2026年高考物理二轮复习命题热点情境1生产实践类情境专项训练
试卷更新日期:2026-04-14 类型:二轮复习
一、选择题
-
1. 智能机器人已经广泛应用于宾馆、医院等服务行业,用于给客人送餐、导引等服务,深受广大消费者喜爱。如图甲所示的医用智能机器人沿医院走廊运动,图乙是该机器人在某段时间内的位移—时间图像,则机器人( )
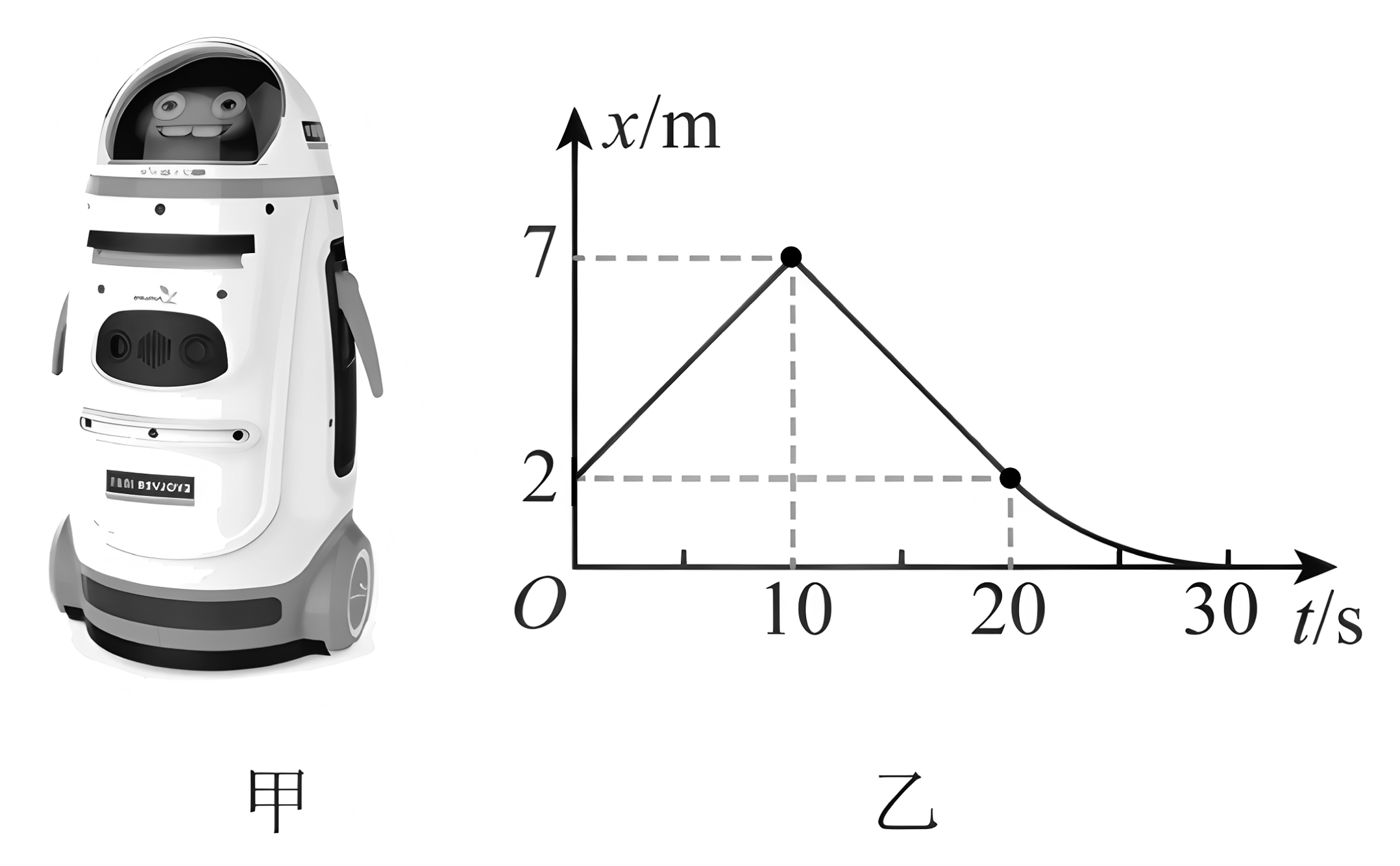 A、在0~30s内的位移是2m B、在0~10s内做匀加速直线运动 C、在20~30s内,运动轨迹为曲线 D、在10~30s内,平均速度大小为0.35m/s2. 扫地机器人是智能家用电器的一种,它利用自身携带的小型吸尘部件进行吸尘清扫,如图表所示为某款扫地机器人的铭牌标有的数据,则该扫地机器人( )
A、在0~30s内的位移是2m B、在0~10s内做匀加速直线运动 C、在20~30s内,运动轨迹为曲线 D、在10~30s内,平均速度大小为0.35m/s2. 扫地机器人是智能家用电器的一种,它利用自身携带的小型吸尘部件进行吸尘清扫,如图表所示为某款扫地机器人的铭牌标有的数据,则该扫地机器人( )电机基本参数
产品尺寸
280mm×280m×75mm
电池
5000mA·h锂电池
质量
0.65kg
无线连接
WiFi智能快连
工作额定电压
20V
工作额定功率
40W
 A、工作额定电流为1A B、电池充满电后储存的总电荷量为5000C C、以额定电压工作时,电机的内阻为10Ω D、以额定功率工作时,每分钟消耗电能为2400J3. 11月11日浙江杭州正式启用多条无人机物流配送航线,开启基于无人机公共起降场的城市低空配送新模式。下面是无人机在直线运输过程中记录的4次运动图像,反映无人机在0~4s内的平均速度最大的是( )A、
A、工作额定电流为1A B、电池充满电后储存的总电荷量为5000C C、以额定电压工作时,电机的内阻为10Ω D、以额定功率工作时,每分钟消耗电能为2400J3. 11月11日浙江杭州正式启用多条无人机物流配送航线,开启基于无人机公共起降场的城市低空配送新模式。下面是无人机在直线运输过程中记录的4次运动图像,反映无人机在0~4s内的平均速度最大的是( )A、 B、
B、 C、
C、 D、
D、 4. 现代生产生活中常用无人机运送物品,如图所示,无人机携带质量为m的匀质钢管在无风的空中悬停,轻绳M端和N端系住钢管,轻绳中点O通过缆绳与无人机连接。MO、NO与竖直方向的夹角均为60°,钢管水平。则MO的弹力大小为( )(重力加速度为g)
4. 现代生产生活中常用无人机运送物品,如图所示,无人机携带质量为m的匀质钢管在无风的空中悬停,轻绳M端和N端系住钢管,轻绳中点O通过缆绳与无人机连接。MO、NO与竖直方向的夹角均为60°,钢管水平。则MO的弹力大小为( )(重力加速度为g)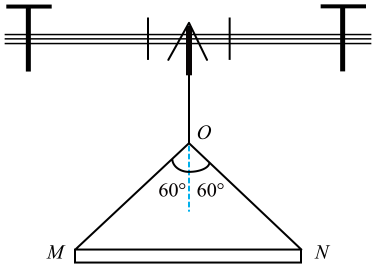 A、2mg B、mg C、 D、5. 某智能锁利用超级电容器作为备用电源,其简化电路如图所示。主电源正常工作时(开关S闭合),智能锁的输入电压为6 V;当主电源断电(开关S断开),则启用备用电源,智能锁在输入电压降至4.5 V时会发出低电压警报。该电容器的电容为1 F,R1及R2是电路中的小电阻,下列说法正确的是( )
