题库组卷系统-专注K12在线组卷服务
充值中心
开通VIP会员
特惠下载包
激活权益
帮助中心
登录
注册
试题
试卷
试题
在线咨询
当前:
高中通用技术
小学
语文
数学
英语
科学
道德与法治
初中
语文
数学
英语
科学
物理
化学
历史
道德与法治
地理
生物学
信息技术
历史与社会(人文地理)
社会法治
高中
语文
数学
英语
物理
化学
历史
思想政治
地理
生物学
信息技术
通用技术
首页
手动组卷
章节同步选题
知识点选题
智能组卷
章节智能组卷
知识点智能组卷
细目表组卷
试卷库
同步专区
备考专区
高考专区
专题特供
在线测评
测
当前位置:
高中通用技术
/
苏教版(2019)
/
必修《技术与设计2》
/
第四单元 控制及其设计
/
本单元复习与测试
试卷结构:
课后作业
日常测验
标准考试
|
显示答案解析
|
全部加入试题篮
|
平行组卷
试卷细目表
发布测评
在线自测
试卷分析
收藏试卷
试卷分享
下载试卷
下载答题卡
苏教版(2019)高中通用技术2022-2023学年必修《技...
下载试题
平行组卷
收藏试卷
在线测评
发布测评
在线自测
答题卡下载
更新时间:2023-03-31
浏览次数:60
类型:单元试卷
试卷属性
副标题:
无
*注意事项:
无
苏教版(2019)高中通用技术2022-2023学年必修《技...
更新时间:2023-03-31
浏览次数:60
类型:单元试卷
考试时间:
分钟
满分:
分
姓名:
____________
班级:
____________
学号:
____________
*注意事项:
1、填写答题卡的内容用2B铅笔填写
2、提前 xx 分钟收取答题卡
一、选择题
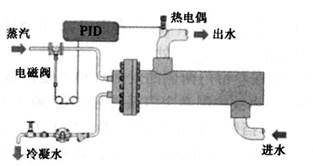
1. 如图所示是某水温控制系统示意图。蒸汽对容器中的水加热后变成冷凝水排出。热电偶对出水的温度进行检测,并将测得的信号送到PID控制器与设定的温度比较PID控制器根据偏差值控制电磁阀调节蒸汽的流量。下列因素的变化对蒸汽流量的调节没有影响的是( )
A .
冷凝水的温度
B .
进水的温度
C .
热电偶的性能
D .
PID控制器的设定参数
答案解析
收藏
纠错
+ 选题
2.
(2020·浙江会考)
某游泳池水位控制系统的控制过程为:水位传感器检测游泳池的实际水位,并将信号返回到输入端与设定水位进行比较,当实际水位低于设定水位时,控制器发出指令打开进水阀门;当实际水位达到设定水位时,控制器发出指令关闭进水阀门。下列说法中不正确的是( )
A .
该控制方式是闭环控制
B .
设定水位发生变化是干扰因素
C .
被控对象是游泳池
D .
执行器是进水阀门
答案解析
收藏
纠错
+ 选题
3. 如图所示是浇铸机结晶器钢水液位控制系统示意图。浇铸时,中间包连续向结晶器浇注钢水,钢水在结晶器内冷却结晶后被拉坯装置拉出形成钢坯。结晶器内钢水液位的稳定和高低,直接影响钢坯的质量和产量。钢水液位波动引起电涡流传感器与液面之间的间隙产生变化,从而引起电涡流信号变化,液位仪根据信号的大小计算出实际液位,输送给PLC与液位设定值比较,PLC根据比较差值通过驱动器控制电动缸运动,带动塞棒升高或降低,改变中间包浇注口的大小,调节流入结晶器内钢水的流量,从而使液位稳定在一定范围内。该控制系统中对结晶器钢水液位控制精度没有影响的是( )
A .
液位设定值
B .
液位仪的性能
C .
电动缸的运动精度
D .
电涡流传感器的灵敏度
答案解析
收藏
纠错
+ 选题
4. 为方便人们出入,一些医院、宾馆等场所都安装了自动门。当人走近门时,红外装置检测到人体热辐射发出的红外信息,控制电路接收信号并发出指令,启动电动机将门打开,反之门关闭。下列关于该自动门控制系统的分析中说法正确的是( )
A .
红外装置起反馈作用
B .
