相关试卷
- 2026年1月浙江省普通高校招生选考科目考试通用技术试卷
- 浙江省浙南名校联盟2025-2026学年高二上学期期中联考技术试题-高中通用技术
- 浙江省桐乡市高级中学2025-2026学年高二上学期12月月考技术试题-高中通用技术
- 浙江省浙东北县域名校发展联盟(ZDB)2025-2026学年高三上学期11月联考技术试题-高中通用技术
- 浙江省宁波中学2025-2026学年高二上学期期中考试技术试卷(学考)-高中通用技术
- 浙江省金兰教育合作组织2025-2026学年高二上学期期中联考技术试卷-高中通用技术
- 浙江省丽水市五校高中发展共同体2025-2026学年高二上学期期中联考技术试题-高中通用技术
- 重庆市黔江实验中学2025-2026学年高三上学期期中通用技术试题
- 浙江省精诚联盟2025-2026学年高二上学期10月联考技术试题-高中通用技术
- 浙江省台州市部分学校2023-2024学年高二上学期学业水平期末考试技术试题-高中通用技术
-
1、如图所示是一款新型婴儿推车,装有SUV 级减震系统,双后轮刹车系统,GPS定位系统,保障婴儿的舒适和安全。与普通婴儿推车相比,它首创单手即可实现快速折叠,质量轻,携带方便等优点。下列关于该婴儿推车的说法中,不恰当的是( )。
 A、涉及GPS定位与减震等方面的技术,体现了技术的综合性 B、不能推着婴儿车上楼梯,体现了技术的两面性 C、轮子顺滑,推车省力,体现了技术具有解放人的作用 D、可单手快速折叠,体现了技术的创新性
A、涉及GPS定位与减震等方面的技术,体现了技术的综合性 B、不能推着婴儿车上楼梯,体现了技术的两面性 C、轮子顺滑,推车省力,体现了技术具有解放人的作用 D、可单手快速折叠,体现了技术的创新性 -
2、小明在家中搞卫生,搞完卫生后发现木质把手拖把不能悬挂起来,于是他在家中找了圆头木螺钉,用螺丝刀把螺钉拧到了把手上方(如图 1 所示),用于悬挂拖把,螺钉的相关尺寸如图 2 所示。请你帮助小明设计一个连接件,用来把拖把悬挂在墙上,设计要求如下:

A. 该连接件能固定在墙上,墙上已有2个直径为10mm的水平孔,两孔距离为18mm;
B.木质拖把能悬挂在连接件上,拿取方便;
C.拖把悬挂后不易碰落,可靠性好;
D.材料采用 3mm 厚的钢板。
请根据描述和设计要求完成以下任务:
(1)、制定设计方案前,需要明确设计的限制因素,以下因素中不属于设计的限制因素的是(在 A .连接件的材料;B .加工工艺;C .螺钉头的直径;D .拖把柄直径中选择合适的选项,将序号填入横线处);(2)、在设计分析前,需要收集一些信息,下列信息中需要收集的是(在 A .收集有关用户需求的资料;B .收集有关螺钉制作的资料;C .查阅人机工程学的有关资料中选择合适的选项,将序号填入横线处);(3)、小明找到了几种类型的连接件,其中适合用于该连接件与墙面安装的是 (只需要在以下连接件中选择一种类型,将序号填入横线处)A、 B、
B、 C、
C、 D、
D、 E、
E、 (4)、①画出连接件的设计草图,必要时可用文字说明;
(4)、①画出连接件的设计草图,必要时可用文字说明;②在设计草图上标注主要尺寸。
-
3、请补全三视图中所缺的三条图线。

-