A、2mg B、mg C、 D、5. 某智能锁利用超级电容器作为备用电源,其简化电路如图所示。主电源正常工作时(开关S闭合),智能锁的输入电压为6 V;当主电源断电(开关S断开),则启用备用电源,智能锁在输入电压降至4.5 V时会发出低电压警报。该电容器的电容为1 F,R1及R2是电路中的小电阻,下列说法正确的是( ) A、正常工作时,电容器储存电荷量为6 C B、断电前后,流经智能锁的电流方向相反 C、R2阻值越大,当主电源断电后,电容器放电时间一定越短 D、从主电源断电后至智能锁发出低电压警报,流经智能锁的电荷量为1.5 C6. 2024年底,世界装机容量最大的抽水蓄能电站——河北丰宁抽水蓄能电站全面投产发电。如图,若该电站通过理想变压器调节输出电压时,输入电压保持不变。已知副线圈总匝数为n,分接头间和间的线圈匝数 , 开关S接3时输出电压的瞬时值 , 则S接2时的图像为( )
A、正常工作时,电容器储存电荷量为6 C B、断电前后,流经智能锁的电流方向相反 C、R2阻值越大,当主电源断电后,电容器放电时间一定越短 D、从主电源断电后至智能锁发出低电压警报,流经智能锁的电荷量为1.5 C6. 2024年底,世界装机容量最大的抽水蓄能电站——河北丰宁抽水蓄能电站全面投产发电。如图,若该电站通过理想变压器调节输出电压时,输入电压保持不变。已知副线圈总匝数为n,分接头间和间的线圈匝数 , 开关S接3时输出电压的瞬时值 , 则S接2时的图像为( ) A、
A、 B、
B、 C、
C、 D、
D、 7. 我国航天员要在天宫二号航天器实验舱的桌面上测量物体的质量,可采用的方法如下:质量为的待测物A的前后连接有质量均为的两个力传感器,在某一恒定外力F作用下在桌面上一起运动,如图所示,稳定后待测物A前、后两个传感器的读数分别为、 , 由此可知待测物体A的质量为( )
7. 我国航天员要在天宫二号航天器实验舱的桌面上测量物体的质量,可采用的方法如下:质量为的待测物A的前后连接有质量均为的两个力传感器,在某一恒定外力F作用下在桌面上一起运动,如图所示,稳定后待测物A前、后两个传感器的读数分别为、 , 由此可知待测物体A的质量为( ) A、 B、 C、 D、
A、 B、 C、 D、二、多项选择题
-
8. 酒店送餐机器人,在酒店内自主导航将物品配送到指定房间。已知机器人的质量为80kg,机器人在瓷砖路面上由静止以恒定加速度运行1s,之后保持输出功率恒定做直线运动,某一时刻走到了酒店的地毯上继续前行。机器人内置速度测量仪,可记录机器人运动的v-t图像如图所示, , 则( )
 A、送餐机器人的输出功率为40W B、送餐机器人在酒店地毯上所受阻力为40N C、送餐机器人在地毯上相较于瓷砖上,通过相同的距离更为省电 D、送餐机器人从10s到18s时间内所通过的位移大小为4.375m9. “新智AI,赋能未来”2025人工智能驱动创新发展大会暨科技成果展举办,分拣机器人能够自主规划路线,确保高效、准确的分拣作业。如图所示,机器人从A处由静止出发沿两段直线路径AB、BC运动到C处停下,再将货物从托盘卸到分拣口。已知机器人最大运行速率 , 机器人加速或减速运动时的加速度大小均为 , AB距离 , BC距离 , 机器人途经B处时的速率为零,要求机器人能在最短时间内到达分拣口。下列说法正确的是( )
