相关试卷
-
1、飞机的机翼是受自然界的哪种结构启发而设计出来的?( )
 A、树 B、蜂窝 C、鸟 D、风筝
A、树 B、蜂窝 C、鸟 D、风筝 -
2、王林家里装修完以后,觉得在进门处缺少一个鞋柜。于是王林想设计制作一个既可放鞋,又方便坐着换鞋的柜子。(1)、在制定设计方案时,需收集大量信息。以下信息中,你认为需要收集的是。(填写相应序号)
①进门处可利用的空间尺寸;②整套房子的面积;③鞋的长度;④制作鞋的材料;⑤柜门与柜体的连接方式;⑥人的身高;⑦坐着换鞋所需柜子高度。
(2)、设计任何产品都应综合考虑人、物、环境三方面因素,请从这三方面因素考虑,列出该鞋柜的设计要求。(3)、用草图表达设计思想,必要时用文字进行说明,并标明尺寸。(4)、请简要说明你如何实现该柜子的稳定性和强度。 -
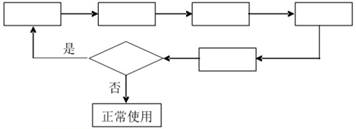
3、小强家水龙头坏了,需要更换水龙头。小强学习通用技术课程后,决定自己更换水龙头。请按以下要求完成本题。(1)、小强家里有的工具和材料是尖嘴钳、螺丝刀、新水龙头、生料带、活动扳手、剥线钳,他更换水龙头需要选择的工具是 , 材料是新水龙头和 。(2)、更换新水龙头需要以下环节:
A.关总水阀 B.开总水阀 C.上新水龙头 D.下水龙头 E.检验是否漏水 F.新水龙头螺纹处缠生料带
请将合理的环节填入下图。(填写相应字母)
-
4、如图是一款太阳能草坪灯。顶端是太阳能电池板,产生的电能可以提供给LED灯使用,白天产生的电能可以储存起来用于晚上的供电,白天充满电后会自动停止充电。夜幕降临时,草坪灯能自动点亮,白天灯自动熄灭。请回答下列问题。
 (1)、在草坪灯系统中,除了LED灯自动开关控制外,还有的自动控制是。(2)、请补充完整下面LED灯自动开关的控制系统框图。
(1)、在草坪灯系统中,除了LED灯自动开关控制外,还有的自动控制是。(2)、请补充完整下面LED灯自动开关的控制系统框图。
① ②
(3)、上述控制系统框图中检测光线强度的电子元器件是 。(4)、LED灯晚上最大发光时间取决于白天充电电池充电存储的电量,这体现了系统的性。(选填“目的性”、“相关性”或“动态性”) -
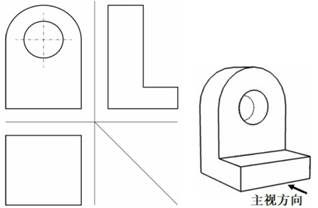
5、如图所示工件,中间圆孔直径为50mm,补全下列三视图所缺线条(要求保留作图痕迹)并在主视图上标出中间圆孔的尺寸。
-
6、位于镇远古镇的青龙洞古建筑群,占地21000平方米,有青龙洞、紫禅书院、中禅院、万寿宫、祝圣桥和香炉岩六部分共36座单体建筑组成,集儒、道、佛、会馆、桥梁及绎道建筑文化于一身:分别采用了“吊”、“借”、“附”、“嵌”、“筑”等多种工艺,在一段悬崖上筑出中元洞、紫阳洞、青龙洞、万寿宫等一片阁楼洞天。它气势雄伟、构思大胆、布局精巧。下列关于青龙洞建筑群的叙述错误的是( )
 A、青龙洞建筑因为地处悬崖绝壁,地势不规则,具有独特的建筑结构 B、青龙洞建筑只能赏析其独特的建筑风格,但不具有文化特色的欣赏价值 C、青龙洞建筑在空间塑造、建筑构架设计、装饰手法运用等方面都有其独特的价值 D、青龙洞建筑完美的将少数民族特色和自然地理相融合
A、青龙洞建筑因为地处悬崖绝壁,地势不规则,具有独特的建筑结构 B、青龙洞建筑只能赏析其独特的建筑风格,但不具有文化特色的欣赏价值 C、青龙洞建筑在空间塑造、建筑构架设计、装饰手法运用等方面都有其独特的价值 D、青龙洞建筑完美的将少数民族特色和自然地理相融合 -
7、电热毯是冬季常用防寒用品,如图是调温型电热毯电路图,在该电路中出现的电子元器件除了单刀双掷开关、电热丝和LED指示灯以外,还有( )
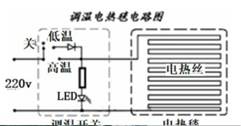 A、电容器、电阻 B、二极管、电阻 C、三级管、电阻 D、二级管、保险丝
