山东省济宁市兖州区2022-2023学年高三上学期物理期中质量检测试卷
试卷更新日期:2022-12-22 类型:期中考试
一、单选题
-
1. 据悉,北汽新能源极狐阿尔法S的HI车型配备了华为自动驾驶技术,该车型在红绿灯启停、避让路口车辆、礼让行人、变道等方面都能无干预自动驾驶。某次试乘,时刻甲、乙两辆自动驾驶车同时并排出发,沿着同一平直路面行驶,它们的速度v随时间t变化的图像如图所示。下列正确的是( )
 A、时刻,甲、乙两车相遇 B、时间内,存在甲、乙两车加速度相同的时刻 C、时间内,甲、乙两车间的距离逐渐增大 D、时间内,甲车的平均速度小于乙车的平均速度2. 质点从P点到Q点做匀变速曲线运动,轨迹如图所示,运动到N点时速度方向与加速度方向互相垂直。下列说法中正确的是( )
A、时刻,甲、乙两车相遇 B、时间内,存在甲、乙两车加速度相同的时刻 C、时间内,甲、乙两车间的距离逐渐增大 D、时间内,甲车的平均速度小于乙车的平均速度2. 质点从P点到Q点做匀变速曲线运动,轨迹如图所示,运动到N点时速度方向与加速度方向互相垂直。下列说法中正确的是( ) A、M点的速率比N点小 B、M点的加速度比N点小 C、P点的加速度方向与速度方向平行 D、从P到Q的过程中加速度方向与速度方向的夹角一直减小3. 如图所示,半径为R的半球形陶罐,固定在可以绕竖直中心轴OO'匀速转动的水平转台中央处。质量为m的小物块随陶罐一起转动且相对罐壁静止,此时小物块受到的摩擦力恰好为0,且它和O点的连线与 OO'之间的夹角θ为60°,重力加速度为g。此时转台转动的角速度大小为( )
A、M点的速率比N点小 B、M点的加速度比N点小 C、P点的加速度方向与速度方向平行 D、从P到Q的过程中加速度方向与速度方向的夹角一直减小3. 如图所示,半径为R的半球形陶罐,固定在可以绕竖直中心轴OO'匀速转动的水平转台中央处。质量为m的小物块随陶罐一起转动且相对罐壁静止,此时小物块受到的摩擦力恰好为0,且它和O点的连线与 OO'之间的夹角θ为60°,重力加速度为g。此时转台转动的角速度大小为( ) A、 B、 C、 D、4. 北京时间2021年10月16日6时56分,神舟十三号载人飞船采用自主快速交会对接模式成功对接于空间站天和核心舱径向端口,翟志刚、王亚平、叶光富三名航天员成功进驻空间站天和核心舱,开始中国迄今时间最长的载人飞行。已知空间站轨道离地面的高度约为地球半径的 ,绕地球飞行的轨道可视为圆轨道。下列说法正确的是( )
A、 B、 C、 D、4. 北京时间2021年10月16日6时56分,神舟十三号载人飞船采用自主快速交会对接模式成功对接于空间站天和核心舱径向端口,翟志刚、王亚平、叶光富三名航天员成功进驻空间站天和核心舱,开始中国迄今时间最长的载人飞行。已知空间站轨道离地面的高度约为地球半径的 ,绕地球飞行的轨道可视为圆轨道。下列说法正确的是( ) A、空间站在轨道上运行的线速度大于 B、空间站在轨道上运行的加速度小于地面重力加速度g C、对接后,空间站由于质量增大,轨道半径将变小 D、若已知空间站的运行周期、地球半径和引力常量G,可求出空间站质量5. 如图所示,竖直墙壁与光滑水平地面交于B点,质量为的光滑半圆柱体紧靠竖直墙壁置于水平地面上,O为半圆柱体截面所在圆的圆心,质量为且可视为质点的均质小球用长度等于A、B两点间距离的细线悬挂于竖直墙壁上的A点,小球静置于半圆柱体上。当换用质量不变,而半径不同的光滑半圆柱体时,细线与竖直墙壁的夹角就会跟着发生改变。已知重力加速度为g,不计各接触面间的摩擦,下列正确的是( )
