浙江省浙南名校联盟2024-2025学年高二下学期期末联考技术试题-高中通用技术
试卷更新日期:2025-07-09 类型:期末考试
一、选择题(本大题共12小题,每小题2分,共24分。每小题列出的四个备选项中只有一个是符合题目要求的,不选、多选、错选均不得分)
-
1. 如图所示是某款智能AR眼镜,可以实现AI识物、拍照答题、多语种翻译、实时导航等多种功能,还支持声纹安全支付。请根据描述完成以下小题。
 (1)、下列关于该智能AR眼镜的说法中,不正确的是( )A、提供深度AIGC音频防伪技术、软硬件结合的联合防控体系等多项安全保障,保障用户在声纹支付过程中的资金安全,体现了技术保护人 B、AI技术使智能AR眼镜的设计得以实现 C、根据用户的体验和需求,不断试验改进,体现了技术的实践性 D、用户通过点头摇头等动作即可触发指令,体现了设计的实用原则(2)、下列关于该眼镜的分析与评价中不恰当的是( )A、该眼镜结构根据人体工学研发,在材质选择上以轻便的高品质材料为主,主要考虑了人的因素 B、该眼镜配有充电眼镜盒,20分钟即可充满电,实现了人机关系的高效目标 C、双击镜腿即可接听电话,满足了普通人群的需求 D、两镜脚间距设计,主要考虑了人的静态尺寸2. 下列操作中不符合操作要领的是( )A、
(1)、下列关于该智能AR眼镜的说法中,不正确的是( )A、提供深度AIGC音频防伪技术、软硬件结合的联合防控体系等多项安全保障,保障用户在声纹支付过程中的资金安全,体现了技术保护人 B、AI技术使智能AR眼镜的设计得以实现 C、根据用户的体验和需求,不断试验改进,体现了技术的实践性 D、用户通过点头摇头等动作即可触发指令,体现了设计的实用原则(2)、下列关于该眼镜的分析与评价中不恰当的是( )A、该眼镜结构根据人体工学研发,在材质选择上以轻便的高品质材料为主,主要考虑了人的因素 B、该眼镜配有充电眼镜盒,20分钟即可充满电,实现了人机关系的高效目标 C、双击镜腿即可接听电话,满足了普通人群的需求 D、两镜脚间距设计,主要考虑了人的静态尺寸2. 下列操作中不符合操作要领的是( )A、 B、
B、 C、
C、 D、
D、 3. 如图a所示是小通设计的木质小凳,小凳由图b所示的构件构成。现需要在两侧板之间增加一根横杆,以增加其稳固性。下列结构设计和材料规划合理的是( )
3. 如图a所示是小通设计的木质小凳,小凳由图b所示的构件构成。现需要在两侧板之间增加一根横杆,以增加其稳固性。下列结构设计和材料规划合理的是( )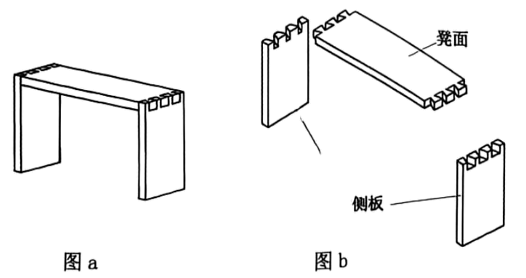 A、
A、 B、
B、 C、
C、 D、
D、 4. 如图所示是某形体的主视图和俯视图,相对应的左视图是( )
4. 如图所示是某形体的主视图和俯视图,相对应的左视图是( )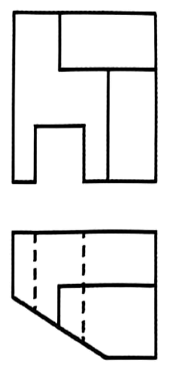 A、