4、如图所示为某零件的结构示意图。其中锁紧块紧贴在竖管内部,连接座1底部有两个螺纹孔(图中看不到)。其装配需要以下环节:A .连接座 1对准竖管相应位置;B .横管套在连接座2上;C .将连接座 2 安装到连接座1上;D .锁紧块紧贴竖管;E .拧紧螺栓1;F .拧紧螺栓2;G .拧紧螺栓3。请回答以下问题:
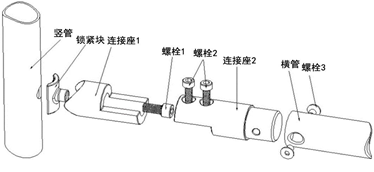 (1)、合理的装配流程为:→→→C→→B→G;(2)、竖管和横管上的孔分别为(在 A .都是光孔;B .竖管光孔,横管螺纹孔;C .都是螺纹孔中选择合适的一项,将序号填入横线处);(3)、下列工具中,适合用来拧紧题中螺栓的工具为 。A、
(1)、合理的装配流程为:→→→C→→B→G;(2)、竖管和横管上的孔分别为(在 A .都是光孔;B .竖管光孔,横管螺纹孔;C .都是螺纹孔中选择合适的一项,将序号填入横线处);(3)、下列工具中,适合用来拧紧题中螺栓的工具为 。A、 B、
B、 C、
C、
-
5、如图所示为一款可折叠多功能美腰收腹健身器。健身者可在该健身器上进行收腹、仰卧起坐、拉绳等运动,不用时又可以将其折叠起来不占空间。请回答以下问题:
 (1)、背撑外都包裹有加厚泡棉,这体现人机关系的目标(在 A .高效;B .舒适;C .健康;D .安全中选择合适的选项,将序号填入横线处)(2)、设计时要考虑很多方面,以下方面主要从“物”的角度考虑的是(在A .可折叠结构,存放 不占空间;B .高清 LED 电子表,实时数据显示;C .三角结构支撑,稳固性好中选择合适的选项,将序号填入横线处)(3)、设计师在完成该健身器的方案设计后,接下来应该要进行的是(在 A .绘制草图;B .绘制零部件的三视图;C .制作模型进行技术试验中选择合适的选项,将序号填入横线处)(4)、健身器的稳固性是保障使用者安全的重要因素之一,需要制作模型来进行试验,应该制作以下哪种模型(在A .结构模型;B .展示模型;C .功能模型中选择合适的选项,将序号填入横线处)(5)、若通过试验发现该健身器稳固性不够好,为了进一步提高其稳固性,下列措施中合理的是、(在 A .增大 L1;B .增大 L2;C .将支撑杆之间的连接方式改为焊接;D .加粗支撑杆中选择合适的选项,将序号填入横线处)
(1)、背撑外都包裹有加厚泡棉,这体现人机关系的目标(在 A .高效;B .舒适;C .健康;D .安全中选择合适的选项,将序号填入横线处)(2)、设计时要考虑很多方面,以下方面主要从“物”的角度考虑的是(在A .可折叠结构,存放 不占空间;B .高清 LED 电子表,实时数据显示;C .三角结构支撑,稳固性好中选择合适的选项,将序号填入横线处)(3)、设计师在完成该健身器的方案设计后,接下来应该要进行的是(在 A .绘制草图;B .绘制零部件的三视图;C .制作模型进行技术试验中选择合适的选项,将序号填入横线处)(4)、健身器的稳固性是保障使用者安全的重要因素之一,需要制作模型来进行试验,应该制作以下哪种模型(在A .结构模型;B .展示模型;C .功能模型中选择合适的选项,将序号填入横线处)(5)、若通过试验发现该健身器稳固性不够好,为了进一步提高其稳固性,下列措施中合理的是、(在 A .增大 L1;B .增大 L2;C .将支撑杆之间的连接方式改为焊接;D .加粗支撑杆中选择合适的选项,将序号填入横线处) -
