相关试卷
- 2026年1月浙江省普通高校招生选考科目考试通用技术试卷
- 浙江省浙南名校联盟2025-2026学年高二上学期期中联考技术试题-高中通用技术
- 浙江省桐乡市高级中学2025-2026学年高二上学期12月月考技术试题-高中通用技术
- 浙江省浙东北县域名校发展联盟(ZDB)2025-2026学年高三上学期11月联考技术试题-高中通用技术
- 浙江省宁波中学2025-2026学年高二上学期期中考试技术试卷(学考)-高中通用技术
- 浙江省金兰教育合作组织2025-2026学年高二上学期期中联考技术试卷-高中通用技术
- 浙江省丽水市五校高中发展共同体2025-2026学年高二上学期期中联考技术试题-高中通用技术
- 重庆市黔江实验中学2025-2026学年高三上学期期中通用技术试题
- 浙江省精诚联盟2025-2026学年高二上学期10月联考技术试题-高中通用技术
- 浙江省台州市部分学校2023-2024学年高二上学期学业水平期末考试技术试题-高中通用技术
-
1、如图所示是小斌在老师指导下设计的一款智能浇花控制系统示意图。当传感器检测到花盆土壤湿度低于设定下限值时,水泵抽取水箱中的水,对花盆浇水;当花盆土壤湿度达到设定的上限值时,断开水泵电源,停止浇水;为防止水箱缺水而水泵电机长时间空转烧毁,该系统还设置了电机保护子系统:当水箱水位过低时,自动切断水泵电源,保护电机。请根据示意图和描述,完成以下任务。
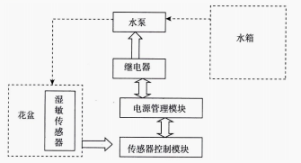 (1)、该系统的花盆土壤湿度和电机保护控制系统的控制方式分别属于和(均在“A .开环;B .闭环”中选择合适的选项,将序号填写在横线处)控制;(2)、该电机保护子系统的被控对象是(在“A .水泵电机;B .水箱;C .水箱的水位;D .土壤”中选择合适的选项,将序号填写在横线处);(3)、该电机保护子系统中的传感器最好选用;(在“A .磁敏传感器;B .湿度传感器;C .水位传感器”中选择合适的选项,将序号填写在横线处);(4)、小斌为了对系统进行环保优化,采用了静音水泵电机属于(在“A .影响因素;B .干扰因素;C .约束条件”中选择合适的选项,将序号填入横线处)。
(1)、该系统的花盆土壤湿度和电机保护控制系统的控制方式分别属于和(均在“A .开环;B .闭环”中选择合适的选项,将序号填写在横线处)控制;(2)、该电机保护子系统的被控对象是(在“A .水泵电机;B .水箱;C .水箱的水位;D .土壤”中选择合适的选项,将序号填写在横线处);(3)、该电机保护子系统中的传感器最好选用;(在“A .磁敏传感器;B .湿度传感器;C .水位传感器”中选择合适的选项,将序号填写在横线处);(4)、小斌为了对系统进行环保优化,采用了静音水泵电机属于(在“A .影响因素;B .干扰因素;C .约束条件”中选择合适的选项,将序号填入横线处)。 -
2、请仔细观察下图A字梯,根据你所学知识回答下列问题:
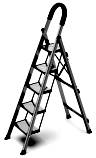 (1)、请问该图所示物体主要是什么结构?(2)、请简要说明该结构的特点。(3)、请至少列举出三个该结构在生活中的实际应用。
(1)、请问该图所示物体主要是什么结构?(2)、请简要说明该结构的特点。(3)、请至少列举出三个该结构在生活中的实际应用。 -
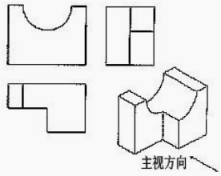
