人教版初中数学七年级下册 7.1.2 平面直角坐标系 同步分层训练 培优题
试卷更新日期:2024-03-19 类型:同步测试
一、选择题
-
1. 点在第二象限内,且到轴的距离是4,到轴的距离是3,那么点的坐标为( )A、 B、 C、 D、2. 在平面直角坐标系中,点P(2,﹣3)在( )A、第一象限 B、第二象限 C、第三象限 D、第四象限3. 平面直角坐标系内AB∥x轴,AB=1,点A的坐标为(-2,3),则点B的坐标为( )A、(-1,4) B、(-1,3) C、(-3,3)或(-1,-2) D、(-1,3)或(-3,3)4. 若点P(m-2,-1-3m)在第三象限,则m的取值范围( )A、m<2 B、 C、 D、5. 在平面直角坐标系中,下列说法:
①若点A(a,b)在坐标轴上,则ab=0;②若m为任意实数,则点(2,m2)一定在第一象限;③若点P到x轴的距离与到y轴的距离均为2,则符合条件的点P有2个;④已知点M(2,3),点N(-2,3),则MN∥x轴.其中正确的是( )
A、①④ B、②③ C、①③④ D、①②④6. 如图,平面直角坐标系中,长方形的四个顶点坐标分别为 , , , , 点P从点A出发,沿长方形的边顺时针运动,速度为每秒2个长度单位,点Q从点A出发,沿长方形的边逆时针运动,速度为每秒3个长度单位,记P,Q在长方形边上第1次相遇时的点为 , 第二次相遇时的点为 , 第三次相遇时的点为 , ……,则点的坐标为( ) A、 B、 C、 D、7. 如图,在直角坐标系中,一个智能机器人接到的指令是:从原点O出发,按“向上向右向下向右”的方向依次不断移动,每次移动1个单位长度,其移动路线如图所示,第1次移动到点 , 第2次移动到点 , …第n次移动到点 , 则点的坐标是( )
A、 B、 C、 D、7. 如图,在直角坐标系中,一个智能机器人接到的指令是:从原点O出发,按“向上向右向下向右”的方向依次不断移动,每次移动1个单位长度,其移动路线如图所示,第1次移动到点 , 第2次移动到点 , …第n次移动到点 , 则点的坐标是( ) A、 B、 C、 D、8. 如图,在直角坐标系中,每个网格小正方形的边长均为1个单位长度,以点P为位似中心作正方形 , 正方形 , 按此规律作下去,所作正方形的顶点均在格点上,其中正方形的顶点坐标分别为 , , 则顶点的坐标为( )
A、 B、 C、 D、8. 如图,在直角坐标系中,每个网格小正方形的边长均为1个单位长度,以点P为位似中心作正方形 , 正方形 , 按此规律作下去,所作正方形的顶点均在格点上,其中正方形的顶点坐标分别为 , , 则顶点的坐标为( )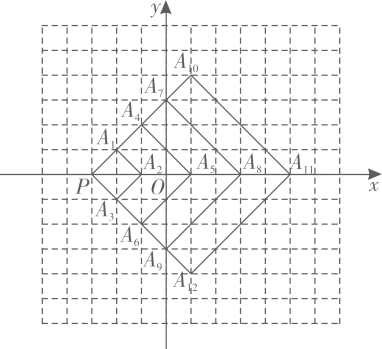 A、 B、 C、 D、
A、 B、 C、 D、二、填空题
-
9. 在平面直角坐标系中,点到x轴的距离是.10. 若点在y轴上,则点P的坐标为.11.(1)、已知点A(0,3),B(2,-2),C( , 0),D(0,0).其中在x轴上的点有 , 在y轴上的点有(2)、如果点P在x轴的正半轴上,到原点的距离是3,那么点P的坐标为 , 如果点P在y轴的负半轴上,到原点的距离是3,那么点P的坐标为 . 如果点 P在第二象限,到x轴的距离是4,到y轴的距离是3,那么点P的坐标为12. 如图,动点P在平面直角坐标系中按图中箭头所示方向运动,第1次从原点运动到点(1,1),第2次接着运动到点(2,0),第3次接着运动到点(3,2),……按这样的运动规律,经过第2015次运动后,动点P的坐标是 .
 13. 如图,若干个点以箭头方向排列,则第1000个点的坐标为 .
13. 如图,若干个点以箭头方向排列,则第1000个点的坐标为 .
三、解答题
-
14. 已知点是平面直角坐标系上的点.(1)、若点是第二象限的角平分线上一点,求点的坐标;(2)、若点在第一象限,且到两坐标轴的距离之和为9,求点的坐标.15. 如图所示,点坐标 , 点在轴上,将沿轴负方向平移,平移后的图形为 , 且点的坐标为 .
 (1)、请直接写出点,点的坐标; .(2)、在四边形中,点从点出发,沿“”移动.若点的速度为每秒1个单位长度,运动时间为秒,回答下列问题,并说明你的理由.
(1)、请直接写出点,点的坐标; .(2)、在四边形中,点从点出发,沿“”移动.若点的速度为每秒1个单位长度,运动时间为秒,回答下列问题,并说明你的理由.①求点在运动过程中的坐标(用含的式子表示)
②当为多少秒时,点的横坐标与纵坐标互为相反数.
四、综合题
-
16. 在平面直角坐标系中,已知点 , 点 .(1)、若M在x轴上,求m的值;(2)、若点M到x轴,y轴距离相等,求m的值;(3)、若轴,点M在点N的上方且 , 求n的值.17. 对于平面直角坐标中的任意两点P,Q,若点P到两坐标轴的距离之和等于点Q到两坐标轴的距离之和,则称P,Q两点为“和合点”,如图1中的P,Q两点即为“和合点”.

 (1)、已知点 , , , .
(1)、已知点 , , , .①在上面四点中,与点为“和合点”的是 ▲ ;
②若点 , 过点F作直线轴,点G直线l上,A、G两点为“和合点”,则点G的坐标为 ▲ ;
③若点在第二象限,点在第四象限,且A、M两点为“和合点”,D、N两点为“和合点”,求a,b的值.
(2)、如图2,已知点 , , 点是线段上的一动点,且满足 , 过点作直线轴,若在直线m上存在点S,使得R,S两点为“和合点”,直接写出n的取值范围.