电动机的转动是被控量
C .
被控对象是医院、宾馆等场所
D .
门的开启或关闭是输出量
答案解析
收藏
纠错
+ 选题
5. 小明要为听觉障碍者的住所设计一个门铃控制系统,当有人来访时,“门铃”能提醒听觉障碍者。设计时他将指示灯确定为被控对象,下列构思不可行的是( )
A .
该控制系统的控制手段可选用自动控制
B .
执行器可选用电子开关
C .
声音传感器可作为检测部件
D .
该控制系统的控制方式可定为闭环控制
答案解析
收藏
纠错
+ 选题
6.
(2020·浙江)
如图所示是汽车蓄电池电量控制系统示意图。汽车电气负载消耗蓄电池的电能,当蓄电池电量下降到设定值下限时,发电机在动力控制模块的控制下给蓄电池充电,电量检测装置检测到蓄电池电量达到设定值上限时,发电机停止给蓄电池充电。下列关于该控制系统的分析中正确的是( )
A .
被控对象是汽车
B .
汽车电气负载变化属于干扰因素
C .
执行器是动力控制模块
D .
控制量是蓄电池的电量
答案解析
收藏
纠错
+ 选题
7. 如图所示是液体原料定量控制系统。其工作过程是:流量计检测到流出的液体原料流量值,把信号反馈给控制器,与设定的流量值进行比较,达到设定的流量值时,控制器控制桶泵关闭。请回答小题。
(1) 关于该定量控制系统,以下说法正确的是( )
A .
因为有检测装置,所以该控制系统是闭环控制
B .
该控制系统的被控对象是桶泵
C .
该控制系统的控制量是设定的流量值
D .
该控制系统的被控量是液体原料的流量值
(2) 在桶泵停止运行后,由于软管中的原料具有惯性会继续流动,导致误差。为了提高计量精度,以下对该系统进行优化的措施中最合适的是( )
A .
减小软管的直径
B .
缩短软管的长度
C .
提高流量计的计量精度
D .
在软管出口端加电磁阀与桶泵同步控制
答案解析
收藏
纠错
+ 选题
8. 如图所示是自动门示意图。当人走进感应区域时,检测装置探测到人体信号,控制电路接收到该信号后,发出相应的指令,启动电动机把门打开。当门开启之后,控制电路将做出判断,如果没有人在感应区域内,就通知电动机做反向运转,将门关闭。关于该控制系统,下列说法中正确的是( )
A .
输入量是人体信号,所以是人工控制
B .
门开启之后可以自动关闭,存在反馈环节
C .
自动门的开启或关闭与检测装置是否检测到人体信号相对应
D .
有人在感应区内从门口经过不会对系统的控制产生干扰
答案解析
收藏
纠错
+ 选题
9. 如图所示,某数控机床的基本组成包括加工程序载体、数控装置、伺服驱动装置、机床主体和其他辅助装置。其中伺服系统是数控机床的重要组成部分,用于实现数控机床的进给伺服控制和主轴伺服控制。伺服系统的作用是把接受来自数控装置的指令信息,经功率放大、整形处理后,转换成机床执行部件的直线位移或角位移运动。测量元件将数控机床各坐标位的实际位移值检测出来并经反馈系统输入到机床的数控装置中,数控装置对反馈回来的实际位移值与指令值进行比较,并向伺服系统输出达到设定值所需的位移量指令。关于该数控机床说法不正确的是( )
A .
数控机床控制系统为闭环控制
B .
控制量是向伺服系统输出的达到设定值所需的位移量
C .
给定量是数控机床各坐标轴的设定位移值
D .
被控对象是机床主体
答案解析
收藏
纠错
+ 选题
10.
(2021·浙江模拟)
如图所示为一款四旋翼无人机及其控制示意图。四旋翼飞行器的所有姿态和位置的控制都是通过调节四个驱动电机的转速实现。当无人机处于悬停控制模式时,能根据设定值在空中保持静止。下列关于无人机悬停控制系统的说法中不合理的是( )
A .
该控制系统属于闭环控制系统
B .
该控制系统的被控量是无人机
C .
空中气流变化属于干扰因素
D .
该控制系统的控制手段是自动控制
答案解析
收藏
纠错
+ 选题
11.
