相关试卷
-
1、如图所示是腿外骨骼助力行走器,适合爬山、散步、康复行走助力。下列关于该产品分析与评价不合理的是( )
 A、采用铝合金材料,提高了支架的强度 B、可以用于康复行走助力,考虑了特殊人群 C、固定绑带长度可调,考虑了人的动态尺寸 D、一键式旋钮易于调节助力挡位大小,实现了人机关系的高效目标
A、采用铝合金材料,提高了支架的强度 B、可以用于康复行走助力,考虑了特殊人群 C、固定绑带长度可调,考虑了人的动态尺寸 D、一键式旋钮易于调节助力挡位大小,实现了人机关系的高效目标 -
2、如图所示的神舟二十号载人飞船与“天宫”空间站成功对接,开始了长达6个月的太空科研探索。下列关于该技术产品的分析不合理的是( )
 A、配备了发电效率高的太阳能板,体现了设计的可持续发展原则 B、采用新型的结构和材料,具有更高的安全性和可靠性,体现了设计的创新原则 C、在研制过程中,优化设计了承载空间,使飞船的“带货”能力更强,体现了技术的实践性 D、为了能够完成复杂科学技术实验,配备了多种实验设备、保障设施,体现了技术的综合性
A、配备了发电效率高的太阳能板,体现了设计的可持续发展原则 B、采用新型的结构和材料,具有更高的安全性和可靠性,体现了设计的创新原则 C、在研制过程中,优化设计了承载空间,使飞船的“带货”能力更强,体现了技术的实践性 D、为了能够完成复杂科学技术实验,配备了多种实验设备、保障设施,体现了技术的综合性 -
3、小明设计了如图所示的开关电路模型,实现第29题侧支撑脚收起功能,当按下开关按钮后,侧支撑脚将自动收起(电机M的电流从+流向-)。
 (1)、小明完成电路连接后,不管怎么按按钮,电机始终不转,下列原因可能的是(多选)________A、电阻R3阻值过大 B、二极管VD1短接 C、电阻R1阻值过大 D、电容C1短接(2)、小明发现实际使用时,侧支撑脚已经升起到位,电机还在空转,下列改进措施合理的是(多选)________A、更换更小的C2 B、更换更小的Cl C、更换更小的R2 D、更换更小的RI(3)、小明准备改进电路,实现如下功能:当有人乘坐且车开始行驶时(有速度时,速度传感器输出高电位:有压力时,压力传感器输出低电位,否则相反输出)侧支撑脚自动收起。请用两个2输入与非门补全虚线框1中的电路
(1)、小明完成电路连接后,不管怎么按按钮,电机始终不转,下列原因可能的是(多选)________A、电阻R3阻值过大 B、二极管VD1短接 C、电阻R1阻值过大 D、电容C1短接(2)、小明发现实际使用时,侧支撑脚已经升起到位,电机还在空转,下列改进措施合理的是(多选)________A、更换更小的C2 B、更换更小的Cl C、更换更小的R2 D、更换更小的RI(3)、小明准备改进电路,实现如下功能:当有人乘坐且车开始行驶时(有速度时,速度传感器输出高电位:有压力时,压力传感器输出低电位,否则相反输出)侧支撑脚自动收起。请用两个2输入与非门补全虚线框1中的电路 (4)、小明想增加一个用于自动放下侧支撑脚(电机M的电流从-流向+)的开关。为了避免电路短路,只有当J1不工作时,按住开关才能放下脚撑。请在下图的虚线框2中用现有的元器件将电路补充完整(三极管采用共发射极接法)
(4)、小明想增加一个用于自动放下侧支撑脚(电机M的电流从-流向+)的开关。为了避免电路短路,只有当J1不工作时,按住开关才能放下脚撑。请在下图的虚线框2中用现有的元器件将电路补充完整(三极管采用共发射极接法)
-
