相关试卷
- 2026年1月浙江省普通高校招生选考科目考试通用技术试卷
- 浙江省浙南名校联盟2025-2026学年高二上学期期中联考技术试题-高中通用技术
- 浙江省桐乡市高级中学2025-2026学年高二上学期12月月考技术试题-高中通用技术
- 浙江省浙东北县域名校发展联盟(ZDB)2025-2026学年高三上学期11月联考技术试题-高中通用技术
- 浙江省宁波中学2025-2026学年高二上学期期中考试技术试卷(学考)-高中通用技术
- 浙江省金兰教育合作组织2025-2026学年高二上学期期中联考技术试卷-高中通用技术
- 浙江省丽水市五校高中发展共同体2025-2026学年高二上学期期中联考技术试题-高中通用技术
- 重庆市黔江实验中学2025-2026学年高三上学期期中通用技术试题
- 浙江省精诚联盟2025-2026学年高二上学期10月联考技术试题-高中通用技术
- 浙江省台州市部分学校2023-2024学年高二上学期学业水平期末考试技术试题-高中通用技术
-
1、下列关于指针式多用电表的说法不正确的是( )A、用欧姆档R×1K 测一光敏电阻时,用手遮挡光线后指针偏转角度应变大 B、采用不同档位测普通二极管的正向电阻时,测得的电阻值是不一样的 C、在进行直流电压或电流测量时,如果正负极接反,指针会反方向偏转 D、测量电阻时,电流从黑表笔流出多用电表,从红表笔流入多用电表
-
2、下列元器件中实物、 电路符号和功能描述均对应正确的是( )(注:B实物上刻有“PNP字样 ”)A、
 单向导电
B、
单向导电
B、 放大信号
C、
放大信号
C、 检测湿度
D、
检测湿度
D、 充放电
充放电
-
3、下列图示操作及描述不合理的是( )A、起锯时大拇指贴住锯条防滑移
B、扶正样冲,用铁锤敲击冲眼
C、套丝时先倒角,操作过程中要经常倒转
D、锉削面 A 时左手的施压要由大变小,右手的施压要由小变大

-
4、小晖需要将一块尺寸为 2440mm×1220mm×15mm 的胶合板锯割成 1200mm×290mm×15mm 的板块使用。除 木工铅笔外,还需要的工具组合是( )A、板锯、墨斗、3m 卷尺 B、板锯、墨斗、20cm 直尺 C、框锯、墨斗、30cm 直尺 D、框锯、30cm 直尺
-
5、下列抽屉侧板的连接方式中,最不牢固的是( )A、
 B、
B、 C、
C、 D、
D、
-
6、这款名为 ProjectHazel 的智能口罩,过滤等级符合 N95 医用标准,配备了可调 节气流大小的 SmartPod,内侧采用了硅胶完美贴合面部曲线,透明化的口罩设计, 可以让周围的人与佩戴者交流时看清其表情变化。下列关于该口罩的说法中,不恰当的是( )
 A、过滤等级符合 N95 医用标准,体现了技术保护人 B、可调节气流大小的设计,实现了人机关系的舒适目标 C、内侧采用硅胶完美贴合面部曲线,确保密闭性,符合设计的实用原则 D、可以让周围的人与佩戴者交流时看清其表情变化,考虑了信息的交互
A、过滤等级符合 N95 医用标准,体现了技术保护人 B、可调节气流大小的设计,实现了人机关系的舒适目标 C、内侧采用硅胶完美贴合面部曲线,确保密闭性,符合设计的实用原则 D、可以让周围的人与佩戴者交流时看清其表情变化,考虑了信息的交互 -
7、2023 年 9 月 23 日,第 19 届亚运会开幕式在杭州奥体中心举行。其上半部分由 8 片每个重达 160 吨左右的能旋转“花瓣 ”构成,能让“小莲花 ”顶部自由开合。通常“小莲花 ”都是处于盛开的状态,若遇如下雨下雪等,“小莲花 ”可闭合,“含苞待放 ”。此技术为全球首创。下列说法中,不恰当的是( )
 A、全球首创的屋顶开合技术,体现了技术的创新性 B、在解决体育馆屋顶开合问题的过程中,研发了多项技术,体现了技术的实践性 C、“花瓣 ”加固技术的内容和体系复杂,体现了技术的复杂性 D、设计中采用了 PTFE 膜材技术,体现了设计是技术的基础
A、全球首创的屋顶开合技术,体现了技术的创新性 B、在解决体育馆屋顶开合问题的过程中,研发了多项技术,体现了技术的实践性 C、“花瓣 ”加固技术的内容和体系复杂,体现了技术的复杂性 D、设计中采用了 PTFE 膜材技术,体现了设计是技术的基础 -
8、小明发现自己家的高脚杯(图 c)放在橱柜里特别占地方,拿取也不方便,他观察了一下厨房,发现厨房的吊柜离台面还有很大的距离(如图 a),酒杯可以倒挂在吊柜的底板(厚为15mm,如图 b)下面。请你构思该悬挂高脚酒杯的支架,设计要求如下:

(a)酒杯挂置在支架上稳定可靠,不易滑落,结构简单;
(b)一个支架至少能挂三个酒杯;
(c)不能在橱柜底板上钻孔和破坏底板;
(d)所需材料自选。请完成以下任务:
(1)、小明发现问题的途径是(单选)______;A、收集和分析信息 B、观察日常生活 C、技术试验和技术研究(2)、以下因素在设计时不需要考虑的是(多选)______;A、吊柜内部的空间大小 B、吊柜底板的厚度 C、高脚杯的高度 D、高脚杯的直径(3)、请根据小明确定的设计要求设计一个高脚杯支架,画出设计草图,必要时可用文字补充说明。(4)、在设计草图上标注主要的尺寸。 -
9、小明发现家里进门的过道比较窄,墙上安装的挂钩在搬运大件物品时容易发生碰撞,所以想进行更换。他在网上查询时,看到如图 a 所示的可折叠挂钩,于是灵机一动,打算参照这个挂钩,用环保木材和水性油漆,自己设计并制作一排钢琴挂钩(如图 b 所示),挂钩不用的时候可以向上收拢,避免人不小心碰到,轻轻一按就可实现展开和收拢,操作十分方便。请完成以下任务:
 (1)、小明该设计方案主要实现了哪些人机关系的目标(多选)_______;A、高效 B、安全 C、健康 D、舒适(2)、小明在设计分析时,考虑到过道狭窄而采用翻转方式,主要考虑的因素是(单选);
(1)、小明该设计方案主要实现了哪些人机关系的目标(多选)_______;A、高效 B、安全 C、健康 D、舒适(2)、小明在设计分析时,考虑到过道狭窄而采用翻转方式,主要考虑的因素是(单选);A. 环境 B. 人 C. 物
在设计该钢琴挂钩时,所采用的构思方法是(单选);
A. 形态分析法 B. 联想法 C. 设问法 D. 仿生法
(3)、以下哪个方案,适合小明该设计的挂钩部分(单选)_______;A、 B、
B、 C、
C、 (4)、小明打算从图 c 所示的大木板上,取下若干木条,用来制作该钢琴挂钩,以下规划方案最合理的是(单选)_______;A、
(4)、小明打算从图 c 所示的大木板上,取下若干木条,用来制作该钢琴挂钩,以下规划方案最合理的是(单选)_______;A、 B、
B、 C、
C、 D、
D、 (5)、小明在加工挂钩时,以下不.需.要.的工具是(单选)_______;A、
(5)、小明在加工挂钩时,以下不.需.要.的工具是(单选)_______;A、 B、
B、 C、
C、 D、
D、 (6)、小明制作完模型后,需要做一些试验,以下试验合理的是(多选)_______。A、将挂钩架安装在墙上,用手晃动架子,观察架子与墙面连接是否牢固。 B、将挂钩架从墙面上反复拆装,观察拆装是否方便。 C、在单个挂钩上挂上长大衣,观察挂钩的强度是否达到要求。 D、挂钩不挂物件情况下将其收拢,然后轻触挂钩,观察挂钩是否容易向外翻动。
(6)、小明制作完模型后,需要做一些试验,以下试验合理的是(多选)_______。A、将挂钩架安装在墙上,用手晃动架子,观察架子与墙面连接是否牢固。 B、将挂钩架从墙面上反复拆装,观察拆装是否方便。 C、在单个挂钩上挂上长大衣,观察挂钩的强度是否达到要求。 D、挂钩不挂物件情况下将其收拢,然后轻触挂钩,观察挂钩是否容易向外翻动。 -
10、小明在通用技术课上,设计了如图所示的零件,请根据题图完成第12-13题。
 (1)、图样中存在的错误共有( )A、1 处 B、2 处 C、3 处 D、4 处(2)、用大小合适的钢板加工该零件时,下列工具中选择合理的是( )
(1)、图样中存在的错误共有( )A、1 处 B、2 处 C、3 处 D、4 处(2)、用大小合适的钢板加工该零件时,下列工具中选择合理的是( )
-
11、哈佛大学学生杰西卡和同学通过反复研究、试验、改进,造出了世界上第一款自发电足球,在设计研发过程中做了很多模型,其中有一模型主要用于研究各种性能和人机关系,并用于试验,则这一模型为( )
 A、草模 B、结构模型 C、功能模型 D、展示模型
A、草模 B、结构模型 C、功能模型 D、展示模型 -
12、如图所示是某形体的主视图和左视图,相对应的俯视图是( )
 A、
A、 B、
B、 C、
C、 D、
D、
-
13、下列不属于技术图样的是( )A、
 B、
B、 C、
C、 D、
D、
-
14、如图 a 所示的榫卯结构,构件 1 的结构如图 b 所示,下列构件 2 的设计方案中正确的是( )
 A、
A、 B、
B、 C、
C、 D、
D、
-
15、下列工具的尺寸不是从人机关系考虑的是( )A、
 B、
B、 C、
C、 D、
D、
-