A、电容器、电阻 B、二极管、电阻 C、三级管、电阻 D、二级管、保险丝 -
8、工业合成氨气,温度越低越有利于氨气的合成,但是在低温下催化剂却难以有效发挥其作用;压强越大越能提高氨气的产率,但是对设备的强度要求也高。经过反复试验,最终得出在500℃和300atm的条件下的合成氨的工艺。这反映了系统的( )A、动态性 B、环境适应性 C、层次性 D、相关性
-
9、在制作某零件时,先在图纸上按1:2的比例绘出技术图样,零件的某边长实际长度是2mm,我们在图样中标注此边长时,应标注( )A、2mm B、4mm C、2 D、4
-
10、石油是目前的主要能源,而汽车是石油消耗的一大源头,为了节省燃油,我们可以采取很多优化措施,下列做法不正确的是( )A、合理使用汽车空调 B、保持轮胎合适的气压 C、每次加油时将油箱加满 D、减少不必要的负载
-
11、如图,现在很多乡村道路上开始使用这种太阳能路灯,这样的设计主要体现了( )
 A、技术规范原则 B、可持续发展原则 C、美观原则 D、道德原则
A、技术规范原则 B、可持续发展原则 C、美观原则 D、道德原则 -
12、在我们的日常生活中,有很多人工控制和自动控制现象。下列选项中是人工控制的是( )
①旋钮式台灯开关 ②驾驶手动档汽车 ③电梯上下运行控制 ④普通自来水龙头 ⑤花房的恒温控制
A、①②④ B、②⑤ C、①④ D、③⑤ -
13、如图所示的红外线自动控制垃圾桶,利用感应开关感应垃圾桶周围是否有人,然后控制电机运作,将垃圾桶桶盖打开。为了防止人经过时产生误操作,该桶设置了延时功能,当人离开红外线的感应范围时,传感器驱动电机运作,将垃圾桶桶盖关闭。该系统的被控对象是( )A、传感器 B、红外线 C、桶盖 D、电机
-
14、为了延长电视机使用寿命,以下操作正确的是( )
 A、长时间不用 B、频繁开关机 C、用湿布擦拭内部和外壳 D、不使用时断掉电源,注意防尘、防潮
A、长时间不用 B、频繁开关机 C、用湿布擦拭内部和外壳 D、不使用时断掉电源,注意防尘、防潮 -
15、下列不是标准件的是( )A、灯泡
 B、汽车钥匙
B、汽车钥匙  C、网线的水晶头
C、网线的水晶头  D、螺母
D、螺母 
-
16、小张在某购物网站上准备购买一支新款的笔,但需要支付邮费,后来他发现购买一-只笔和购买三支笔的邮费是相同的,于是他找到也需购买此笔的两位同学一起在网上买下三支同样的笔,这样他们三个可以平分邮费。这种流程优化是( )A、工期优化 B、成本优化 C、技术优化 D、质量优化
-
17、下列属于流程图的是( )A、多媒体教室的配置清单 B、儿童玩具的组装示意图 C、班级学生的坐位表 D、通用技术实验室财产明细表
-
18、下列不属于划线工具的是( )A、划规
 B、角尺
B、角尺  C、划针
C、划针  D、手锯
D、手锯 
-
19、将一根长为1m、直径为20mm的铁棒截一段长30cm且截口光滑的铁棒。下列操作流程合理的是( )
 A、钢尺量取30cm→划针划线→将铁棒安装在台虎钳上→钢锯割锯→锉刀锉削 B、将铁棒安装在台虎钳上→钢尺量取30cm→划针划线→钢锯割锯→锉刀锉削 C、钢尺量取30cm→将铁棒安装在台虎钳上→划针划线→钢锯割锯→锉刀锉削 D、钢尺量取30cm→划针划线→钢锯割锯→将铁棒安装在台虎钳上→锉刀锉削
A、钢尺量取30cm→划针划线→将铁棒安装在台虎钳上→钢锯割锯→锉刀锉削 B、将铁棒安装在台虎钳上→钢尺量取30cm→划针划线→钢锯割锯→锉刀锉削 C、钢尺量取30cm→将铁棒安装在台虎钳上→划针划线→钢锯割锯→锉刀锉削 D、钢尺量取30cm→划针划线→钢锯割锯→将铁棒安装在台虎钳上→锉刀锉削 -
20、在消毒液的说明书中,可以不用写明的是( )
 A、消毒液的成分 B、消毒液的使用方法 C、消毒液的制作方法 D、消毒液的保存方法
A、消毒液的成分 B、消毒液的使用方法 C、消毒液的制作方法 D、消毒液的保存方法