A、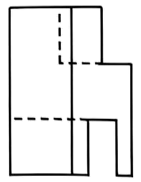 B、
B、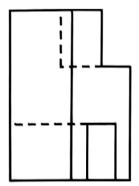 C、
C、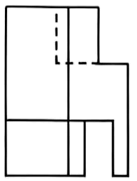 D、
D、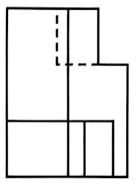 5. 如图是一种新型液压千斤顶,液压杆竖直方向伸缩时,通过连杆从而升降顶片,起到升降重物的作用。液压杆伸长过程中,下列对该结构的分析不正确的是( )
5. 如图是一种新型液压千斤顶,液压杆竖直方向伸缩时,通过连杆从而升降顶片,起到升降重物的作用。液压杆伸长过程中,下列对该结构的分析不正确的是( )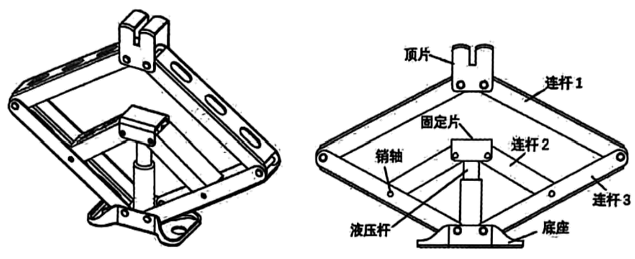 A、顶片向上移动 B、连杆1受拉 C、连杆2受拉 D、采用蝶形底座稳定性强6. 如图所示是小通设计的手机支架,他准备在通用技术实践教室用大小合适的钢板制作构件1,下列操作合理的是( )
A、顶片向上移动 B、连杆1受拉 C、连杆2受拉 D、采用蝶形底座稳定性强6. 如图所示是小通设计的手机支架,他准备在通用技术实践教室用大小合适的钢板制作构件1,下列操作合理的是( ) A、先划基准线,然后划轮廓线,最后划尺寸线 B、锯割加工时,需要留出一定的余量,且不能加润滑液 C、钻孔时应先装夹钻头,再安装工件 D、加工流程可以为:划线→锯割→钻孔→锉削→弯折7. 如图所示为工业上常采用的熔化极氩弧焊枪,其工作过程:当移动焊枪焊接时,检测装置自动采集焊枪移动的速度及距离,将信号传给控制装置控制送丝滚轮、供气及供电装置运作,使焊枪的喷嘴根据移动速度喷射出熔滴,达到均匀焊接的作用。请根据示意图和描述完成以下小题。
A、先划基准线,然后划轮廓线,最后划尺寸线 B、锯割加工时,需要留出一定的余量,且不能加润滑液 C、钻孔时应先装夹钻头,再安装工件 D、加工流程可以为:划线→锯割→钻孔→锉削→弯折7. 如图所示为工业上常采用的熔化极氩弧焊枪,其工作过程:当移动焊枪焊接时,检测装置自动采集焊枪移动的速度及距离,将信号传给控制装置控制送丝滚轮、供气及供电装置运作,使焊枪的喷嘴根据移动速度喷射出熔滴,达到均匀焊接的作用。请根据示意图和描述完成以下小题。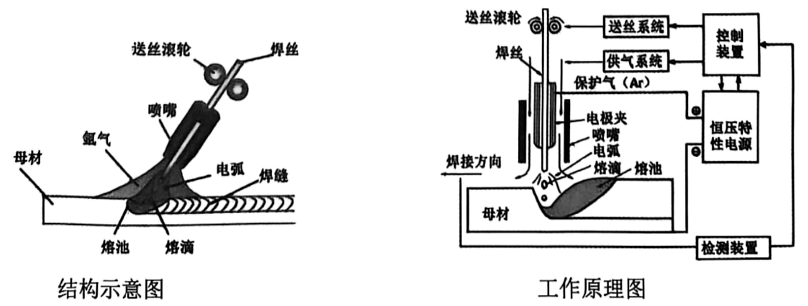 (1)、下列关于熔化极氩弧焊枪系统的分析中不恰当的是( )A、检测装置的目的是自动采集焊枪移动的速度及距离,体现了系统的目的性 B、由控制装置、送丝系统、供气系统、检测装置等部分组成,体现了系统的整体性 C、库存的喷嘴的性能是该系统优化的约束条件 D、设计焊枪时,应该先考虑总体要求,然后对送丝系统、供气系统、检测装置等部分进行设计,体现了系统分析的整体性原则(2)、关于熔化极氩弧焊枪系统,下列从控制系统角度进行的分析中不恰当的是( )A、喷射出熔滴是输出量 B、控制装置的输出信号不是控制量 C、焊接方向改变属于干扰因素 D、控制方式属于开环控制8. 在通用技术实践课中,小明在面包板上插装了如图所示的电阻、二极管、电解电容、三极管、电位器、发光二极管、555芯片,其中插装不正确的个数有( )