(2019高一下·浙江期中)
外出旅游时家中植物无人照看,小明想设计一个精度较高的植物盆栽土壤湿度控制系统。当土壤干燥时,系统能自动浇水直至符合湿度要求。关于该系统的设计,下列构思最合理的是( )
A .
该控制系统可选用开环控制方式
B .
该控制系统控制手段可选用定时的机械控制
C .
检测元件可选用湿度传感器
D .
检测装置可放置在花盆边缘的土壤表面
答案解析
收藏
纠错
+ 选题
12. 如图所示是物料自动混合装置控制系统示意图,其基本工作过程如下:物料进口阀门受液位传感器的影响,当加入的物料达到高液位时,停止进料。若物料混合需要加热,则开启加热器,当检测到温度达到或超过设定值时,停止加热,启动电动机开始搅拌,当达到设定时间后,电动机停止,开启排放阀,排放混合后的物料。从控制的角度分析,下列说法不正确的是( )
A .
物料加热控制子系统中,执行器是加热器
B .
注料液位控制子系统中,执行器是排放阀
C .
液位控制和加热控制子系统的控制器都是PLC
D .
液位控制和加热控制子系统都是闭环控制系统
答案解析
收藏
纠错
+ 选题
13. 如图所示为一款数字扭矩扳手,可以预设扭力值,使用该扳手拧紧螺帽时,高精度扭矩传感器灵敏有效地将施加的扭矩转变为电信号,当施加扭矩达到预设扭力值时,控制电路控制电子开关闭合,发出声音提示和灯光闪烁警示。下列关于该数字扭矩扳手的报警控制系统的描述中正确的是( )
A .
控制方式属于闭环控制
B .
输入量是预设扭力值
C .
控制量是电子开关的闭合
D .
输出量是实际施加扭矩
答案解析
收藏
纠错
+ 选题
14. 如图所示为温室智能控制系统。其工作过程为各种传感器采集温室内的土壤湿度、土壤温度、光照强度等实时环境数据,传输到控制中心,由中心平台系统将最新监测数据与预先设定适合农作物生长的环境参数进行比较,如发现传感器监测到的数据与预设数值有了偏差,控制中心会自动发出指令开启电机、水阀、灯等设备进行调节,给作物提供合适的优良的生长环境。请根据示意图及其描述完成小题。
(1) 关于该温室智能控制系统,下列分析中不恰当的是( )
A .
温室智能控制系统由传感器、控制平台、电磁阀等部分组成,体现了系统的整体性
B .
先进的远程工业自动化控制技术让用户足不出户远程控制温室设备,体现了系统的目的性
C .
需要定期检查更换传感器,体现了系统的环境适应性
D .
该系统各要素之间相互联系、相互作用,体现了系统的相关性
(2) 下列关于该温室智能控制系统分析中正确的是( )
A .
该系统对土壤湿度的控制属于开环控制
B .
该系统存在反馈装置
C .
被控对象是温室的环境数据
D .
输入量是土壤
答案解析
收藏
纠错
+ 选题
15. 如图a所示的“稳拍器”能保持拍摄设备的相对稳定,如图b所示是“稳拍器”的原理框图。加速度和陀螺仪传感器将“摄像设备”的姿态反馈给中央MCU处理单元,中央MCU处理单元根据检测到的“摄像设备”的姿态和运动情况,去控制电机做相应的动作,电机动作使“摄像设备”保持相对稳定状态,拍出来的照片更清楚,录制的录像更稳定。下列关于该控制系统的分析中正确的是( )
A .
被控对象是电机
B .
拍摄中的晃动属于干扰因素
C .
执行器是中央MCU处理单元
D .
控制量是“摄像设备”的姿态
答案解析
收藏
纠错
+ 选题
16. 如图所示是农业大棚多点温室测控系统。其中包括温度控制和湿度控制。温度控制是当大棚内温度过高时增温降温器会降温,当温度过低时增温降温器会增温。湿度控制是当大棚内湿度过低时大棚增湿器会在地膜下暗灌一定的水量,当湿度过高时会开启通风设备,当湿度低于上限时停止通风。下列关于该控制系统的分析中正确的是( )
A .
温度控制子系统是闭环控制系统,湿度控制子系统是开环控制系统
B .
温度控制子系统的控制器是增温降温器
C .
湿度控制子系统的执行器只有增湿器
D .