A、空间站在轨道上运行的线速度大于 B、空间站在轨道上运行的加速度小于地面重力加速度g C、对接后,空间站由于质量增大,轨道半径将变小 D、若已知空间站的运行周期、地球半径和引力常量G,可求出空间站质量5. 如图所示,竖直墙壁与光滑水平地面交于B点,质量为的光滑半圆柱体紧靠竖直墙壁置于水平地面上,O为半圆柱体截面所在圆的圆心,质量为且可视为质点的均质小球用长度等于A、B两点间距离的细线悬挂于竖直墙壁上的A点,小球静置于半圆柱体上。当换用质量不变,而半径不同的光滑半圆柱体时,细线与竖直墙壁的夹角就会跟着发生改变。已知重力加速度为g,不计各接触面间的摩擦,下列正确的是( ) A、当时,细线对小球的拉力大小为 B、当时,半圆柱体对小球的支持力大小为 C、换用半径更小的半圆柱体时,半圆柱体对地面的压力保持不变 D、换用半径不同的半圆柱体时,半圆柱体对竖直墙壁的最大压力大小为6. 某学校门口的车牌自动识别系统如图所示,闸杆水平时距水平地面高为 , 可绕转轴O在竖直面内匀速转动,自动识别区到的距离为 , 汽车匀速驶入自动识别区,自动识别系统识别的反应时间为 , 闸杆转动的角速度为。若汽车可看成高的长方体,闸杆转轴O与汽车左侧面的水平距离为 , 要使汽车顺利通过闸杆(车头到达闸杆处视为通过闸杆),则汽车匀速行驶的最大允许速度为( )
A、当时,细线对小球的拉力大小为 B、当时,半圆柱体对小球的支持力大小为 C、换用半径更小的半圆柱体时,半圆柱体对地面的压力保持不变 D、换用半径不同的半圆柱体时,半圆柱体对竖直墙壁的最大压力大小为6. 某学校门口的车牌自动识别系统如图所示,闸杆水平时距水平地面高为 , 可绕转轴O在竖直面内匀速转动,自动识别区到的距离为 , 汽车匀速驶入自动识别区,自动识别系统识别的反应时间为 , 闸杆转动的角速度为。若汽车可看成高的长方体,闸杆转轴O与汽车左侧面的水平距离为 , 要使汽车顺利通过闸杆(车头到达闸杆处视为通过闸杆),则汽车匀速行驶的最大允许速度为( ) A、 B、 C、 D、7. 如图所示,水平平台与水平细杆间的高度差为H,质量为M的物块放在水平台上,质量为M的小球套在水平杆上,物块和小球通过小滑轮与用轻质细线相连,滑轮右侧细线恰好竖直。现用一水平恒力F由静止沿杆拉动小球,物块始终在水平平台上,不计一切摩擦。则小球前进2H时,物块的速度为( )
A、 B、 C、 D、7. 如图所示,水平平台与水平细杆间的高度差为H,质量为M的物块放在水平台上,质量为M的小球套在水平杆上,物块和小球通过小滑轮与用轻质细线相连,滑轮右侧细线恰好竖直。现用一水平恒力F由静止沿杆拉动小球,物块始终在水平平台上,不计一切摩擦。则小球前进2H时,物块的速度为( ) A、 B、 C、 D、8. 滑块第一次从粗糙斜面顶端由静止下滑到底端,第二次以一定的初速度从斜面底端上滑刚好到达顶端。如图所示,某同学记录了滑块运动的频闪照片,若照片的时间间隔都相同,下列说法正确的是( )
A、 B、 C、 D、8. 滑块第一次从粗糙斜面顶端由静止下滑到底端,第二次以一定的初速度从斜面底端上滑刚好到达顶端。如图所示,某同学记录了滑块运动的频闪照片,若照片的时间间隔都相同,下列说法正确的是( ) A、图甲是滑块上滑的照片 B、滑块下滑时的加速度大小大于上滑时的加速度大小 C、滑块下滑到底端时的速度大小小于刚开始上滑时的初速度大小 D、滑块下滑过程所用时间等于上滑过程所用时间
A、图甲是滑块上滑的照片 B、滑块下滑时的加速度大小大于上滑时的加速度大小 C、滑块下滑到底端时的速度大小小于刚开始上滑时的初速度大小 D、滑块下滑过程所用时间等于上滑过程所用时间二、多选题
-
9. 喷淋装置将水沿不同方向喷出,其中A、B两个水珠的运动轨迹如图所示,不计空气阻力。由图可知( )
