河北省省级联测2022届高三上学期物理第三次联考试卷
试卷更新日期:2021-11-01 类型:月考试卷
一、单选题
-
1. 法拉第笼是一个由金属编织成的笼子,笼体与大地连通。如图为某次演示中体验者进入笼子后,关闭笼门,操作员通过放电杆将78763V高压直流电靠近笼子,当放电杆尖端距笼体很近时,出现放电火花。放电杆靠近但未放电前关于法拉第笼下列说法正确的是( )
 A、笼子外表面电荷均匀分布 B、笼子外表面靠近放电杆位置电势高,距离较远处电势低 C、感应电荷在笼子内部形成的场强处处相等 D、笼子内部任意两点间电势差为零2. 为了降低潜艇噪音,提高其前进速度,可用电磁推进器替代螺旋桨。电磁推进器用绝缘材料制成直海水导管,马蹄形超导线圈在通道内形成磁场,正、负电极与直流电源相连在海水中形成电流。装置的截面图如图所示,关于该电磁推进器说法正确的是( )
A、笼子外表面电荷均匀分布 B、笼子外表面靠近放电杆位置电势高,距离较远处电势低 C、感应电荷在笼子内部形成的场强处处相等 D、笼子内部任意两点间电势差为零2. 为了降低潜艇噪音,提高其前进速度,可用电磁推进器替代螺旋桨。电磁推进器用绝缘材料制成直海水导管,马蹄形超导线圈在通道内形成磁场,正、负电极与直流电源相连在海水中形成电流。装置的截面图如图所示,关于该电磁推进器说法正确的是( ) A、同等情况下装置在纯净的淡水湖中推进效果比在海水中好 B、同等情况下增加磁感应强度不能改变推进效果 C、图示中海水受到的磁场力方向垂直纸面向里 D、图示中推进器受到海水推力方向垂直纸面向里3. 2021年5月28日,在中科院合肥等离子体所,东方超环( )再创世界纪录:实现了可重复1.6亿摄氏度20秒等离子体运行,向可控核聚变又靠近了一步。如图所示, 装置的主体是一组超导磁体,其中有环形螺线管负责产生水平环形纵向磁场 ,还有水平绕向的线圈负责提供竖直方向的极向磁场 (图中未画出),高温等离子体氘核和电子被约束在环形磁场真空室里。下列说法正确的是( )
A、同等情况下装置在纯净的淡水湖中推进效果比在海水中好 B、同等情况下增加磁感应强度不能改变推进效果 C、图示中海水受到的磁场力方向垂直纸面向里 D、图示中推进器受到海水推力方向垂直纸面向里3. 2021年5月28日,在中科院合肥等离子体所,东方超环( )再创世界纪录:实现了可重复1.6亿摄氏度20秒等离子体运行,向可控核聚变又靠近了一步。如图所示, 装置的主体是一组超导磁体,其中有环形螺线管负责产生水平环形纵向磁场 ,还有水平绕向的线圈负责提供竖直方向的极向磁场 (图中未画出),高温等离子体氘核和电子被约束在环形磁场真空室里。下列说法正确的是( ) A、聚变反应的产物中有中子,因为磁场特别强它们也将被约束在真空室里 B、如果等离子体中电子和氘核的动能近似相等,它们的活动范围也近似相等 C、如果氘核恰好沿环在真空室内做圆周运动,负责产生向心力的磁场是 D、纵向磁场 越大等离子体的活动空间越小4. 2020东京奥运会赛场,我国运动员朱雪莹、刘灵玲包揽蹦床女子冠亚军,分析朱雪莹比赛录像得到某次动作过程的时间分配是从最高点落下到触网用时0.750s,接着用时0.300s离网,又用时1.500s再触网。若运动员在离网和触网时均处于直体正立状态,运动员体重 ,身高1.65m,忽略空气阻力,重力加速度取 。下列说法正确的是( )