3、读图作图题根据轴测图,补全三视图中缺少的图线。
-
4、如图所示为一组合逻辑电路,其中A、B是信号输入端,M是控制信号端,F是输出端。下列关于电路的分析中不正确的是( )
 A、F输出的信号始终与M控制信号相反 B、当A、B输人低电平时,F输出低电平 C、当M输入低电平时,F的输出信号与B的输入信号一致 D、当M输人高电平时,F的输出信号与A的输入信号一致
A、F输出的信号始终与M控制信号相反 B、当A、B输人低电平时,F输出低电平 C、当M输入低电平时,F的输出信号与B的输入信号一致 D、当M输人高电平时,F的输出信号与A的输入信号一致 -
5、如图所示为电热水壶。其工作原理为,按下电源开关,发热底盘通电加热,当水沸腾时使感温元件的双金属片变形,断开电源;因电源开关断电后不可自动复位,故断电后水壶中的水不会自动再加热。用控制系统方框图表示电热水壶温度控制系统,则被控对象是( )
 A、电源开关 B、水壶和水 C、发热底盘 D、双金属片
A、电源开关 B、水壶和水 C、发热底盘 D、双金属片 -
6、如图所示汽车防撞预警系统是基于智能分析处理的汽车防撞预警系统,帮助司机与前方车辆保持安全距离。当与前车达到危险距离后,系统以声音警报的方式提醒司机有可能发生追尾碰撞,可有效提高行车安全及降低交通事故的发生,减少人员和经济损失。下列关于防撞预警系统的说法中,正确的是( )
 A、该系统属于闭环控制系统 B、被控对象是前方障碍物 C、雨雾天气是该控制系统的干扰因素 D、输入量是驾驶者的刹车动作
A、该系统属于闭环控制系统 B、被控对象是前方障碍物 C、雨雾天气是该控制系统的干扰因素 D、输入量是驾驶者的刹车动作 -
7、如图所示是一种风阻尼器,用于高层建筑应对台风。一个几百吨重的大铁球通过弹簧和液压装置安装在高层建筑物的中上部,当强风来袭时,该装置的传感器探测到建筑物的摇晃程度,通过计算机控制液压装置推动大铁球向反方向运动,从而降低建筑物的摇晃程度。若把大铁球作为被控对象,下列分析中不正确的是( )
 A、输入量是建筑物的摇晃程度 B、控制量是风力的大小 C、控制器是计算机 D、输出量是大铁球的运动方向和速度
A、输入量是建筑物的摇晃程度 B、控制量是风力的大小 C、控制器是计算机 D、输出量是大铁球的运动方向和速度 -
8、如图所示为高速公路区间测速系统示意图。区间测速的原理是:通过在同一路段两端的监控点分别架设摄像机,对通行的车辆进行两次实时监控、抓拍,获取数据,由后台数据中心判断该车是否超速。下列关于高速公路区间测速系统的分析中,正确的是:( )
 A、该系统即使是在恶劣天气条件下也能正常工作,体现了系统的环境适应性 B、系统能精确地计算出通行车辆是否超速,体现了系统分析的科学性原则 C、传感器的精度影响着系统的正常工作,体现了系统的相关性 D、该系统能实时监测通行车辆的速度,体现了系统的动态性
A、该系统即使是在恶劣天气条件下也能正常工作,体现了系统的环境适应性 B、系统能精确地计算出通行车辆是否超速,体现了系统分析的科学性原则 C、传感器的精度影响着系统的正常工作,体现了系统的相关性 D、该系统能实时监测通行车辆的速度,体现了系统的动态性 -
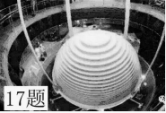