A、送餐机器人的输出功率为40W B、送餐机器人在酒店地毯上所受阻力为40N C、送餐机器人在地毯上相较于瓷砖上,通过相同的距离更为省电 D、送餐机器人从10s到18s时间内所通过的位移大小为4.375m9. “新智AI,赋能未来”2025人工智能驱动创新发展大会暨科技成果展举办,分拣机器人能够自主规划路线,确保高效、准确的分拣作业。如图所示,机器人从A处由静止出发沿两段直线路径AB、BC运动到C处停下,再将货物从托盘卸到分拣口。已知机器人最大运行速率 , 机器人加速或减速运动时的加速度大小均为 , AB距离 , BC距离 , 机器人途经B处时的速率为零,要求机器人能在最短时间内到达分拣口。下列说法正确的是( ) A、机器人从A到B过程中,从静止加速到最大运行速率所需时间 B、机器人从A运动到B的时间 C、机器人从B运动到C时间 D、机器人从B运动到C的平均速度大小10. 如图所示,某机场进行“行李传送车”传送行李培训.工作人员先将传送带调整水平,再接通电源让传送带做匀速直线运动,然后将某行李箱轻放在传送带一端.若行李箱先做匀加速运动再随传送带一起匀速运动,则在行李箱被传送的整个过程中,下列说法正确的是( )
A、机器人从A到B过程中,从静止加速到最大运行速率所需时间 B、机器人从A运动到B的时间 C、机器人从B运动到C时间 D、机器人从B运动到C的平均速度大小10. 如图所示,某机场进行“行李传送车”传送行李培训.工作人员先将传送带调整水平,再接通电源让传送带做匀速直线运动,然后将某行李箱轻放在传送带一端.若行李箱先做匀加速运动再随传送带一起匀速运动,则在行李箱被传送的整个过程中,下列说法正确的是( ) A、传送带对行李箱始终有摩擦力作用 B、传送相同材质的物品,质量越大加速的时间越长 C、仅减小传送带速度,行李箱加速运动的时间变短 D、仅增大传送带速度,行李箱与传送带的相对位移变大
A、传送带对行李箱始终有摩擦力作用 B、传送相同材质的物品,质量越大加速的时间越长 C、仅减小传送带速度,行李箱加速运动的时间变短 D、仅增大传送带速度,行李箱与传送带的相对位移变大三、非选择题
-
11. 智能化育苗蔬菜基地对环境要求严格,其中包括对光照强度的调控,光照强度简称照度 , 反映光照的强弱,光越强,照度越大,单位为勒克斯(lx)。为了控制照度,科技人员设计了图甲所示的智能光控电路。
智能光控电路的核心元件是光敏电阻 , 某同学用如图乙所示电路测量光敏电阻在不同照度时的阻值,实验所用器材:电源 , 滑动变阻器(最大阻值为),电压表(量程为 , 内阻为),毫安表(量程为 , 内阻不计),定值电阻 , 开关和导线若干。
 (1)、在闭合开关前,应把的滑片移到(选填“左”或“右”)端;(2)、某次测量时电压表的示数如图丙所示,电压表的读数为V,电流表读数为 , 此时光敏电阻的阻值为Ω;(3)、该同学通过测量得到了6组数据,他作出光敏电阻的阻值随照度变化的图像如图丁所示,由图丁可初步判断光敏电阻的阻值与照度反比例函数关系(选填“满足”或“不满足");