A、聚变反应的产物中有中子,因为磁场特别强它们也将被约束在真空室里 B、如果等离子体中电子和氘核的动能近似相等,它们的活动范围也近似相等 C、如果氘核恰好沿环在真空室内做圆周运动,负责产生向心力的磁场是 D、纵向磁场 越大等离子体的活动空间越小4. 2020东京奥运会赛场,我国运动员朱雪莹、刘灵玲包揽蹦床女子冠亚军,分析朱雪莹比赛录像得到某次动作过程的时间分配是从最高点落下到触网用时0.750s,接着用时0.300s离网,又用时1.500s再触网。若运动员在离网和触网时均处于直体正立状态,运动员体重 ,身高1.65m,忽略空气阻力,重力加速度取 。下列说法正确的是( ) A、运动员一次上行过程中,网对运动员的冲量大小为 B、运动员一次下行过程中,网对运动员的冲量大小为 C、运动员在接触网的时间里受到的平均弹力大小为3000N D、运动员在接触网的时间里网对运动员做功为225J5. 如图所示,光滑绝缘半球形的碗固定在水平地面上,可视为质点的带电小球1、2的电荷量分别为 、 ,质量分别为 、 。如果使小球1固定在碗底A点;小球2可以自由运动,平衡时小球2位于碗内的B位置处;如果使小球2固定在碗底A点,小球1可以自由运动,平衡时小球1位于碗内的C位置处。已知 弦长是 弦长的两倍,则一定有( )
A、运动员一次上行过程中,网对运动员的冲量大小为 B、运动员一次下行过程中,网对运动员的冲量大小为 C、运动员在接触网的时间里受到的平均弹力大小为3000N D、运动员在接触网的时间里网对运动员做功为225J5. 如图所示,光滑绝缘半球形的碗固定在水平地面上,可视为质点的带电小球1、2的电荷量分别为 、 ,质量分别为 、 。如果使小球1固定在碗底A点;小球2可以自由运动,平衡时小球2位于碗内的B位置处;如果使小球2固定在碗底A点,小球1可以自由运动,平衡时小球1位于碗内的C位置处。已知 弦长是 弦长的两倍,则一定有( ) A、 B、 C、 D、6. 某研究性学习小组做“用传感器观察电容器的充电和放电”的实验。把一个电容器、电流传感器、电压表、电阻、电源、单刀双掷开关按图甲所示连接。先将开关S拨至1端,电源向电容器充电,然后将开关S拨至2端,电容器放电,与电流传感器相连接的计算机记录这一过程中电流随时间变化的 图线,如图乙所示。已知电源电动势为E,内阻为r,充电电流为图乙中1线,放电电流为图乙中2线。则关于电压表示数变化说法正确的是( )
A、 B、 C、 D、6. 某研究性学习小组做“用传感器观察电容器的充电和放电”的实验。把一个电容器、电流传感器、电压表、电阻、电源、单刀双掷开关按图甲所示连接。先将开关S拨至1端,电源向电容器充电,然后将开关S拨至2端,电容器放电,与电流传感器相连接的计算机记录这一过程中电流随时间变化的 图线,如图乙所示。已知电源电动势为E,内阻为r,充电电流为图乙中1线,放电电流为图乙中2线。则关于电压表示数变化说法正确的是( ) A、充电、放电过程中电压表示数始终保持不变 B、充电过程中电压表示数持续减小 C、放电过程中电压表示数持续增大 D、充电过程中电压表示数持续增大7. 正碰的恢复系数是碰撞前后两物体沿连线方向上的分离速度与接近速度之比。甲、乙发生正碰,碰撞前甲速度为 ,乙速度为 ,碰撞后甲、乙两物体的分离速度分别为 和 ,恢复系数可表示为 。如果甲、乙两个小球在光滑水平桌面上沿同一直线运动,碰撞前、后甲的速度和碰撞前乙的速度随时间的变化关系如图所示。已知甲的质量为 ,乙的质量为 ,则该碰撞过程的恢复系数e等于( )