 A、空中运动时间A水珠较长 B、最高点速度B水珠较大 C、落地速度B水珠较大 D、若两水珠同时喷出,则有可能在轨迹相交处相遇10. 如图所示,内壁光滑的圆形细管固定在倾角为θ的斜面上,其半径为R,A、C分别为细管的最高点和最低点,B、D为细管上与圆心O处于同一水平高度的两点,细管内有一直径稍小于细管内径的质量为m的小球,小球可视为质点。开始时小球静止在A点,某时刻对小球施加轻微扰动,使小球自A向B沿着细管开始滑动。以过直线BOD的水平面为重力势能的参考平面,重力加速度为g,下列说法正确的是( )
A、空中运动时间A水珠较长 B、最高点速度B水珠较大 C、落地速度B水珠较大 D、若两水珠同时喷出,则有可能在轨迹相交处相遇10. 如图所示,内壁光滑的圆形细管固定在倾角为θ的斜面上,其半径为R,A、C分别为细管的最高点和最低点,B、D为细管上与圆心O处于同一水平高度的两点,细管内有一直径稍小于细管内径的质量为m的小球,小球可视为质点。开始时小球静止在A点,某时刻对小球施加轻微扰动,使小球自A向B沿着细管开始滑动。以过直线BOD的水平面为重力势能的参考平面,重力加速度为g,下列说法正确的是( ) A、小球不能返回到A点 B、小球自A点到B点的过程中,重力的瞬时功率一直增大 C、小球在C点时的机械能为2mgRsinθ D、小球到达D点时,细管对小球的作用力大小为11. 如图所示,用与水平面成角的传送带输送货物,传送带以的速度顺时针运行,地勤人员将一质量的货物以初速度从底部滑上传送带,货物恰好能到达传送带的顶端。已知货物与传动带之间的动摩擦因数为 , 取重力加速度 , 下列正确的是( )
A、小球不能返回到A点 B、小球自A点到B点的过程中,重力的瞬时功率一直增大 C、小球在C点时的机械能为2mgRsinθ D、小球到达D点时,细管对小球的作用力大小为11. 如图所示,用与水平面成角的传送带输送货物,传送带以的速度顺时针运行,地勤人员将一质量的货物以初速度从底部滑上传送带,货物恰好能到达传送带的顶端。已知货物与传动带之间的动摩擦因数为 , 取重力加速度 , 下列正确的是( ) A、货物在传送带上一直向上做匀减速直线运动 B、传送带从底端到顶端的长度是 C、货物在传动带上运动的时间为 D、货物在传动带上向上运动的过程中由于摩擦产生的热量为12. 2021 年10 月16 日,我国神舟十三号载人飞船成功发射,搭载着王亚平等3 名航天员与天宫号空间站顺利对接。3 位航天员进入空间站绕地球做圆周运动时,由于地球遮挡阳光,会经历“日全食”过程。已知地球半径为R,地球质量为M,引力常量为G,地球自转周期为T0 , 太阳光可看做平行光。如图所示,王亚平在A 点测出她对地球的张角为2θ,OA 与太阳光平行,下列说法正确的是( )
A、货物在传送带上一直向上做匀减速直线运动 B、传送带从底端到顶端的长度是 C、货物在传动带上运动的时间为 D、货物在传动带上向上运动的过程中由于摩擦产生的热量为12. 2021 年10 月16 日,我国神舟十三号载人飞船成功发射,搭载着王亚平等3 名航天员与天宫号空间站顺利对接。3 位航天员进入空间站绕地球做圆周运动时,由于地球遮挡阳光,会经历“日全食”过程。已知地球半径为R,地球质量为M,引力常量为G,地球自转周期为T0 , 太阳光可看做平行光。如图所示,王亚平在A 点测出她对地球的张角为2θ,OA 与太阳光平行,下列说法正确的是( ) A、空间站距地面的高度为 B、空间站的运行周期为 C、航天员每次经历“日全食”过程的时间为 D、航天员每天经历“日全食”的次数为
A、空间站距地面的高度为 B、空间站的运行周期为 C、航天员每次经历“日全食”过程的时间为 D、航天员每天经历“日全食”的次数为三、实验题
-
13. 学校物理兴趣小组用图甲装置探究物体质量一定时加速度与力的关系,其中桌面与细线已调至水平。