16、小明用五夹板制作了便携式小凳(图 a),随后进行了一系列的优化(图 b),下列说法错误的是( )
 A、采用“肩”形结构,使上板和下板都能得到“肩”形结构的支撑,主要增加了小凳的强度 B、凳脚两侧和下方挖成弧形,既减轻了凳子的质量、美化了外观,又增加了小凳对地面平整度的适应性 C、若在优化过程中,发现小凳的稳定性有问题,则需要返回到调查需求重新进行设计过程 D、完成后可以喷涂油漆,以提高小凳的美观度
A、采用“肩”形结构,使上板和下板都能得到“肩”形结构的支撑,主要增加了小凳的强度 B、凳脚两侧和下方挖成弧形,既减轻了凳子的质量、美化了外观,又增加了小凳对地面平整度的适应性 C、若在优化过程中,发现小凳的稳定性有问题,则需要返回到调查需求重新进行设计过程 D、完成后可以喷涂油漆,以提高小凳的美观度 -
17、杭州湾跨海大桥全长 36 公里。大桥地处钱塘江的喇叭口,如遇东风或东南风时,喇叭口将形成“窄管”效应——风力翻倍。如图所示,某实验室对杭州湾跨海工程海中平台及观光塔的抗风性能进行了风洞试验。这种试验方法属于( )
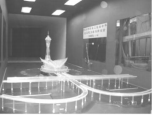 A、模拟试验法 B、强化试验法 C、虚拟试验法 D、优选试验法
A、模拟试验法 B、强化试验法 C、虚拟试验法 D、优选试验法 -
18、“大莲花”是2023年杭州亚运会的主场馆,采用28片大花瓣和27片小花瓣组成,花瓣材料选用铝镁锰板,板子上有一个个直径5毫米的小孔,不仅采光效果好,而且里面可以清晰看到外部风景而外面看不清里面,外面风沙尘进不来。同时由于莲花造型,场内的看台斜度可根据人体视线标准进行调整,已达到最佳观赛体验。“大莲花”设计了单独发光照明系统,灯光效果采取特制变光模式。请完成3-4题。
 (1)、从设计的一般原则分析,下列说法不正确的是( )A、主场馆设计充分运用水源热泵技术调节温度,达到节能低碳的目的,符合可持续发展原则 B、主场馆应用了智慧灯杆、5G 系统、可视化的运维平台等,符合创新原则 C、可举办大型综合运动会和赛事,设有更多观众坐席,符合实用原则 D、建筑主体由大花瓣和小花瓣组成,整个建筑为圆形,符合技术规范原则(2)、团队在设计期间,收集了相关信息之后,紧接着要做的是( )A、明确问题 B、设计分析 C、方案构思 D、制作模型
(1)、从设计的一般原则分析,下列说法不正确的是( )A、主场馆设计充分运用水源热泵技术调节温度,达到节能低碳的目的,符合可持续发展原则 B、主场馆应用了智慧灯杆、5G 系统、可视化的运维平台等,符合创新原则 C、可举办大型综合运动会和赛事,设有更多观众坐席,符合实用原则 D、建筑主体由大花瓣和小花瓣组成,整个建筑为圆形,符合技术规范原则(2)、团队在设计期间,收集了相关信息之后,紧接着要做的是( )A、明确问题 B、设计分析 C、方案构思 D、制作模型 -
19、如图所示是一款机械臂万向水龙头延伸器,能大角度 3D 旋转,满足多种生活用水需求。以下说法中正确的是( )
 A、集洗头、洗脸、漱口、冲洗面盆功能于一体,体现了技术的实用性 B、由于水龙头能旋转,在不断转动过程中连接处比普通水龙头更易损坏,体现了技术的复杂性 C、出水高度可调,洗头不必弯腰;向上可直接冲洗口腔,不用手持牙杯,体现了技术的目的性 D、该款水龙头可用在厨房,卫生间等很多场所,体现了技术的综合性
A、集洗头、洗脸、漱口、冲洗面盆功能于一体,体现了技术的实用性 B、由于水龙头能旋转,在不断转动过程中连接处比普通水龙头更易损坏,体现了技术的复杂性 C、出水高度可调,洗头不必弯腰;向上可直接冲洗口腔,不用手持牙杯,体现了技术的目的性 D、该款水龙头可用在厨房,卫生间等很多场所,体现了技术的综合性 -
20、杭州亚运会上首次运用机器狗在赛场搬运铁饼,机器狗能“待命-出击-运输”,代替铁饼员完成比赛搬运任务。下列说法中不恰当的是( )
 A、机器狗能代替工作人员搬运铁饼,体现了技术具有解放人的作用 B、机器狗的研发设计属于科学活动 C、机器狗采用了高实时性的操作系统,并自主开发一系列驱动程序,使信息的传输大大提速,体现了技术的创新性 D、经过数千次的测试和不断的技术优化,机器狗最终实现产品的落地应用,体现了技术的实践性
A、机器狗能代替工作人员搬运铁饼,体现了技术具有解放人的作用 B、机器狗的研发设计属于科学活动 C、机器狗采用了高实时性的操作系统,并自主开发一系列驱动程序,使信息的传输大大提速,体现了技术的创新性 D、经过数千次的测试和不断的技术优化,机器狗最终实现产品的落地应用,体现了技术的实践性