A、充电、放电过程中电压表示数始终保持不变 B、充电过程中电压表示数持续减小 C、放电过程中电压表示数持续增大 D、充电过程中电压表示数持续增大7. 正碰的恢复系数是碰撞前后两物体沿连线方向上的分离速度与接近速度之比。甲、乙发生正碰,碰撞前甲速度为 ,乙速度为 ,碰撞后甲、乙两物体的分离速度分别为 和 ,恢复系数可表示为 。如果甲、乙两个小球在光滑水平桌面上沿同一直线运动,碰撞前、后甲的速度和碰撞前乙的速度随时间的变化关系如图所示。已知甲的质量为 ,乙的质量为 ,则该碰撞过程的恢复系数e等于( ) A、 B、 C、 D、8. 2021年9月6日,中国能建哈密光热 熔盐塔式光热发电项目成功实现全容量并网,该电站年发电量1.98亿千瓦时,共安装了14500面五边形定日镜,定日镜在伺服系统的控制下能自动地把接收到的太阳光反射到集热塔的热靶上。伺服系统是两套结构相同的装置,一套控制水平轴负责俯仰(点头)、一套控制竖直轴负责方位(摇头),伺服系统主要耗电设备是电动机,虽然驱动的角速度很小,但是要对抗风吹,所以要带阻尼运行。设每个电动机功率为30W,内阻为3Ω,工作电压为15V。根据以上数据判断下列哪个选项最接近真实状况( )
A、 B、 C、 D、8. 2021年9月6日,中国能建哈密光热 熔盐塔式光热发电项目成功实现全容量并网,该电站年发电量1.98亿千瓦时,共安装了14500面五边形定日镜,定日镜在伺服系统的控制下能自动地把接收到的太阳光反射到集热塔的热靶上。伺服系统是两套结构相同的装置,一套控制水平轴负责俯仰(点头)、一套控制竖直轴负责方位(摇头),伺服系统主要耗电设备是电动机,虽然驱动的角速度很小,但是要对抗风吹,所以要带阻尼运行。设每个电动机功率为30W,内阻为3Ω,工作电压为15V。根据以上数据判断下列哪个选项最接近真实状况( ) A、单个伺服电动机的工作电流是5A B、单个伺服电动机克服阻尼的功率是18W C、电厂伺服系统每日耗电约 D、单个定日镜日均发电
A、单个伺服电动机的工作电流是5A B、单个伺服电动机克服阻尼的功率是18W C、电厂伺服系统每日耗电约 D、单个定日镜日均发电二、多选题
-
9. 现有一个家用太阳能辅助电路设计如图所示,图中的电源为太阳能电源,其内阻不可忽略,L1、L2、L3为位于三个房间的规格相同的灯泡,R是光敏电阻,R1、R2是保护电阻,合上开关S,则( )
 A、当照射在R上的光变强时,L1变亮,L2和L3都变暗 B、当照射在R上的光变强时,L1变暗,L2和L3都变亮 C、在光照强度不变的情况下,去掉R1改成导线,则L1会变暗 D、在光照强度不变的情况下,R2断路,则L1会变亮10. 如图甲所示为电流天平,此装置可以测定螺线管中的磁感应强度。它的横臂(图乙)能绕转轴 自由转动,轴的两侧臂长度相等。在轴的右侧,沿着横臂的边缘固定着一条U形绝缘导线,天平最右端导线 的长度为l。先调整天平处于平衡,把U形导线端放入待测的磁场中(如图丙所示),给U形导线和螺线管分别通以大小为I和 。的电流。 段导线由于受到安培力作用而使天平右臂向下倾斜,在天平的另一端可以加适当的砝码,使天平恢复平衡。设当地重力加速度 。则下列说法正确的是( )