9、中国向世界宣布,被誉为“中国天眼”的500米口径球面射电望远镜(FAST)2021年4月1日起将正式对全球科学界开放。它是世界最大单口径、最灵敏的球面射电望远镜,它由主动反射面系统、馈源支撑系统、测量与控制系统、接收机与终端及观测基地等几大部分构成。以下分析不恰当的是( )
 A、可探测银河系结构、超大质量黑洞等太空奥秘,体现系统的目的性 B、假如要优化该系统,雷电属于系统优化的影响因素 C、设计该系统时既要考虑射电探测功能足够强,又要考虑成本及工艺可行性,体现系统分析的综合性原则 D、主动反射面系统、馈源支撑系统、测量与控制系统、接收机与终端及观测基地等都是该望远镜的子系统
A、可探测银河系结构、超大质量黑洞等太空奥秘,体现系统的目的性 B、假如要优化该系统,雷电属于系统优化的影响因素 C、设计该系统时既要考虑射电探测功能足够强,又要考虑成本及工艺可行性,体现系统分析的综合性原则 D、主动反射面系统、馈源支撑系统、测量与控制系统、接收机与终端及观测基地等都是该望远镜的子系统 -
10、如图所示,图甲是传统水银温度计测体温流程,图乙为电子耳温计测体温流程,根据给出资料判断下列有关流程的说法中不正确的是( )
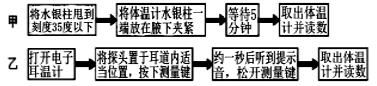 A、电子耳温计的使用,为优化测量体温的流程创造了条件 B、甲乙流程的时序都不可颠倒 C、用电子耳温计后,测温流程总时间明显缩短 D、甲乙流程都有四个环节,所以乙流程没有实现对甲流程的工期优化
A、电子耳温计的使用,为优化测量体温的流程创造了条件 B、甲乙流程的时序都不可颠倒 C、用电子耳温计后,测温流程总时间明显缩短 D、甲乙流程都有四个环节,所以乙流程没有实现对甲流程的工期优化 -
11、如图所示是某垃圾焚烧发电厂的工艺流程图。下列关于该垃圾焚烧发电流程的分析不正确的是( )
 A、该工艺流程的设计既考虑了垃圾的综合利用又考虑了环境保护 B、“烟气净化处理”与“飞灰稳定化处理”是并行工序 C、垃圾池可以沉淀渗沥液,减少垃圾焚烧后产生的有害气体,提高垃圾燃烧热值 D、垃圾焚烧后产生的烟气经过处理后再排放,可以减少对大气的污染
A、该工艺流程的设计既考虑了垃圾的综合利用又考虑了环境保护 B、“烟气净化处理”与“飞灰稳定化处理”是并行工序 C、垃圾池可以沉淀渗沥液,减少垃圾焚烧后产生的有害气体,提高垃圾燃烧热值 D、垃圾焚烧后产生的烟气经过处理后再排放,可以减少对大气的污染 -
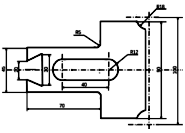
12、如右图所示的健身器材,它的支柱和扶手都是由中空的钢管做成的,使用者可双手握住扶手,双脚站在踏板上进行跑步运动。请根据以上介绍完成两题。
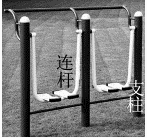 (1)、当使用者站在踏板上不运动时,连杆的主要受力形式为( )。A、受扭转力、弯曲力 B、受压力、扭转力 C、受压力、弯曲力 D、受拉力、弯曲力(2)、该健身器材的支柱属于( )。A、壳体结构 B、框架结构 C、实体结构 D、组合结构
(1)、当使用者站在踏板上不运动时,连杆的主要受力形式为( )。A、受扭转力、弯曲力 B、受压力、扭转力 C、受压力、弯曲力 D、受拉力、弯曲力(2)、该健身器材的支柱属于( )。A、壳体结构 B、框架结构 C、实体结构 D、组合结构 -
13、如图所示是一款新型无线电子秤及其评价坐标图,显示器可以手持,也可以固定在秤上,以下对坐标图的分析中恰当的是( )