6、如图所示为循环水养殖系统工艺流程图。其杀菌流程分为两个阶段:第一阶段关闭前置紫外线杀菌装置,打开后置紫外线杀菌装置,运行20天;第二阶段打开前置紫外线杀菌装置,关闭后置紫外线杀菌装置,运行20天。其中泵池缓冲调节主要是起到污泥沉淀的作用。关于该流程图,以下说法中正确的是( )
 A、水质优化环节在弧形筛筛滤环节之前 B、前置紫外线杀菌和后置紫外线杀菌是串行工序 C、在任意阶段中,养殖池水质的调节都要经历6个环节 D、多级生物过滤和气浮净化之间的时序可以颠倒
A、水质优化环节在弧形筛筛滤环节之前 B、前置紫外线杀菌和后置紫外线杀菌是串行工序 C、在任意阶段中,养殖池水质的调节都要经历6个环节 D、多级生物过滤和气浮净化之间的时序可以颠倒 -
7、在水平面内有一翻转机构(如图所示)。Q 点固定不动(图中未表示),连杆可绕 Q 点转动,推杆在外力的作用下可左右运动,带动物件左右翻转。以下说法中错误的是( )
 A、推杆与固定件之间既不是刚连接,也不是铰连接 B、当推杆受到力F 作用时,物件将顺时针向右翻转 C、当推杆在力 F 作用下运动到图示位置时,连杆的受力形式为受拉 D、不论推杆向左还是向右运动,推杆的受力形式都有受弯曲
A、推杆与固定件之间既不是刚连接,也不是铰连接 B、当推杆受到力F 作用时,物件将顺时针向右翻转 C、当推杆在力 F 作用下运动到图示位置时,连杆的受力形式为受拉 D、不论推杆向左还是向右运动,推杆的受力形式都有受弯曲 -
8、下列关于工艺说法正确的是( )A、锯割时,回锯过程中要施加压力,锯割行程≥2/3 锯条长 B、划规用于划出圆的线痕,划规的脚尖保持尖锐 C、喷涂油漆可以防止锈蚀和增加美观,有些油漆喷涂后要在金属表面加涂防锈漆 D、起锯时,起锯角大约为 15°不能过大或过小;起锯要做到速度慢、压力要大、行程长
-
9、如图所示是某零件的加工图,在加工过程中不需要用到的工具是( )
 A、
A、 B、
B、 C、
C、 D、
D、
-
10、如图所示为某零件的三视图,请完成下面小题。
 (1)、图中漏标的尺寸共有( )A、2 处 B、3 处 C、4 处 D、5 处(2)、用大小合适的方形钢块加工该零件,最合理的加工流程为( )A、划线→锯割→锉削→划线→锯割→钻孔→锉削 B、划线→锯割→划线→钻孔→锯割→锉削 C、划线→锯割→锉削→划线→钻孔→锯割→锉削 D、划线→锯割→锉削→钻孔→锯割→锉削
(1)、图中漏标的尺寸共有( )A、2 处 B、3 处 C、4 处 D、5 处(2)、用大小合适的方形钢块加工该零件,最合理的加工流程为( )A、划线→锯割→锉削→划线→锯割→钻孔→锉削 B、划线→锯割→划线→钻孔→锯割→锉削 C、划线→锯割→锉削→划线→钻孔→锯割→锉削 D、划线→锯割→锉削→钻孔→锯割→锉削 -
11、如图所示是某形体的轴测图及其主视图和俯视图,则其正确的左视图是( )
 A、
A、 B、
B、 C、
C、 D、
D、
-
12、如图所示为一款无线蓝牙耳机,下列对耳机的设计分析和评价中,说法不正确的是( )
 A、该产品通过“RoHS”和“CE”两种认证,遵循了设计的技术规范原则 B、耳机价格低廉,体现了设计的经济原则 C、兼容市面上 99%的设备,主要考虑了“环境”的因素 D、体积小巧,携带方便,主要考虑了“人”的因素
A、该产品通过“RoHS”和“CE”两种认证,遵循了设计的技术规范原则 B、耳机价格低廉,体现了设计的经济原则 C、兼容市面上 99%的设备,主要考虑了“环境”的因素 D、体积小巧,携带方便,主要考虑了“人”的因素 -