4、为了实现某款电动自行车侧支撑脚的收放,小明想在把手上增设一个按钮开关,通过按开关实现收放侧支撑脚。装置安装在U型后平叉相距为40mm、直径为φ6mm的两个通孔上,侧支撑脚直径为φ20mm。请帮助小明设计该装置的机械部分,设计要求如下:

(a)侧支撑脚能收回和放下,工作过程保持稳定;
(b)装置能与U型后平叉稳固连接;
(c)不能对侧支撑脚及U型后平叉进行加工;
(d)采用单个电机驱动;
(e)其他材料自选。
(1)、请在头脑中构思符合设计要求的多个方案,并画出其中最优方案的设计草图(电机可用方框表示),简要说明方案的工作过程(2)、在草图上标注主要尺寸(3)、考虑对侧支撑脚收放系统的优化,下列措施合理的有(多选)____________A、增加骑行时未收起侧支撑脚的报警装置; B、增加双脚遮拦传感器,只要检测无双脚遮拦时支撑脚就自动收回; C、增加坐垫压力传感器和车速度传感器,同时检测到有压力和车速时侧支撑脚自动收回。 -
5、如图所示为某款电动自行车的侧支撑脚部分,小明在放学的路上看到有人在骑车时忘了收起侧支撑脚,且收放侧支撑脚也比较费力,于是收集了相关的资料,准备设计一个能收放侧支撑脚的电动装置。请完成以下任务:
 (1)、小明发现问题的途径是________A、观察日常生活 B、收集和分析信息 C、技术研究与技术试验(2)、小明对电动装置进行了如下分析,以下不合理的是________A、电动装置的设计只考虑物的因素 B、设计时尽可能采用标准件 C、装置与电动车的连接要有足够的强度(3)、小明在完成筛选和细化方案后,下一步要做的是________A、技术试验 B、绘制机械加工图 C、编写产品说明书(4)、在设计的过程中会进行相关的技术试验,下列说法或做法中合理的是(多选)__________A、在电脑中建立电动装置模型,检验设计的可行性,属于虚拟试验法 B、在车座上一次性加上150公斤的配重,观察并记录侧支撑脚的变形情况 C、电动装置安装完毕,通电测试能否驱动侧支撑脚自如收放
(1)、小明发现问题的途径是________A、观察日常生活 B、收集和分析信息 C、技术研究与技术试验(2)、小明对电动装置进行了如下分析,以下不合理的是________A、电动装置的设计只考虑物的因素 B、设计时尽可能采用标准件 C、装置与电动车的连接要有足够的强度(3)、小明在完成筛选和细化方案后,下一步要做的是________A、技术试验 B、绘制机械加工图 C、编写产品说明书(4)、在设计的过程中会进行相关的技术试验,下列说法或做法中合理的是(多选)__________A、在电脑中建立电动装置模型,检验设计的可行性,属于虚拟试验法 B、在车座上一次性加上150公斤的配重,观察并记录侧支撑脚的变形情况 C、电动装置安装完毕,通电测试能否驱动侧支撑脚自如收放 -
6、小明设计了如图所示的热水器电路模型:当水温较低时,快速加热;一旦高于设定温度T1,转为慢速加热;当水温升至设定上限温度T2时,停止加热;随后当水温降至设定温度T3,转为慢速加热,最终使水温保持在T3~T2之间。其中发光二极管LED发光为加热状态,越亮表示加热越快。下列说法不正确的是( )
 A、Rt为负系数的热敏电阻 B、增大Rp4,可以调大从快速加热进入慢速加热的设定温度 C、将Rp3的活动触点调节至最上端,加热器不会再进入慢速加热状态 D、调大Rp5,会减小保温的区间
A、Rt为负系数的热敏电阻 B、增大Rp4,可以调大从快速加热进入慢速加热的设定温度 C、将Rp3的活动触点调节至最上端,加热器不会再进入慢速加热状态 D、调大Rp5,会减小保温的区间 -
