。请完成以下任务:
 (1)、小明首先进行了设计分析,提出了下列要求,其中不合理的是、;
(1)、小明首先进行了设计分析,提出了下列要求,其中不合理的是、;A.有足够的强度
B.防止锈蚀
C.连接件的方孔尺寸要与电机转轴结构相适应
D.匹配投影屏幕的长度
E.能与电机同步转动
(2)、小明重新设计了如图2所示的连接件,其中腰型孔的设计主要符合设计的(A .技术规范原则;B .实用原则;C .美观原则;D .经济原则); (3)、制作该连接件时,合理的加工流程为:A→锯割→→→弯折→(A .划线;B .锉削;C .钻孔; D .淬火)。
(3)、制作该连接件时,合理的加工流程为:A→锯割→→→弯折→(A .划线;B .锉削;C .钻孔; D .淬火)。 -
16、如图所示为小明搭建的硅三极管实验电路,已知三极管处于放大状态中,下列说法不正确的是( )
 A、M点的电位大于N点的电位 B、在放大状态,Q点电位大约比4.3V低 C、把R2的阻值减小一半,集电极电流不变 D、把R1的阻值减小一半,N 点的电位几乎不变
A、M点的电位大于N点的电位 B、在放大状态,Q点电位大约比4.3V低 C、把R2的阻值减小一半,集电极电流不变 D、把R1的阻值减小一半,N 点的电位几乎不变 -
17、用指针万用表检测性能良好的三极管的种类、好坏和极性,下列说法不正确的是( )A、测量时档位选择×100或×1kΩ档 B、用表笔分别正反测量三个管脚,其中两个管脚正反向电阻均较大,则剩下的那个管脚为基极 C、电阻档档位变换后,均需要进行欧姆调零 D、黑表笔接基极b,红表笔分别接另外两个电极,若测得的电阻均很小,则为PNP型三极管
-
18、以下元器件中,在芯片电源的引脚不考虑的情况下,使用时需要考虑电源正负极的元器件有几个( )
 A、2 个 B、3 个 C、4 个 D、5 个
A、2 个 B、3 个 C、4 个 D、5 个 -
19、车载空调的制冷控制系统主要由冷凝器、膨胀阀、微处理器、鼓风机、蒸发器、压缩机、制冷剂储液干、燥器等组成,压缩机和膨胀阀协同工作使制冷剂循环制冷,鼓风机将车厢外的热空气吹经蒸发器使空气温度降低并送入车厢内。制冷时,温度传感器采集车厢内实际温度,微处理器根据设定温度与实测温度对压缩机、膨胀阀和鼓风机作出相应控制,使车厢内温度稳定在设定温度附近。
若以车厢内的空气作为被控对象,下列关于该制冷控制系统的说法中正确的是( )
A、控制方式为开环控制 B、控制量为微处理器输出信号 C、输入量是鼓风机从车厢外鼓入的热空气 D、检测装置是温度传感器 -
20、下列流程中哪一个是正确的( )A、专利申请流程:提交申请→受理→发明专利申请公布→ 初审→发明专利申请实质审查→授权 B、制定设计方案流程:收集信息→设计分析→方案构思→ 方案筛选→方案呈现 C、轴承零件淬火工艺流程:落料→加热→淬火→清洗→回火→出料 D、自行车前轮装圈上轴流程:上钢丝→编花→装前轴→装内胎→装外胎→装气门