 (1)、关于本实验,下列说法正确的是________。A、必须用天平测出砂和砂桶的质量 B、砂和砂桶的总质量必须远小于小车的质量 C、应当先释放小车,再接通电源 D、需要改变砂和砂桶的总质量,打出多条纸带(2)、经正确操作,得到如图乙所示的纸带,已知打点计时器所接交流电源的频率为 , 相邻两计数点之间还有四个计时点未画出,则小车运动的加速度大小为。(结果保留两位有效数字)(3)、若小车的加速度大小a与力传感器示数F的关系如图丙所示,则小车的质量为。(结果保留两位有效数字)(4)、不断增加砂桶中砂的质量,重复实验,发现小车的加速度最后趋近于某一数值。若当地的重力加速度大小为g,则经理论分析可知,该数值为。14. 某同学利用如图装置来研究机械能守恒问题,设计了如下实验。A、B是质量均为m的小物块,C是质量为M的重物,A、B间由轻弹簧相连,A、C间由轻绳相连。在物块B下放置一压力传感器,重物C下放置一速度传感器,压力传感器与速度传感器相连。当压力传感器示数为零时,就触发速度传感器测定此时重物C的速度。整个实验中弹簧均处于弹性限度内,重力加速度为g。实验操作如下:
(1)、关于本实验,下列说法正确的是________。A、必须用天平测出砂和砂桶的质量 B、砂和砂桶的总质量必须远小于小车的质量 C、应当先释放小车,再接通电源 D、需要改变砂和砂桶的总质量,打出多条纸带(2)、经正确操作,得到如图乙所示的纸带,已知打点计时器所接交流电源的频率为 , 相邻两计数点之间还有四个计时点未画出,则小车运动的加速度大小为。(结果保留两位有效数字)(3)、若小车的加速度大小a与力传感器示数F的关系如图丙所示,则小车的质量为。(结果保留两位有效数字)(4)、不断增加砂桶中砂的质量,重复实验,发现小车的加速度最后趋近于某一数值。若当地的重力加速度大小为g,则经理论分析可知,该数值为。14. 某同学利用如图装置来研究机械能守恒问题,设计了如下实验。A、B是质量均为m的小物块,C是质量为M的重物,A、B间由轻弹簧相连,A、C间由轻绳相连。在物块B下放置一压力传感器,重物C下放置一速度传感器,压力传感器与速度传感器相连。当压力传感器示数为零时,就触发速度传感器测定此时重物C的速度。整个实验中弹簧均处于弹性限度内,重力加速度为g。实验操作如下:
⑴开始时,系统在外力作用下保持静止,细绳拉直但张力为零。现释放C,使其向下运动,当压力传感器示数为零时,触发速度传感器测出C的速度为v。
⑵在实验中保持A,B质量不变,改变C的质量M,多次重复第(1)步。
①该实验中,M和m大小关系必需满足M m(选填“小于”、“等于”或“大于”)
②为便于研究速度v与质量M的关系,每次测重物的速度时,其已下降的高度应 (选填“相同”或“不同”)
③根据所测数据,为得到线性关系图线,应作出 (选填“v2﹣M”、“v2﹣”或“v2﹣”)图线。
④根据③问的图线知,图线在纵轴上截距为b,则弹簧的劲度系数为 (用题给的已知量表示)。
四、解答题
-
15. 如图所示,质量的木块套在水平杆上,并用轻绳将木块与质量的小球相连。今用与水平方向成角的力拉着球带动木块一起向右匀速运动,运动中相对位置保持不变,不计空气阻力,。求:
 (1)、求运动过程中绳的拉力大小及绳与水平方向的夹角;(2)、求木块与水平杆间的动摩擦因数。16. 抗击疫情期间,由于疫情严重,利用无人机运输物资,如图所示为四旋翼无人机,它是一种能够垂直起降的小型遥控飞行器,目前正得到越来越广泛的应用,一架无人机连同所载货物质量的,其动力系统所能提供的最大升力 , 运动过程中所受空气阻力大小恒为。g取。