该控制系统的被控量是大棚的湿度和温度
答案解析
收藏
纠错
+ 选题
17. 如图所示为某商场门口的电动液压升降柱,通过升降柱来限制车辆从而保障交通秩序以及场所安全。电动液压升降柱是由升降柱柱体、液压传动站、自动检控器三部分共同组成。升降柱控制系统可遥控,也可自动识别,其中自动识别控制过程如下:当汽车靠近时,由车牌识别器识别车牌信息并传递给计算机,计算机控制小型大扭矩电机带动液压杠中的活塞上下运动,从而实现升降柱柱体的上升和下降。下列对该控制系统的分析中正确的是( )
A .
被控对象是汽车
B .
不同的车牌号码是该控制系统的干扰因素
C .
执行器是电机和活塞模块
D .
控制量是升降柱柱体的上升和下降
答案解析
收藏
纠错
+ 选题
18. 如图所示为某造纸厂纸张卷绕系统示意图,在卷绕过程中,要求纸张卷绕后的侧面整齐一致。卷绕系统由卷筒驱动子系统和纠偏控制子系统组成。驱动系统由伺服电机和传动装置等组成;纠偏控制子系统的工作过程为:光电传感器检测纸张边缘位置信息,并将信息输入PLC控制单元与设定值比较,根据偏差值,控制油泵输出高压油进入油缸,推动活塞带动支架移动,从而将纸张整齐卷绕在卷辊上。请根据示意图及描述完成小题。
(1) 从系统的角度分析,下列说法正确的是( )
A .
伺服电机和传动装置是纠偏控制子系统中的两个要素
B .
卷辊上纸张的多少影响着活塞的推力大小,体现了系统的整体性
C .
能使纸张卷绕后的侧面整齐一致,体现了系统的动态性
D .
油泵和油缸的性能是影响该系统优化的因素
(2) 下列关于纠偏控制子系统的分析中不正确的是( )
A .
被控对象是油缸
B .
纠偏控制子系统为闭环控制
C .
活塞的移动量是系统的控制量
D .
光电传感器参与了系统的反馈过程
答案解析
收藏
纠错
+ 选题
二、非选择题
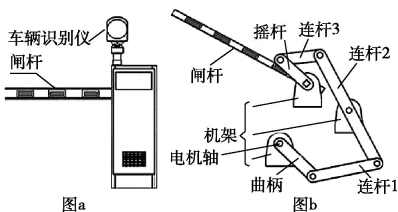
19. 某学校安装了如图a所示的道闸控制系统,只有登记的机动车才能快速通过。该道闸由车辆识别仪、控制模块、电机、传动机构、平衡装置、机箱、闸杆等部分组成。当登记的汽车驶入识别区域时,控制模块控制电机转动,升起闸杆。请根据示意图和描述,完成以下任务。
(1) 该控制系统的控制方式和控制手段属于
、
(在“A .开环控制;B .闭环控制;C .人工控制;D .自动控制”中选择合适的选项,将字母填入横线处);
(2) 不属于该控制系统干扰因素的是
(在“A .车辆识别仪的灵敏度下降;B .传动机构各连杆磨损;C .驶入识别区域的机动车的车牌发生变化”中选择合适的选项,将字母填入横线处);
(3) 该道闸控制系统在设计时既要考虑系统的先进性、可靠性,同时还要兼顾系统的可扩展性和易维护性,体现了系统分析的
(在“A .整体性原则;B .科学性原则;C .综合性原则”中选择合适的选项,将字母填入横线处);
(4) 如图b所示为闸杆升降运动的驱动机构,此刻若电机轴逆时针转动,则闸杆的运动方向为
(在“A .升起;B .下降;C .保持不动”中选择合适的选项,将字母填入横线处);
(5) 小明发现当有车辆冲撞闸杆时,容易造成闸杆弯曲断裂。小明构思了以下杆把的结构,下列设计方案中合理的是( )(在下列选项中选择合适的选项,将字母填入括号处)。
A .
用钢板加固档板
B .
碰撞时闸杆向前转动
C .