13、学校教室平台更新了计算机设备,为了有效利用资源需要将替换下的一批显示器用于学生电子阅览室,但是这批显示器的原装支架均已遗失,小明发现显示器背面均有四个螺纹孔构成正方形(如图1所示),但不同显示器螺纹孔的间距并不统一。小明设计了如图2所示的支架,则根据题目要求,关于支架面板的设计,以下方案中最合理的是( )
 A、
A、 B、
B、 C、
C、 D、
D、
-
14、如图所示是一副眼镜,它的支撑部件主要有镜腿、镜框、鼻托等组成,是眼镜的构架。它的工作部件是镜片,由玻璃或者树脂构成。以下从人机关系角度说法不合理的是( )
 A、镜框的形状由圆形和方形等,主要考虑人的心理需求 B、镜腿和镜框采用折叠方式,便于携带,主要考虑了高效目标 C、镜架采用钛材料,电镀上色不易掉色,基本不会过敏,主要考虑了健康目标 D、镜片运用凹透镜原理,主要考虑信息的交互
A、镜框的形状由圆形和方形等,主要考虑人的心理需求 B、镜腿和镜框采用折叠方式,便于携带,主要考虑了高效目标 C、镜架采用钛材料,电镀上色不易掉色,基本不会过敏,主要考虑了健康目标 D、镜片运用凹透镜原理,主要考虑信息的交互 -
15、在设计时从人机关系角度需要考虑人体的最大宽度,以下不是从人体宽度角度考虑的是( )A、方向盘
 B、 CT检测仪器
B、 CT检测仪器  C、过道
C、过道  D、公共门
D、公共门 
-
16、如图所示为某品牌家教机,能实现直接在课本上的点、读、问、写、测等多种学习辅导形式,兼容市面主流在线学习app。从技术的角度分析,以下说法中不正确的是( )
 A、行业首次将人工智能科技和指尖定位技术用于学习领域,体现技术的创新性 B、该家教机能代替家长辅导孩子学习,省心省力,体现了技术发展人的作用 C、使用具有滤蓝光特性的CPU芯片,减少蓝光对眼睛的伤害,体现了技术保护人的作用 D、该家教机还具有距离提醒、家长管理等功能,体现了技术的目的性
A、行业首次将人工智能科技和指尖定位技术用于学习领域,体现技术的创新性 B、该家教机能代替家长辅导孩子学习,省心省力,体现了技术发展人的作用 C、使用具有滤蓝光特性的CPU芯片,减少蓝光对眼睛的伤害,体现了技术保护人的作用 D、该家教机还具有距离提醒、家长管理等功能,体现了技术的目的性 -
17、如图1 所示的置物架,由面板和三角支架组成,可安装在墙上。其中三角支架由横托杆、支撑杆和固定杆组成(横托杆、固定杆均为槽钢、支撑杆为扁钢),它们之间均用直径为5mm的销轴连接,主要尺寸如图2所示。使用过程中发现置物架不能折叠。请你对该三角支架进行改进,要求如下:

A. 置物架向上翻平牢固可靠(如图1),不用时能向下折叠(如图3);
B. 只能对横托杆进行改进设计,原横托杆外形如图4 所示;
C. 横托杆与固定杆始终保持连接,支撑杆和横托杆始终不分开;
D. 折叠和上翻操作方便,不需要使用工具。
请根据描述和设计要求完成以下任务:
(1)、①画出改进后横托杆的设计草图,必要时可用文字说明;②在设计草图上标注主要尺寸;
(2)、横托杆采用U 型钢材,是为了增加结构的(在A .强度;B .稳定性中选择合适的选项,将序号填写在横线处)(3)、为了保证三角支架与墙体之间有足够的连接强度,最合适的连接件是 (在下列选项中选择合适的选项,将序号填写在横线处);A、 B、
B、 C、
C、 D、