A、当照射在R上的光变强时,L1变亮,L2和L3都变暗 B、当照射在R上的光变强时,L1变暗,L2和L3都变亮 C、在光照强度不变的情况下,去掉R1改成导线,则L1会变暗 D、在光照强度不变的情况下,R2断路,则L1会变亮10. 如图甲所示为电流天平,此装置可以测定螺线管中的磁感应强度。它的横臂(图乙)能绕转轴 自由转动,轴的两侧臂长度相等。在轴的右侧,沿着横臂的边缘固定着一条U形绝缘导线,天平最右端导线 的长度为l。先调整天平处于平衡,把U形导线端放入待测的磁场中(如图丙所示),给U形导线和螺线管分别通以大小为I和 。的电流。 段导线由于受到安培力作用而使天平右臂向下倾斜,在天平的另一端可以加适当的砝码,使天平恢复平衡。设当地重力加速度 。则下列说法正确的是( ) A、若在电流天平的左端增加的砝码质量为m,则长螺线管内部的磁感应强度B为 B、若螺线管内部的磁感应强度 ,则在螺线管内部与螺线管轴线平行的一条通电导线所受安培力为0 C、若螺线管内部的磁感应强度 , 段导线的长度为 ,U形导线通电电流 ,为使天平保持平衡,应在左端悬挂 的砝码 D、假如使通过 段导线的电流反向,仍可以通过悬挂砝码的方式测量磁感应强度11. 如图所示,一条直线上的A、B两点固定两个点电荷+Q和+q( ),一个带电荷量为 的粒子C,以一定的初速度 从靠近A点的位置沿 直线向B运动,则在粒子C运动的过程中,粒子C的电势( )、电势能( )、速度的平方( )、电场强度(E),这四个量与距A点的距离(x)的关系图像可能正确的是( )
A、若在电流天平的左端增加的砝码质量为m,则长螺线管内部的磁感应强度B为 B、若螺线管内部的磁感应强度 ,则在螺线管内部与螺线管轴线平行的一条通电导线所受安培力为0 C、若螺线管内部的磁感应强度 , 段导线的长度为 ,U形导线通电电流 ,为使天平保持平衡,应在左端悬挂 的砝码 D、假如使通过 段导线的电流反向,仍可以通过悬挂砝码的方式测量磁感应强度11. 如图所示,一条直线上的A、B两点固定两个点电荷+Q和+q( ),一个带电荷量为 的粒子C,以一定的初速度 从靠近A点的位置沿 直线向B运动,则在粒子C运动的过程中,粒子C的电势( )、电势能( )、速度的平方( )、电场强度(E),这四个量与距A点的距离(x)的关系图像可能正确的是( ) A、
A、 B、
B、 C、
C、 D、
D、
三、实验题
-
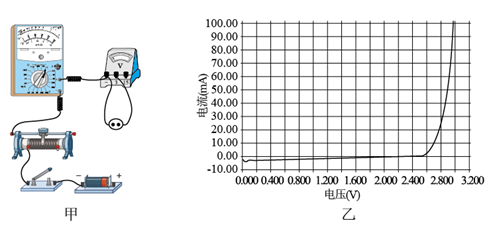
12. 灯具的高节能、长寿命、利环保的优越性能获得普遍的公认。某实验小组探究 灯的伏安特性曲线,实验需要灯两端的电压从零开始调节。如图甲所示,该小组已连接好部分导线,请在答题卡的图中完成电路剩余部分的连接。如图乙为该实验小组通过数据采集及处理系统等得到的 灯的伏安特性曲线,当 灯两端电压为2.800V时,灯的功率为W。(结果保留2位有效数字)
 13. 某同学从电子市场买了一个手机电池,该同学通过实验测量该电池的电动势和内阻,除了开关和若干导线以外,还有如下器材可供选择:
13. 某同学从电子市场买了一个手机电池,该同学通过实验测量该电池的电动势和内阻,除了开关和若干导线以外,还有如下器材可供选择:A.电流表A(0.6A, )
B.电压表V(5V, )
C.滑动变阻器 ( ,1A)
D.滑动变阻器 ( , )
(1)、为了使测量结果尽可能准确,请根据现有器材在方框中设计电路图(画在答题卡上) , 其中滑动变阻器应选(填写前面的字母序号)。(2)、根据实验中记录的电压表的示数U与电流表的示数I的值,经描点、连线得到 图像,如图所示,根据图中所给数据,该电池的电动势与内电阻分别为 V, Ω。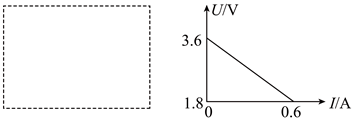
四、解答题
-