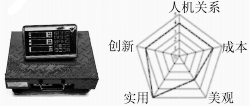 A、该产品的成本大大高于同类产品 B、该产品便于读数,实用性好 C、该产品非常美观. D、坐标图评价的依据是设计的一般原则
A、该产品的成本大大高于同类产品 B、该产品便于读数,实用性好 C、该产品非常美观. D、坐标图评价的依据是设计的一般原则 -
14、一段圆钢要加工成如图所示的连接件,在手工加工过程中,不可能用到的工具是( )
 A、丝锥 B、钢锯 C、凿子 D、板牙
A、丝锥 B、钢锯 C、凿子 D、板牙 -
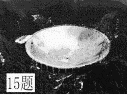
15、通用技术课上,小明设计了如图所示的零件(厚度为5mm)。用厚度为5mm的钢板制作该零件,下列说法中不合理的是( )
 A、加工流程可以为:划线→冲眼→钻孔→锯割→锉削 B、锯割操作时可以带手套 C、钻孔时可加冷却液 D、锉削操作时只需用到平锉和圆锉
A、加工流程可以为:划线→冲眼→钻孔→锯割→锉削 B、锯割操作时可以带手套 C、钻孔时可加冷却液 D、锉削操作时只需用到平锉和圆锉 -
16、如图所示为一款安全箱,以下设计分析中,主要从“物”的角度考虑的是( )。
 A、外壳采用聚丙烯异分子的工程塑料,强度高、重量轻 B、锁扣设计不夹手、好打开、易锁紧 C、内部有多层空间,方便分类放置物品 D、使用地方广,可以有效防止潮气、水,甚至空气进入。
A、外壳采用聚丙烯异分子的工程塑料,强度高、重量轻 B、锁扣设计不夹手、好打开、易锁紧 C、内部有多层空间,方便分类放置物品 D、使用地方广,可以有效防止潮气、水,甚至空气进入。 -
17、如图所示是已展开的嫦娥五号国旗展示系统,由月面国旗、压紧释放装置、展开机构三部分组成,折叠后为长约半米,重1kg的盒子。国旗材料为耐极端环境条件的国产高性能芳纶纤维,采用复合纺纱技术制作而成;采用卷轴形式展开,确保国旗平整;机构支架由2根扭簧提供展开的动力,支架与国旗卷轴同步展开,一秒内完成一系列步骤。科研团队花费超过一年的时间,挑选出30多种纤维材料,通过做热匹配性,耐高低温、防静电、防月球尘埃等试验,经数理统计分析,选用芳纶纤维为主要材料。这种选择材料的试验方法属于( )
 A、移植试验法 B、虚拟试验法 C、强化试验法 D、优选试验法
A、移植试验法 B、虚拟试验法 C、强化试验法 D、优选试验法 -
18、如图所示的尺寸标注错误的是( )
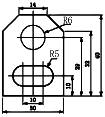 A、R6的标注 B、R5的标注 C、40的标注 D、30的标注
A、R6的标注 B、R5的标注 C、40的标注 D、30的标注 -
19、某小组为贫困山区学生设计了一款便携式台灯,以下是该小组在设计中的一部分工作步骤,请你按设计的一般过程进行排序( )
①进行设计分析,画出台灯的草图
②收集与研发台灯相关的专利、标准等资料,通过问卷调查对目标用户进行需求调查,确定研发方向
③在多种方案中选定方案,画出台灯的加工图
④制作台灯模型并进行相关测试
A、①②③④ B、②①③④ C、①②④③ D、②①④③ -
20、张斌同学在进行技术课题设计过程中,没有对选用的材料进行技术试验,而是直接使用,导致设计产品的测试失败。由此可以得出( )A、技术试验会浪费设计的时间 B、技术试验是设计过程的一个重要环节 C、只需对模型或原型进行技术试验 D、设计过程无需技术试验