(1)、在闭合开关前,应把的滑片移到(选填“左”或“右”)端;(2)、某次测量时电压表的示数如图丙所示,电压表的读数为V,电流表读数为 , 此时光敏电阻的阻值为Ω;(3)、该同学通过测量得到了6组数据,他作出光敏电阻的阻值随照度变化的图像如图丁所示,由图丁可初步判断光敏电阻的阻值与照度反比例函数关系(选填“满足”或“不满足"); (4)、该同学用上述光敏电阻接入图甲所示的电路,其中电源电动势 , 内阻忽略不计,电阻 , 电阻箱的阻值调节范围是 , 光敏电阻的电压增加到时光照系统开始工作,为了使照度降低到4klx时,自动控制系统开始补光,则的阻值应该调节为:(5)、要加快蔬菜的生长,适度提高光照时间,可调节的方法是。12. 近年来,中国机器人市场呈现飞跃式发展,成为全球最大的工业机器人市场,也已应用到国内各个行业中。一餐厅推出了一款智能送餐机器人进行送餐(如图甲)。该款机器人的参数如下:
(4)、该同学用上述光敏电阻接入图甲所示的电路,其中电源电动势 , 内阻忽略不计,电阻 , 电阻箱的阻值调节范围是 , 光敏电阻的电压增加到时光照系统开始工作,为了使照度降低到4klx时,自动控制系统开始补光,则的阻值应该调节为:(5)、要加快蔬菜的生长,适度提高光照时间,可调节的方法是。12. 近年来,中国机器人市场呈现飞跃式发展,成为全球最大的工业机器人市场,也已应用到国内各个行业中。一餐厅推出了一款智能送餐机器人进行送餐(如图甲)。该款机器人的参数如下:质量m=18kg,提供的最大牵引力F=60N(不提供阻力),与地面间的滑动摩擦因数μ1=0.1,最大运行速度为v=2m/s。要求:送餐过程托盘保持水平,菜碟与托盘不发生相对滑动,机器人到达餐桌时以及返回O处速度都刚好为0。现把送餐过程简化为如图乙的直线情境图:已知静止的机器人在O处出发,O与餐桌A相距x0=6m,机器人、餐桌均可看成质点,送餐使用的菜碟与托盘之间的动摩擦因数为μ2=0.16,托盘的质量为m1=2kg(与机器人固定),菜碟含菜的质量为m2=2.5kg,最大静摩擦力等于滑动摩擦力,重力加速度g取10m/s2。
 (1)、若机器人以a1=1.2m/s2的加速度送餐,求菜碟所受的摩擦力大小。(2)、若机器人以满足条件的最大加速度送餐,求该加速度a2的大小。(3)、若机器人送餐后,欲以最短的时间返回O处,求该次返回的时间。13. 在北京冬奥会期间,“送餐机器人”格外引人关注。已知机器人匀速运动时的最大速度 , 加速和减速阶段都做匀变速直线运动,加速度大小均为。若机器人为某楼层房间的运动员配送午餐,送餐过程餐盘和食物与机器人保持相对静止。
(1)、若机器人以a1=1.2m/s2的加速度送餐,求菜碟所受的摩擦力大小。(2)、若机器人以满足条件的最大加速度送餐,求该加速度a2的大小。(3)、若机器人送餐后,欲以最短的时间返回O处,求该次返回的时间。13. 在北京冬奥会期间,“送餐机器人”格外引人关注。已知机器人匀速运动时的最大速度 , 加速和减速阶段都做匀变速直线运动,加速度大小均为。若机器人为某楼层房间的运动员配送午餐,送餐过程餐盘和食物与机器人保持相对静止。(1)机器人由静止开始匀加速至最大速度的过程中,总质量的餐盘和食物受到的合外力冲量I的大小;
(2)机器人具有“防撞制动”功能,匀速直线运动的机器人从探测到正前方障碍物到开始制动的时间 , 求探测到正前方的障碍物至停止运动,机器人前进的最大距离;