(1)、求运动过程中绳的拉力大小及绳与水平方向的夹角;(2)、求木块与水平杆间的动摩擦因数。16. 抗击疫情期间,由于疫情严重,利用无人机运输物资,如图所示为四旋翼无人机,它是一种能够垂直起降的小型遥控飞行器,目前正得到越来越广泛的应用,一架无人机连同所载货物质量的,其动力系统所能提供的最大升力 , 运动过程中所受空气阻力大小恒为。g取。 (1)、无人机在地面上从静止开始,以最大升力竖直向上起飞求在时离地面的高度h;(2)、当无人机悬停在距离地面高度处时,由手动力设备故障,无人机突然失去升力而坠落。求无人机坠落地面时的速度v;(3)、在无人机坠落过程中,在遥控设备的干预下动力设备重新启动提供向上最大升力,为保证安全着地,求飞行器从开始下落到恢复升力的最长时间。17. 如图所示,传送带A、B之间的距离为L=3.2m,与水平面间夹角θ= , 传送带沿顺时针方向转动,速度恒为v=2m/s,在上端A点无初速放置一个质量为m=1kg、大小可视为质点的金属块,它与传送带的动摩擦因数为μ=0.5,金属块滑离传送带后,经过弯道,沿半径R=0.4m的光滑圆轨道做圆周运动,刚好能通过最高点E,已知B、D两点的竖直高度差为h=0.5m(g取10m/s2)。
(1)、无人机在地面上从静止开始,以最大升力竖直向上起飞求在时离地面的高度h;(2)、当无人机悬停在距离地面高度处时,由手动力设备故障,无人机突然失去升力而坠落。求无人机坠落地面时的速度v;(3)、在无人机坠落过程中,在遥控设备的干预下动力设备重新启动提供向上最大升力,为保证安全着地,求飞行器从开始下落到恢复升力的最长时间。17. 如图所示,传送带A、B之间的距离为L=3.2m,与水平面间夹角θ= , 传送带沿顺时针方向转动,速度恒为v=2m/s,在上端A点无初速放置一个质量为m=1kg、大小可视为质点的金属块,它与传送带的动摩擦因数为μ=0.5,金属块滑离传送带后,经过弯道,沿半径R=0.4m的光滑圆轨道做圆周运动,刚好能通过最高点E,已知B、D两点的竖直高度差为h=0.5m(g取10m/s2)。 (1)、金属块经过D点时的速度;(2)、金属块在BCD弯道上克服摩擦力做的功。18. 如图所示,高h=1.6m、倾角为θ=30°斜面固定在水平面上。一质量为m=1kg、长度L=2m薄木板B置于斜面顶端,恰能保持静止,木板下端连有一原长为0.2m的轻弹簧。有一质量M=3kg的小物块A,从斜面左侧离水平面的高度H=1.8m某位置水平抛出,沿平行于斜面方向落到木板上并向下滑行,同时木板沿斜面下滑,木板滑到斜面底端碰到挡板时立刻停下,运动过程中物块A最终恰好能脱离弹簧。已知A、B间的动摩擦因数为 , 最大静摩擦力等于滑动摩擦力,g取10m/s2 , 不计空气阻力。求:
(1)、金属块经过D点时的速度;(2)、金属块在BCD弯道上克服摩擦力做的功。18. 如图所示,高h=1.6m、倾角为θ=30°斜面固定在水平面上。一质量为m=1kg、长度L=2m薄木板B置于斜面顶端,恰能保持静止,木板下端连有一原长为0.2m的轻弹簧。有一质量M=3kg的小物块A,从斜面左侧离水平面的高度H=1.8m某位置水平抛出,沿平行于斜面方向落到木板上并向下滑行,同时木板沿斜面下滑,木板滑到斜面底端碰到挡板时立刻停下,运动过程中物块A最终恰好能脱离弹簧。已知A、B间的动摩擦因数为 , 最大静摩擦力等于滑动摩擦力,g取10m/s2 , 不计空气阻力。求: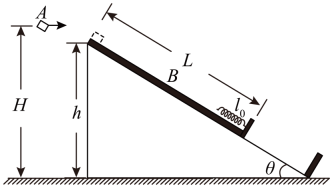 (1)、小物块A刚滑上木板B时速度的大小;(2)、斜面与木板B间的动摩擦因数μ0及木板B到达斜面底端时小物块A相对木板B的位移;(3)、弹簧被压缩到最短时的弹性势能。
(1)、小物块A刚滑上木板B时速度的大小;(2)、斜面与木板B间的动摩擦因数μ0及木板B到达斜面底端时小物块A相对木板B的位移;(3)、弹簧被压缩到最短时的弹性势能。