7、如图所示的信号处理电路,A.B为输入信号,F为输出信号。下列波形关系中不可能出现的是( )
 A、
A、 B、
B、 C、
C、 D、
D、
-
8、下列元器件的引脚数由多到少排序正确的是( )
①PNP型三极管 ②电解电容 ③555芯片 ④四2输入与非门芯片
A、③④②① B、④③②① C、③④①② D、④③①② -
9、如图所示为一款被称为“光剑”的灭蚊神器及其工作流程图,请完成以下小题。
 (1)、下列关于该流程的说法中不恰当的是( )A、为了提高灭蚊效率,可省去蚊子检测环节 B、中央处理器计算蚊子XYZ坐标环节可划分为更具体的若干个小环节 C、整个工作流程中没有并行环节 D、利用更好的目标追踪函数来优化检测环节以提高灭蚊效率(2)、下列关于激光灭蚊系统分析不恰当的是( )A、系统由摄像头、中央处理器、激光器、功率放大器等组成,体现了系统的整体性 B、中央处理器计算蚊子XYZ坐标,体现了系统分析的科学性原则 C、室内和室外都能使用,具有良好的环境适应性 D、需定期维护和清洁,体现了系统的动态性(3)、激光灭蚊系统主要由识别追踪子系统和强光照射子系统组成,识别追踪子系统识别并追踪要消灭的雌蚊子,中央处理器根据目标信息,调整功率放大器,控制激光器发射强光束实现灭蚊。下列关于强光照射子系统的分析中恰当的是( )A、雌蚊子是输入量 B、该控制子系统有反馈环节 C、被控对象是激光器 D、控制量是中央处理器发出的指令
(1)、下列关于该流程的说法中不恰当的是( )A、为了提高灭蚊效率,可省去蚊子检测环节 B、中央处理器计算蚊子XYZ坐标环节可划分为更具体的若干个小环节 C、整个工作流程中没有并行环节 D、利用更好的目标追踪函数来优化检测环节以提高灭蚊效率(2)、下列关于激光灭蚊系统分析不恰当的是( )A、系统由摄像头、中央处理器、激光器、功率放大器等组成,体现了系统的整体性 B、中央处理器计算蚊子XYZ坐标,体现了系统分析的科学性原则 C、室内和室外都能使用,具有良好的环境适应性 D、需定期维护和清洁,体现了系统的动态性(3)、激光灭蚊系统主要由识别追踪子系统和强光照射子系统组成,识别追踪子系统识别并追踪要消灭的雌蚊子,中央处理器根据目标信息,调整功率放大器,控制激光器发射强光束实现灭蚊。下列关于强光照射子系统的分析中恰当的是( )A、雌蚊子是输入量 B、该控制子系统有反馈环节 C、被控对象是激光器 D、控制量是中央处理器发出的指令 -
10、如图所示为一个简单连杆机构,在液压杆的作用下,带动连杆1运动。下列说法不正确的是( )
 A、液压装置从如图位置开始伸长的瞬间,连杆1右端有向上运动的趋势 B、液压装置从如图位置开始伸长的瞬间,连杆2受压 C、液压装置从如图位置开始收回的瞬间,连杆3受压 D、液压装置从如图位置开始收回的瞬间,连杆4受弯曲
A、液压装置从如图位置开始伸长的瞬间,连杆1右端有向上运动的趋势 B、液压装置从如图位置开始伸长的瞬间,连杆2受压 C、液压装置从如图位置开始收回的瞬间,连杆3受压 D、液压装置从如图位置开始收回的瞬间,连杆4受弯曲 -
11、小明准备把小钢块加工成如图所示的工件。下列工具中用不到的是( )
 A、
A、 B、
B、 C、
C、 D、
D、
-
12、如图所示的轴测图,箭头为主视方向,其对应的视图中不正确的是( )
 A、
A、 B、
B、 C、
C、 D、
D、
-
13、小明准备用实木板制作如图所示手提盒的盒盖。下列4种排料方案中合理的是( )
 A、
A、 B、
B、 C、
C、 D、
D、
-
