相关试卷
-
1、小明制作好益智玩具之后,试图申请专利,却发现市场上已有类似的专利产品,造成这种情况的原因,下列分析较合理的是( )A、在明确问题时,没有明确问题的内容及价值 B、在明确问题时,没有明确解决问题受到的限制条件 C、在制作玩具模型后,并没有进行相关技术试验 D、在设计分析时,没有从产品设计三要素深入分析
-
2、小明计划开发一款针对小学生玩的益智玩具,以下选取了小明在设计中的一部分工作步骤,请你按设计的一般过程进行排序( )
①收集一些研发益智玩具相关的专利、国家标准等资料
②通过问卷调查对小学生进行需求调查,确定研发方向
③进行设计分析,画出草图
④制作玩具模型并进行相关测试、评估、优化
A、①②③④ B、②①④③ C、①②④③ D、②①③④ -
3、在发现与明确问题的基础上,紧接着制订设计方案的顺序为( )A、收集信息、方案构思、设计分析、方案呈现、方案筛选 B、收集信息、设计分析、方案构思、方案呈现、方案筛选 C、收集信息、设计分析、方案构思、方案筛选、方案呈现 D、收集信息、方案构思、方案筛选、设计分析、方案呈现
-
4、以下关于各产品从设计一般原则的角度分析,说法正确的是( )

图甲

图乙

图丙

图丁
A、图甲断点抽拉式的垃圾袋,体现了设计的经济原则 B、图乙可折叠的手机支架设计,体现了设计的技术规范原则 C、图丙斜口式饮水杯设计,体现了设计的道德原则 D、能摆放锅盖的支架设计,体现了设计的实用原则 -
5、以前电路图的设计都是手工绘制,繁琐易出错。随着电子技术的发展,尤其是计算机技术的发展,专门的电路图设计软件大大方便了电路设计,以此为依托的设计层出不穷。从技术与设计关系的角度看,这一案例说明了( )A、设计是技术的平台 B、设计是技术发展的基础 C、技术发展为设计创新提供了条件 D、技术的发展离不开设计
-
6、在共享经济盛行的环境背景下,共享汽车行业也是如火如荼。下列说法不合理的是( )A、纯电动共享汽车电量有限,有可能遇到没电的困扰,这并不能体现技术的复杂性 B、共享汽车的出现节约了社会资源,体现了技术的目的性 C、手机下载App后,可进行预约、开锁、还车、付款等操作,体现了技术的综合性 D、通过手机App或刷会员卡开车门,无需使用车钥匙,体现了技术的创新性
-
7、下列不属于技术活动的是( )A、科学家在实验室研究印度洋海啸形成的原因 B、研究人员对新研发的新冠疫苗在小白鼠身上进行移植试验 C、地面医务人员通过遥测手段,实时监测宇航员各项身体指标 D、指挥中心通过北斗定位系统等相关技术实现了神舟飞船的成功着陆
-
8、某同学制作了海豹顶球模型,如图甲所示是该同学制作的模型正面示意图。海豹图形已和展示木板粘接;如图乙所示是背面的顶球杆限位导轨装置及主要尺寸,球杆可以上下活动且顶球模型板上还有一转动轴。请你设计一个安装在转动轴上的部件,设计要求如下:

A.部件安装在转动轴上并能手动转动:
B.手动转动时可以实现球杆上下运动:
C.顶球上下运动时,最低处和最高处的高度差为30mm。
根据上述设计要求,完成以下任务:
(1)、①简单画出该部件的设计草图,必要时用文字说明:②在设计草图上标注主要尺寸;
(2)、对该顶球装置进行性能测试,以下哪一项试验不合理。(在①部件与转动轴是否能一起转动;②转动轴转动时球杆是否能上下运动:③顶球上下运动时的高度差是否为30mm;④顶球与球杆连接是否牢固中选择合适的选项填入横线中) -
9、补全三视图中所缺的6条图线。

-
10、如图甲所示,小明看到手工锤肉比较辛苦,于是设计了图乙的一款仿手工锤肉机。在模型试验阶段,如图丙所示,他想设计利用电动机连续锤肉的机械装置,摆锤通过连接结构能够上下锤肉。请根据描述完成以下任务:
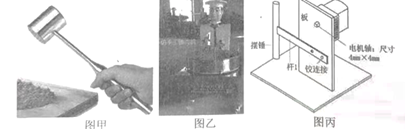 (1)、小明发现问题的途径是(在“①收集和分析信息:②观察日常生活:③技术研究与技术试验”中选择合适的选项,将序号填入横线处)(2)、设计该装置时,下列因素中可以不考虑的是(在 “①电机轴的尺寸:②安装方式:③肉的重量”中选择合适的选项,将序号填入横线处):(3)、小明在装置安装完成后进行试验,放好肉后开启电机观察装置拍打情况及可靠性、该试验方法属于(在“①模拟试验: ②移植试验:③强化试验”中选择合适的选项,将序号填入横线处)
(1)、小明发现问题的途径是(在“①收集和分析信息:②观察日常生活:③技术研究与技术试验”中选择合适的选项,将序号填入横线处)(2)、设计该装置时,下列因素中可以不考虑的是(在 “①电机轴的尺寸:②安装方式:③肉的重量”中选择合适的选项,将序号填入横线处):(3)、小明在装置安装完成后进行试验,放好肉后开启电机观察装置拍打情况及可靠性、该试验方法属于(在“①模拟试验: ②移植试验:③强化试验”中选择合适的选项,将序号填入横线处) -
11、人工在道路上铺设地砖是一种重体力活,需要工人蹲着或是弯腰铺设。某公司开发研制的自动铺砖机(如图所示),工人站在操作台上,只需把砖块排列好,砖块会在重力作用下沿着铺砖机的轨道下滑,自动地铺在地面上。这台机器的特点是:
①能根据砖块的形状,铺出各种不同图案的路面:
②铺砖机的宽度可调节,适合不同宽度的路面:
③铺设道路的速度快,工作效率高:
④工人在对砖块排列时,手臂及腰部基本处于自然状态;
⑤工人操作不需要弯腰或蹲着搬地砖,劳动强度低;
⑥使用电能不污染环境:
⑦用工数量少,降低人工费用,节约成本。