碰撞时闸杆向上转动
答案解析
收藏
纠错
+ 选题
20. 如图甲所示是自动配料控制系统的示意图。称重传感器将检测到的落料质量信号送到PLC,与设定质量比较,再通过调速流量调节器控制落料;PLC通过速度传感器检测驱动电机的转速,来控制变频器变频,调整电机的转速来达到皮带速度与设定值一致。根据自动配料系统,完成以下的题目。
(1) 自动配料控制系统包括流量控制与速度控制,其中流量控制的控制手段是
,速度控制的控制方式是
。(在“A .开环控制;B .闭环控制;C .人工控制;D .自动控制”中选择合适的选项,将字母填入横线处);
(2) 配料流量控制与电机速度控制的执行器分别是
和
(在“A.流量调节器;B.料斗;C.驱动电动机;D.变频器”中选择合适的选项,将字母填入横线处);
(3) 如图所示的是系统启动时的工作流程图,以下关于该流程图(图乙)说法中,不合理的是
(在“A .‘料斗有料?’的判断是其中一个环节;B .实时计量与PID调节是串行工序;C .启动生产线与电动机运行是并行工序”中选择合适的选项,并将字母填入横线处);
(4) 在设计时,要实现一个稳定的流量输出,要建立料斗出料与速度之间的数量关系,才能比较精确地实现一定的流量输出。这在系统分析中符合
原则(在“A .整体性;B .综合性;C .科学性”中选择合适的选项,将字母填入横线处)。
答案解析
收藏
纠错
+ 选题
21. 如图所示是一种车库门关门控制系统示意图,图中汽车从车库中开出,卷帘门上方的超声波传感器检测汽车开出的距离,当超出一定的距离时,可编程控制器PLC给电动机指令,电动机转动带动卷帘门关闭。请根据示意图和描述,完成以下任务:
(1) 该系统的控制手段和控制方式分别属于
和
(在“①手动控制;②自动控制;③开环控制;④闭环控制”中选择合适的选项,将序号填入横线处);
(2) 该系统的被控对象是
(在“①卷帘门;②电动机;③汽车”中选择合适的选项,将序号填入横线处);
(3) 系统示意图中装在卷帘门两侧的发射灯和光敏传感器的作用应该是
(在“①实现白天超声波控制卷帘门系统起作用,晚上不起作用;②当汽车开到卷帘门中间的时候,汽车挡住发射灯的光线,卷帘门开始关闭;③防止超声波传感器出现故障时,当汽车在卷帘门下方,卷帘门不会被关闭”中选择合适的选项,将序号填入横线处);
(4) 为了实现卷帘门关到底部时准确地停止,对该系统优化的有效措施是
和
(在“①增加定时器与系统相连,并改用精准度高的电动机;②增加速度传感器与系统相连,并且降低电动机转速;③卷帘门的底部安装限位开关与系统相连;④提高超声波传感器的灵敏度”中选择合适的选项,将序号填入横线处)。
答案解析
收藏
纠错
+ 选题
22. 如图所示为汽车电动助力转向控制系统示意图,其工作原理是电子控制单元ECU根据扭矩传感器检测到的转向盘转角信号、汽车速度信号和汽车负载信号综合确定转向助力大小和方向,并控制电动机相应转动,电动机作用于减速机构,减速机构带动转向齿轮、转向齿条和连接杆使车轮转到相应角度。请根据示意图和描述,完成以下任务:
(1) 该系统的控制手段和方式分别属于
和
(在“①手动控制;②自动控制;③开环控制;④闭环控制”中选择合适的选项,将序号填入横线处);
(2) 该系统的被控对象是
(在“①电动机;②减速机构;③转向齿轮、转向齿条和连接杆;④车轮”中选择合适的选项,将序号填入横线处);
(3) 该系统中的负载信号的传感器应选用
(在“①速度传感器;②力敏传感器;③磁敏传感器”中选择合适的选项,将序号填入横线处);
(4) 属于该系统干扰因素的是
(在“①汽车刹车减速;②驾驶员猛打方向盘;③汽车进入强力磁场区域;④汽车驶过坑洼地带”中选择合适的选项,将序号填入横线处)。
答案解析
收藏
纠错
+ 选题
微信扫码预览、分享更方便
详情
试题分析
(总分:
0
)
总体分析
题量分析
难度分析
知识点分析
试卷信息





 用钢板加固档板
B .
用钢板加固档板
B . 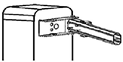 碰撞时闸杆向前转动
C .
碰撞时闸杆向前转动
C . 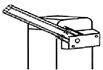 碰撞时闸杆向上转动
碰撞时闸杆向上转动