14、如图所示是某款手机。下列从人机关系角度的分析中,恰当的是( )
 A、电池能快速充满电,实现了高效目标 B、支持单屏、双屏、三屏自由切换,考虑了特殊人群的需要 C、独特纹理、经典徽标与配色,考虑了人的心理需求 D、通话防漏音,保护隐私安全,实现了安全目标
A、电池能快速充满电,实现了高效目标 B、支持单屏、双屏、三屏自由切换,考虑了特殊人群的需要 C、独特纹理、经典徽标与配色,考虑了人的心理需求 D、通话防漏音,保护隐私安全,实现了安全目标 -
15、如图所示为一款试飞的国产六代机及其评价图。根据评价图,下列分析中不恰当的是( )
 A、该评价是对设计成果的评价 B、隐身性能好 C、智能化作战能力较强 D、设计成本低
A、该评价是对设计成果的评价 B、隐身性能好 C、智能化作战能力较强 D、设计成本低 -
16、小明发现班级手举牌(如图a所示)斜靠在墙面时因为“头重脚轻”,经常翻倒在地,容易被同学踩踏,于是他想设计一个手举牌挂钩来解决这个问题,请完成以下任务:
 (1)、小明发现问题的途径是________A、观察日常生活 B、收集和分析信息 C、技术研究与技术试验(2)、经调查和实地考察之后,小明发现可利用班级墙壁上已有的两枚钉子来安装挂钩,已知钉子的尺寸如图b所示。下列属于设计手举牌挂钩限制因素的是________A、墙面材料 B、教室的大小 C、手举牌的加工工艺 D、钉子的尺寸(3)、小明为手举牌挂钩制定了如下设计要求:
(1)、小明发现问题的途径是________A、观察日常生活 B、收集和分析信息 C、技术研究与技术试验(2)、经调查和实地考察之后,小明发现可利用班级墙壁上已有的两枚钉子来安装挂钩,已知钉子的尺寸如图b所示。下列属于设计手举牌挂钩限制因素的是________A、墙面材料 B、教室的大小 C、手举牌的加工工艺 D、钉子的尺寸(3)、小明为手举牌挂钩制定了如下设计要求:①挂钩安装在两枚钉子上且不易掉落
②手举牌的手柄朝下,竖直挂在挂钩上且不易掉落
③手举牌取放方便且放置时牌面文字不会被遮挡
④不允许对手举牌进行任何加工
请你根据以上要求设计一个手举牌挂钩(以2mm厚的钢板为原料),画出设计草图(必要时可用文字补充说明)
(4)、在你的设计草图上标注主要尺寸 -
17、如下图a所示为仓储式货架,小明为保证其日用安全,在货架上加装倾角传感器以进行实时监测,搭建了如图b所示的货架倾倒预警控制系统,其工作过程为:控制柜通过倾角传感器获取货架倾角信号,倾角越大,变频器发出的频率信号越高,报警灯闪烁得越快,当倾角>1.2°时启动喇叭语音警报,确保人员安全。请结合示意图及其描述完成以下任务:
 (1)、下列关于货架及其预警系统的说法中不正确的是______A、通过斜撑与立柱构成的桁架结构提高货架强度,主要从“物”的要素考虑 B、在货架上增设预警系统,令其日用过程更安全,体现了设计的创新原则 C、层板中的栅格采用竖向安装方式(如图a所示)可承载更重的货物,体现了设计的技术规范原则(2)、小明在制定货架倾倒预警系统设计方案的过程中,需要经历以下哪些阶段______
(1)、下列关于货架及其预警系统的说法中不正确的是______A、通过斜撑与立柱构成的桁架结构提高货架强度,主要从“物”的要素考虑 B、在货架上增设预警系统,令其日用过程更安全,体现了设计的创新原则 C、层板中的栅格采用竖向安装方式(如图a所示)可承载更重的货物,体现了设计的技术规范原则(2)、小明在制定货架倾倒预警系统设计方案的过程中,需要经历以下哪些阶段______①制作模型 ②绘制图样 ③产品测试 ④设计分析 ⑤方案筛选