14. 如图所示,匀强电场水平向右,一带负电的微粒从O点以与水平方向成37°角的初速度 向右上方发射,已知该带电微粒受到的电场力与它的重力的比值为3∶1, , ,求:微粒运动到其轨迹的最高点时速度的大小。
 15. 如图所示,在空间建立正交坐标系 ,空间中存在范围足够大,沿正交坐标系y轴正方向的匀强磁场和匀强电场,磁感应强度大小为B。质量为m,电荷量为q( )的粒子从坐标原点O沿z轴正方向以初速度 射到该磁场及电场中,粒子第一次回到y轴上并经过 点,不计重力和粒子间的相互作用。
15. 如图所示,在空间建立正交坐标系 ,空间中存在范围足够大,沿正交坐标系y轴正方向的匀强磁场和匀强电场,磁感应强度大小为B。质量为m,电荷量为q( )的粒子从坐标原点O沿z轴正方向以初速度 射到该磁场及电场中,粒子第一次回到y轴上并经过 点,不计重力和粒子间的相互作用。 (1)、求电场强度E的大小;(2)、若在粒子通过A点时迅速改变电场,使新的匀强电场沿y轴负方向,之后粒子恰好能回到O点,回到O点时速度与y轴负方向成30°角,求新匀强电场场强 的大小。16. 某次交警勘查车祸现场,技术人员需要根据现场情况估算碰撞前的车速情况,已知该事故发生在平坦路段,人车碰撞后瞬间车开始完全制动,事故发生的示意图如图所示,车辆质量为M,行人质量为m,车辆与地面间的动摩擦因数为 ,重力加速度为g,忽略碰撞前人的速度,不考虑空气阻力的影响。现有两种碰撞车速v的估算模型,其一为基于车辆制动距离 的碰撞车速估算( 为碰撞结束后车辆滑行的距离),该模型特点:碰撞时间极短,碰后车、人快速达到共同速度;其二为基于行人抛距 的碰撞车速估算,该模型特点:碰撞时间极短,行人被撞飞的速度等于碰后瞬间车辆速度,行人被水平撞飞,行人与地面撞击后,没有反弹而是在地面滑行,人与地面间的动摩擦因数为 ,R为行人从碰撞结束时刻的位置至第一落地点之间沿道路的距离;h为行人被撞飞时的重心高度;S为行人落地后滑行的距离; 为行人抛距。求:
(1)、求电场强度E的大小;(2)、若在粒子通过A点时迅速改变电场,使新的匀强电场沿y轴负方向,之后粒子恰好能回到O点,回到O点时速度与y轴负方向成30°角,求新匀强电场场强 的大小。16. 某次交警勘查车祸现场,技术人员需要根据现场情况估算碰撞前的车速情况,已知该事故发生在平坦路段,人车碰撞后瞬间车开始完全制动,事故发生的示意图如图所示,车辆质量为M,行人质量为m,车辆与地面间的动摩擦因数为 ,重力加速度为g,忽略碰撞前人的速度,不考虑空气阻力的影响。现有两种碰撞车速v的估算模型,其一为基于车辆制动距离 的碰撞车速估算( 为碰撞结束后车辆滑行的距离),该模型特点:碰撞时间极短,碰后车、人快速达到共同速度;其二为基于行人抛距 的碰撞车速估算,该模型特点:碰撞时间极短,行人被撞飞的速度等于碰后瞬间车辆速度,行人被水平撞飞,行人与地面撞击后,没有反弹而是在地面滑行,人与地面间的动摩擦因数为 ,R为行人从碰撞结束时刻的位置至第一落地点之间沿道路的距离;h为行人被撞飞时的重心高度;S为行人落地后滑行的距离; 为行人抛距。求: (1)、基于车辆制动距离 ,求碰撞车速v的大小;(2)、基于行人抛距 ,求碰撞车速v的大小;(3)、若该过程车盖凹陷x,不考虑人的损伤和人、车间的摩擦,基于车辆制动距离 ,估算该过程车与人的平均作用力。
(1)、基于车辆制动距离 ,求碰撞车速v的大小;(2)、基于行人抛距 ,求碰撞车速v的大小;(3)、若该过程车盖凹陷x,不考虑人的损伤和人、车间的摩擦,基于车辆制动距离 ,估算该过程车与人的平均作用力。