(3)机器人从一个房门静止出发沿直线到下一个房门停止运动,位移大小为4m,求该过程运动的最短时间。
 14. 快递物流已经深入我们的生活,准确迅速分拣是一个重要环节,图1是快递分拣传送装置。它由两台传送机组成,一台水平传送,另一台倾斜传送,图2是该装置示意图,CD部分倾角 , B、C间距离忽略不计。已知水平传送带以的速率顺时针转动。把一个可视为质点的货物无初速度放在A端,图3为水平传送带AB段数控设备记录的物体的运动图像,时刚好达到B端,且速率不变滑上C端,已知两段传送带的摩擦因数相同。g取。求:
14. 快递物流已经深入我们的生活,准确迅速分拣是一个重要环节,图1是快递分拣传送装置。它由两台传送机组成,一台水平传送,另一台倾斜传送,图2是该装置示意图,CD部分倾角 , B、C间距离忽略不计。已知水平传送带以的速率顺时针转动。把一个可视为质点的货物无初速度放在A端,图3为水平传送带AB段数控设备记录的物体的运动图像,时刚好达到B端,且速率不变滑上C端,已知两段传送带的摩擦因数相同。g取。求:(1)水平传送带AB的长度及滑动摩擦因数;
(2)若CD段的长度为米,则CD部分传送带速度至少为多少,快递员才能在D端取到快件。
 15. 智能机器人自动分拣快递包裹系统被赋予“惊艳世界的中国黑科技”称号。分拣机器人工作效率高,落袋准确率达99.9%。在供包台工作人员将包裹放在机器人的水平托盘上,智能扫码读取包裹目的地信息,经过大数据分析后生成最优路线,包裹自动送至方形分拣口。如图甲,当机器人抵达分拣口时,速度恰好减速为零,翻转托盘使托盘倾角缓慢增大,直至包裹滑下,将包裹投入分拣口中(最大静摩擦力近似等于滑动摩擦力,重力加速度g大小取)。如图乙,机器人A把质量的包裹从供包台沿直线运至相距的分拣口处,在运行过程中包裹与水平托盘保持相对静止。已知机器人A运行最大加速度 , 运行最大速度 , 机器人运送包裹途中,看作质点。
15. 智能机器人自动分拣快递包裹系统被赋予“惊艳世界的中国黑科技”称号。分拣机器人工作效率高,落袋准确率达99.9%。在供包台工作人员将包裹放在机器人的水平托盘上,智能扫码读取包裹目的地信息,经过大数据分析后生成最优路线,包裹自动送至方形分拣口。如图甲,当机器人抵达分拣口时,速度恰好减速为零,翻转托盘使托盘倾角缓慢增大,直至包裹滑下,将包裹投入分拣口中(最大静摩擦力近似等于滑动摩擦力,重力加速度g大小取)。如图乙,机器人A把质量的包裹从供包台沿直线运至相距的分拣口处,在运行过程中包裹与水平托盘保持相对静止。已知机器人A运行最大加速度 , 运行最大速度 , 机器人运送包裹途中,看作质点。(1)求机器人A从供包台运行至分拣口所需的最短时间t;
(2)若包裹与水平托盘的动摩擦因数为 , 则在机器人A到达投递口处,要使得包裹刚开始下滑,托盘的最小倾角应该是多少;
(3)机器人A投递完包裹后返回供包台途中发生故障,机器人A立刻制动,制动时速度为3m/s,由于惯性,机器人A在地面滑行4.5m后停下来,此时刚好有另一机器人B,以最大速度碰撞3m/s与机器人A发生弹性正碰,碰撞后机器人A滑行了2m停下来(其加速度与制动后滑行加速度相等,机器人A、B均看作质点)。则机器人B的总质量是机器人A的多少倍?