A、①②③ B、④⑤ C、①③ D、②④⑤(3)、将图b中的货架倾倒灯光预警子系统用下面的方框图表示,下列补全系统框图的相应内容正确的是______ A、①频率信号;②喇叭;③语音报警 B、①频率信号;②报警灯;③闪烁状态 C、①继电器衔铁吸合;②喇叭;③语音报警(4)、下列关于货架倾倒预警控制系统试验的说法中不正确的是______A、电路实物搭建之前,先利用livewire软件进行仿真测试 B、在A点处施加水平向右的500N的力,观察货架是否发生倾倒 C、在A点施加不同大小、水平向右的力,使货架产生不同程度倾斜,观察报警灯闪烁情况
A、①频率信号;②喇叭;③语音报警 B、①频率信号;②报警灯;③闪烁状态 C、①继电器衔铁吸合;②喇叭;③语音报警(4)、下列关于货架倾倒预警控制系统试验的说法中不正确的是______A、电路实物搭建之前,先利用livewire软件进行仿真测试 B、在A点处施加水平向右的500N的力,观察货架是否发生倾倒 C、在A点施加不同大小、水平向右的力,使货架产生不同程度倾斜,观察报警灯闪烁情况 -
18、如图所示的智能花卉温室系统由传感器模块、数据处理传输模块及执行模块组成。温度作为关键环境参数直接影响花卉生长,温度控制子系统的控制逻辑为:当监测温度低于设定阈值时,DTU利用通信模组控制继电器,启动热风机加热,维持温室温度在适宜范围,确保花卉生长环境稳定。请根据示意图及其描述完成以下小题:
 (1)、下列关于智能花卉温室系统的说法中,正确的是( )A、传感器模块负责检测空气及土壤中的温湿度,体现了系统的目的性 B、通信模组损坏将导致执行模块中的各要素无法及时工作,体现了系统的相关性 C、系统搭建时,应将温度传感器置于热风机出风口处,以精准检测温度变化 D、DTU接收、处理、分析传感器发出的电信号,体现了系统分析的科学性原则(2)、在温度控制子系统中,下列分析正确的是( )A、温度传感器用以检测输入量 B、DTU的性能是该系统优化的约束条件 C、被控量是热风机的出风温度 D、启动水泵提高室内湿度时使室温下降,属于干扰因素
(1)、下列关于智能花卉温室系统的说法中,正确的是( )A、传感器模块负责检测空气及土壤中的温湿度,体现了系统的目的性 B、通信模组损坏将导致执行模块中的各要素无法及时工作,体现了系统的相关性 C、系统搭建时,应将温度传感器置于热风机出风口处,以精准检测温度变化 D、DTU接收、处理、分析传感器发出的电信号,体现了系统分析的科学性原则(2)、在温度控制子系统中,下列分析正确的是( )A、温度传感器用以检测输入量 B、DTU的性能是该系统优化的约束条件 C、被控量是热风机的出风温度 D、启动水泵提高室内湿度时使室温下降,属于干扰因素 -
19、以下结构设计主要从稳定性角度考虑的是( )A、
 B、
B、 C、
C、 D、
D、
-
20、如图所示为离心调速器原理图(弹簧套在竖轴上与套筒并不连接),当蒸汽机转速加快,重球上升带动套筒上移的过程中,下列构件基本受力形式的分析正确的是( )
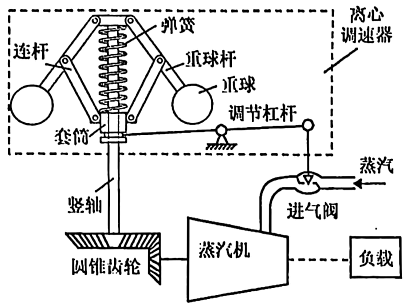 A、连杆受拉、重球杆受弯曲、弹簧受压 B、连杆受拉、重球杆受拉、弹簧受拉 C、连杆受压、重球杆受弯曲、弹簧受拉 D、连杆受弯曲、重球杆受弯曲、弹簧受压
A、连杆受拉、重球杆受弯曲、弹簧受压 B、连杆受拉、重球杆受拉、弹簧受拉 C、连杆受压、重球杆受弯曲、弹簧受拉 D、连杆受弯曲、重球杆受弯曲、弹簧受压