(1)、下列关于熔化极氩弧焊枪系统的分析中不恰当的是( )A、检测装置的目的是自动采集焊枪移动的速度及距离,体现了系统的目的性 B、由控制装置、送丝系统、供气系统、检测装置等部分组成,体现了系统的整体性 C、库存的喷嘴的性能是该系统优化的约束条件 D、设计焊枪时,应该先考虑总体要求,然后对送丝系统、供气系统、检测装置等部分进行设计,体现了系统分析的整体性原则(2)、关于熔化极氩弧焊枪系统,下列从控制系统角度进行的分析中不恰当的是( )A、喷射出熔滴是输出量 B、控制装置的输出信号不是控制量 C、焊接方向改变属于干扰因素 D、控制方式属于开环控制8. 在通用技术实践课中,小明在面包板上插装了如图所示的电阻、二极管、电解电容、三极管、电位器、发光二极管、555芯片,其中插装不正确的个数有( )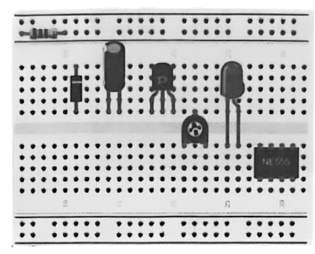 A、1个 B、2个 C、3个 D、4个9. 如图a所示是由两个与非门组成的基本RS触发器电路,当输入端加载如图b所示的信号时,在0-10秒时间段内,VD点亮的总时长约为( )
A、1个 B、2个 C、3个 D、4个9. 如图a所示是由两个与非门组成的基本RS触发器电路,当输入端加载如图b所示的信号时,在0-10秒时间段内,VD点亮的总时长约为( ) A、3秒 B、4秒 C、5秒 D、6秒10. 如图a所示是小明设计的充电电路。E是充满电压为3V的充电电池,快慢充转换的基准电压设定为2.8V,当电池快充到2.8V后,转换为慢充。其中稳压二极管VDZ1的稳压值为5.6V。NE555集成电路的复位端4脚、输入端2脚及6脚与输出端3脚的逻辑关系如下表所示,其中Vct为5脚电位。下列分析中不恰当的是( )
A、3秒 B、4秒 C、5秒 D、6秒10. 如图a所示是小明设计的充电电路。E是充满电压为3V的充电电池,快慢充转换的基准电压设定为2.8V,当电池快充到2.8V后,转换为慢充。其中稳压二极管VDZ1的稳压值为5.6V。NE555集成电路的复位端4脚、输入端2脚及6脚与输出端3脚的逻辑关系如下表所示,其中Vct为5脚电位。下列分析中不恰当的是( ) A、慢充时VD1灭、VD2亮 B、快充时VT2工作于放大状态 C、适当调小Rp2的阻值,可调大快充时的充电电流 D、若电池快充到2.7V就转换为慢充,可能是R1阻值偏大
A、慢充时VD1灭、VD2亮 B、快充时VT2工作于放大状态 C、适当调小Rp2的阻值,可调大快充时的充电电流 D、若电池快充到2.7V就转换为慢充,可能是R1阻值偏大二、非选择题(本大题共3小题,第28题8分,第29题10分,第30题8分,共26分。各小题中的“_________”处填写合适选项的字母编号,特殊说明按要求作答)