D、 (4)、制作横托杆时,一般不需要的工具是 (在A .钢直尺;B .手锯;C .钻头;D .丝锥;E .样冲中选择合适的选项,将序号填写在横线处)。
(4)、制作横托杆时,一般不需要的工具是 (在A .钢直尺;B .手锯;C .钻头;D .丝锥;E .样冲中选择合适的选项,将序号填写在横线处)。 -
18、如图是一种指纹考勤门禁系统,指纹考勤机识别员工指纹,与数据库中的指纹数据进行对比认证后,准确记录员工到岗以及离岗时间。通过电源控制器和电插锁能控制门的开和关。通过考勤软件,管理员可以对指纹记录和考勤记录等数据进行管理。回答以下问题:
 (1)、该系统安装以后,其正常的工作过程有如下几个环节:A .采集指纹建立信息库;B .开门;C .扫描指纹;D .数据对比确认;E .电源控制器打开电插锁。正确的工作流程是 → → → →B(将环节的序号填写在横线处)。(2)、研究这个控制系统时,将门认定为该系统的被控对象,则控制器的认定最合理的是(在A .电源控制器;B .指纹考勤机;C .计算机;D .出门按钮和电插锁中选择合适的序号填在横线处)。(3)、小明通过查询资料得知:市场上电锁有很多种类,一种称为“阳极锁”,另一种称为“阴极锁”,一般的阳极锁是断电开门型,阴极锁为通电开门型。根据以上信息可知,公共场所的消防通道安装电锁应选(在A .阳极锁;B .阴极锁中选择一项,将序号填写到横线处)。
(1)、该系统安装以后,其正常的工作过程有如下几个环节:A .采集指纹建立信息库;B .开门;C .扫描指纹;D .数据对比确认;E .电源控制器打开电插锁。正确的工作流程是 → → → →B(将环节的序号填写在横线处)。(2)、研究这个控制系统时,将门认定为该系统的被控对象,则控制器的认定最合理的是(在A .电源控制器;B .指纹考勤机;C .计算机;D .出门按钮和电插锁中选择合适的序号填在横线处)。(3)、小明通过查询资料得知:市场上电锁有很多种类,一种称为“阳极锁”,另一种称为“阴极锁”,一般的阳极锁是断电开门型,阴极锁为通电开门型。根据以上信息可知,公共场所的消防通道安装电锁应选(在A .阳极锁;B .阴极锁中选择一项,将序号填写到横线处)。 -
19、近年来,出现了一种“LED风扇”如图a 所示,旋转起来能显示静态或动态的文字图片。工作原理:利用扇叶上的LED 灯条转动、亮灭变化频率和人的视觉暂留现象。按下风扇按钮,单片机由程序来控制LED 的亮灭,转动的扇叶就会呈现出不同的图案。

注:视觉暂留现象是指,当人眼在观察景物时,视觉形象并不立即消失,人眼仍能继续保持其影像0.1 秒左右,视觉的这一现象则被称为“视觉暂留”。
(1)、风扇的显示控制手段为 , 控制方式为 (在A .手动;B .自动;C .开环控制;D .闭环控制中选择一项,将序号填写到横线处);(2)、电池电量不足时,风扇图案显示错乱,这体现了系统的(在A .整体性;B .相关性;C .环境适应性;D .目的性中选择一项,将序号填写到横线处);(3)、电风扇的转数每分钟至少需要转才能出现视觉暂留现象;(在A . 10;B . 60;C . 100;D . 600 中选择一项,将序号填写到横线处);(4)、如图b所示,“一”字符对应圆心角为36°,若风扇每分钟转1200圈,则要显示“一”字符,这个LED要点亮毫秒;(在A . 3;B . 4;C . 5;D . 6中选择一项,将序号填写到横线处)。 -
20、请补全三视图中所缺的三条图线。