请根据上述表述回答以下问题(在横线处填写 合适的序号)
(1)、采用铺路机后,工人可以不必蹲着或是弯腰工作,这体现了技术可以(从①保护人:②解放人:③发展人中选择一项,将序号填入横线处)。(2)、能体现设计实用原则的是、;(3)、能使人在工作时感觉舒适的是、;(4)、该技术产生于人们的生产活动,随着机器生产的发展最终变为现实,反映了人与客观世界的互动关系。这体现了技术的 (从①综合性 ②复杂性③实践性④专利性中选择项,将序号填入横线处) -
12、如图所示的零件,错标、多标的尺寸各有几处:( )
 A、1处、2处 B、1处、3处 C、3处、2处 D、4处、3处
A、1处、2处 B、1处、3处 C、3处、2处 D、4处、3处 -
13、如图所示是孙字构思的一款学生在宿舍里使用的台灯。 以下关于该方案开关部分的比较权衡,合理的是( )

①旋钮式开关

②触点式开关

③触摸式开关

④声控开关

⑤光控开关
A、①②③④⑤ B、①②③④ C、①②③⑤ D、①②③ -
14、如图所示是一款学生使用的台灯,设计时要考虑的因素很多,以下关于台灯的设计分析中不正确是( )
 A、从“人”的角度,学生处于生长发育期,光线要柔和 B、除了基本功能之外,还应适当增加日历、笔简等附加功能,是从“环境”的角度考虑的可夹持底座 C、设计时应尽可能采用标准件,可以简化制作过程,又能实现通用通换 D、可夹持底座设计是从环境适应性的角度考虑
A、从“人”的角度,学生处于生长发育期,光线要柔和 B、除了基本功能之外,还应适当增加日历、笔简等附加功能,是从“环境”的角度考虑的可夹持底座 C、设计时应尽可能采用标准件,可以简化制作过程,又能实现通用通换 D、可夹持底座设计是从环境适应性的角度考虑 -
15、如图所示的滑动式水龙头,滑动手柄就能打开水,滑动手柄上的触摸屏,可预先设定水温高低和水量大小。从人机关系的角度分析,下列说法中不合理的是( )
 A、手柄的滑动范围,考虑了人体动态尺寸 B、极简设计、造型独特,考虑了人的心理需求 C、水温和水量数字式设定,考虑了信息的交互 D、独特的滑轨设计,考虑了高效目标
A、手柄的滑动范围,考虑了人体动态尺寸 B、极简设计、造型独特,考虑了人的心理需求 C、水温和水量数字式设定,考虑了信息的交互 D、独特的滑轨设计,考虑了高效目标 -
16、如图所示为某款椅子的设计图,图中所标注的尺寸中主要是从人的动态尺寸考虑的是: ( )
 A、340 和20° B、只有20° C、只有420 D、只有Φ450
A、340 和20° B、只有20° C、只有420 D、只有Φ450 -
17、如图所示是故倾斜的喷壶, 倾斜面的壶底设计,可以快速倒f壹里的水,从设计中的人机关系角度分析,下列说法中不正确的是( )
 A、倾斜更少的角度就可以把水倒出来,实现了高效目标 B、提手圆弧形设计,实现了舒适目标 C、该喷壶与人接触的部分没有尖角和锋利的边槽,主要实现了安全目标 D、透明材料制作,实现了健康目标
A、倾斜更少的角度就可以把水倒出来,实现了高效目标 B、提手圆弧形设计,实现了舒适目标 C、该喷壶与人接触的部分没有尖角和锋利的边槽,主要实现了安全目标 D、透明材料制作,实现了健康目标 -
18、如图所示是三根300mm×30mm×20mm的木条榫接而成的支架。三根木条结构正确的是( )
 A、
A、 B、
B、 C、
C、 D、
D、
-
19、孙宇家里的热水器,使用时必须把原先管内的冷水全部放完后,才能正常的洗漱,这样会造成水的很大浪费,于是他决定发明一个节水型的热水器。下列关于该问题的说法不正确的是:( )A、孙宇发现问题的途径是收集与分析信息 B、孙宇为明确该问题可以运用问卷调查、查阅资料等方法 C、孙宇应该明确该问题受到的限制 D、孙宇应充分考虑个人技术能力与条件
-
20、如图所示,工作人员借助计算机等设备进行的汽车NVH检测,为汽车噪声、振动与声振粗糙度性能提升提供有效的保障。该试验方法属于( )
 A、优选试验法 B、模拟试验法 C、虚拟试验法 D、强化试验法
A、优选试验法 B、模拟试验法 C、虚拟试验法 D、强化试验法