-
11. 如图所示是2025年央视春晚机器人与真人演员共同演绎秧歌舞蹈的画面。机器人不仅能完成高难度的转手绢表演,还可以流畅地行走和转身,引起了社会的广泛关注。
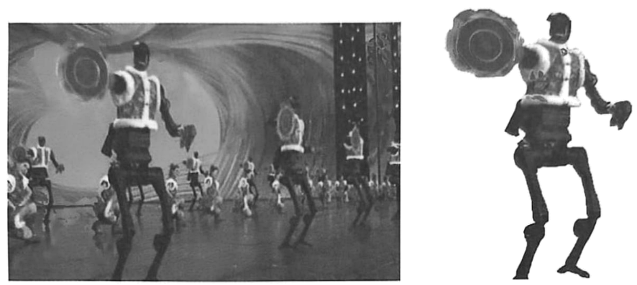
请完成以下任务:
(1)、下列关于该机器人的分析不恰当的是(多选)______________A、人形机器人的身高为180cm,考虑了人的动态尺寸 B、骨架采用PEEK材料,具有较高的刚性、韧性且质量轻,是机器人设计的物质条件 C、机器人的舞蹈动作需要硬件、软件的技术支持,说明设计是技术的基础 D、该机器人是全球首款能完成原地空翻的全尺寸电驱人形机器人,体现了技术的创新性 E、机器人技术广泛应用于教育、娱乐、服务等领域,体现了技术的价值(2)、小通看了节目后,想设计一个机器人运动模型,在液压杆的作用下,可实现双脚板前后交替运动。虚线框部分的连接件,小明设计了以下几种方案,其中能实现功能的是____________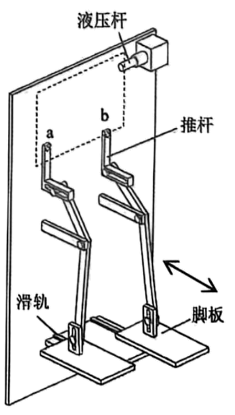 A、
A、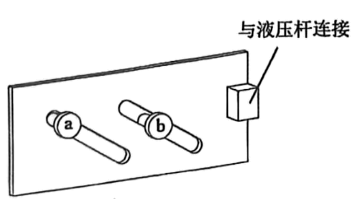 B、
B、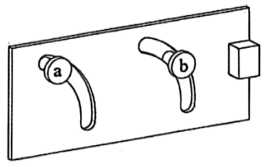 C、
C、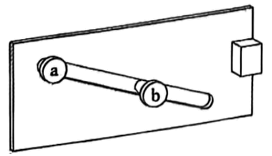 D、
D、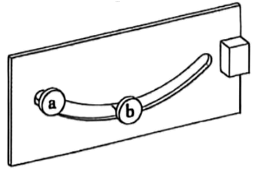 (3)、脚板与滑轨的连接方式属于_____________A、刚连接 B、铰连接 C、既不是刚连接也不是铰连接(4)、小通准备在通用技术实践室用钢板加工推杆,需要用到的工具有(多选)___________A、
(3)、脚板与滑轨的连接方式属于_____________A、刚连接 B、铰连接 C、既不是刚连接也不是铰连接(4)、小通准备在通用技术实践室用钢板加工推杆,需要用到的工具有(多选)___________A、 B、
B、 C、
C、 D、
D、 E、
E、 F、
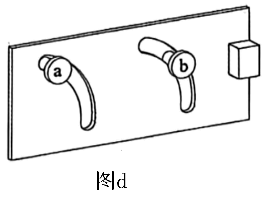
F、 12. 小明在制作2025年央视春晚机器人运动模型(如图a所示)时发现没有液压杆,现改用电机驱动,已知现有电机转轴末端截面为D字形(如图b所示),尺寸如图c所示。请你帮助小明重新设计缺少的机械传动装置,设计要求如下:
12. 小明在制作2025年央视春晚机器人运动模型(如图a所示)时发现没有液压杆,现改用电机驱动,已知现有电机转轴末端截面为D字形(如图b所示),尺寸如图c所示。请你帮助小明重新设计缺少的机械传动装置,设计要求如下: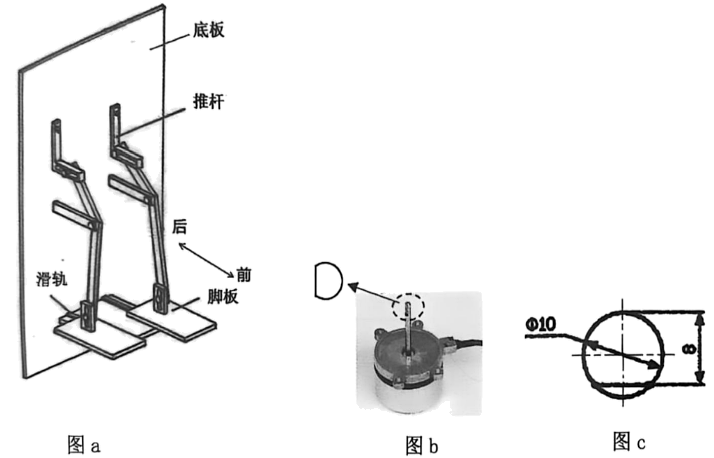
(a)传动装置固定在底板上,并分别连接2根推杆上端φ8圆孔
(b)电机单向转动实现双脚板前后交替运动,装置平稳可靠
(c)采用一个电机驱动
(d)不能与方案(如图d)完全相同
请完成以下任务:
(1)、在头脑中构思符合设计要求的多个方案,画出其中最优方案的设计草图(装置安装涉及到的底板用线条表示,电机可用方框表示),必要时配以文字说明(2)、在草图上标注主要尺寸(3)、设计并加工好装置后,小明进行了以下技术试验,其中不合理的有(多选)___________A、电机断电,用手拨动电机轴的连接杆(或连接齿轮等),观察双脚板能否前后交替运动 B、启动电机,观察双脚板前后交替运动是否顺畅 C、装置运行中,用力抓住推杆,观察装置能否在推杆卡住的情况下自动停止运行 D、用力拍打推杆,观察推杆是否会弯曲形变或折断13. 如图a所示为小通寝室温度控制系统,现室内温度控制在22-25℃,当温度超过上限时启动制冷器M,当温度低于下限时,关闭制冷器M。 (1)、为实现该系统的控制功能,电路中热敏电阻Rt的类型应采用_____________A、正温度系数 B、负温度系数(2)、国家《室内空气质量标准》中明确规定,夏季空调房内温度的标准值为22℃—28℃。达到这个标准的室内温度就是舒适的室内温度。因此将室内温度上限调高到28℃,下列措施合理的是________A、先调小Rp1,后调大Rp4 B、仅调大Rp4 C、先调大Rp1,后调小Rp4 D、仅调小Rp4(3)、小通想增设寝室无人时,制冷器不启动的功能。小通增加了人体感应模块IC,有人时输出低电平,无人时输出高电平。请用二输入或非门在虚线框1内完成电路设计实现上述功能,要求电路简单
(1)、为实现该系统的控制功能,电路中热敏电阻Rt的类型应采用_____________A、正温度系数 B、负温度系数(2)、国家《室内空气质量标准》中明确规定,夏季空调房内温度的标准值为22℃—28℃。达到这个标准的室内温度就是舒适的室内温度。因此将室内温度上限调高到28℃,下列措施合理的是________A、先调小Rp1,后调大Rp4 B、仅调大Rp4 C、先调大Rp1,后调小Rp4 D、仅调小Rp4(3)、小通想增设寝室无人时,制冷器不启动的功能。小通增加了人体感应模块IC,有人时输出低电平,无人时输出高电平。请用二输入或非门在虚线框1内完成电路设计实现上述功能,要求电路简单 (4)、系统工作一段时间后,二极管VD2损坏了,请你帮助小通利用一个合适的三极管在虚线框2内选择合适的端子连线,要求功能不变(为保持电路稳定,三极管需工作于开关状态,Rt特性不变)
(4)、系统工作一段时间后,二极管VD2损坏了,请你帮助小通利用一个合适的三极管在虚线框2内选择合适的端子连线,要求功能不变(为保持电路稳定,三极管需工作于开关状态,Rt特性不变)