浙江省丽水、湖州、衢州三地市2021届高三下学期通用技术4月教学质量检测(二模)试卷
试卷更新日期:2021-04-25 类型:高考模拟
一、选择题(本大题共13小题,每小题2分,共26分。)
-
1. 如图所示是一款万向吸盘式台虎钳。下列尺寸中对人机关系没有直接影响的是( )
 A、钳口最大间距
A、钳口最大间距 B、万向调节柄长度
B、万向调节柄长度  C、吸盘拨杆长宽
C、吸盘拨杆长宽  D、丝杆手柄长度
D、丝杆手柄长度  2. 如图所示是一款家用智能健身单车。下列相关评价中不恰当的是( )
2. 如图所示是一款家用智能健身单车。下列相关评价中不恰当的是( ) A、多挡阻力调节,体现了设计的实用原则 B、加粗车架,提高了结构的强度 C、内置智能交互模块,体现了设计的创新原则 D、采用铝材制作脚踏板,体现了设计的技术规范原则3. 如图a所示的榫卯结构,其中构件1的结构如图b所示。下列构件2的设计方案中正确的是( )
A、多挡阻力调节,体现了设计的实用原则 B、加粗车架,提高了结构的强度 C、内置智能交互模块,体现了设计的创新原则 D、采用铝材制作脚踏板,体现了设计的技术规范原则3. 如图a所示的榫卯结构,其中构件1的结构如图b所示。下列构件2的设计方案中正确的是( ) A、
A、 B、
B、 C、
C、 D、
D、 4. 小明设计了如图所示的零件,请根据题图完成下列小题。
4. 小明设计了如图所示的零件,请根据题图完成下列小题。 (1)、图中漏标的尺寸共有( )A、2处 B、3处 C、4处 D、5处(2)、小明在通用技术实践室用2mm厚的钢板加工该零件,下列说法合理的是( )A、加工流程为:划线→锯割→锉削→钻孔→弯折 B、锉刀上的铁屑用钢丝刷清除 C、需要用到的工具:钢直尺、样冲、划规、钢锯、圆锉、麻花钻等 D、在台虎钳上夹紧钢板并调整位置,戴上防护眼镜,进行钻孔5. 如图所示为布卷吊机结构示意图。电机带动绳索吊起布卷,锁位钩钩住夹持臂连接点,以防布卷被夹持过紧而变形。布卷被吊起时,连杆、锁位钩、夹持臂的主要受力形式是( )
(1)、图中漏标的尺寸共有( )A、2处 B、3处 C、4处 D、5处(2)、小明在通用技术实践室用2mm厚的钢板加工该零件,下列说法合理的是( )A、加工流程为:划线→锯割→锉削→钻孔→弯折 B、锉刀上的铁屑用钢丝刷清除 C、需要用到的工具:钢直尺、样冲、划规、钢锯、圆锉、麻花钻等 D、在台虎钳上夹紧钢板并调整位置,戴上防护眼镜,进行钻孔5. 如图所示为布卷吊机结构示意图。电机带动绳索吊起布卷,锁位钩钩住夹持臂连接点,以防布卷被夹持过紧而变形。布卷被吊起时,连杆、锁位钩、夹持臂的主要受力形式是( ) A、连杆受压、锁位钩受压和受弯曲、夹持臂受压 B、连杆受压、锁位钩受拉和受弯曲、夹持臂受压 C、连杆受拉、锁位钩受拉和受弯曲、夹持臂受弯曲 D、连杆受拉、锁位钩受压和受弯曲、夹持臂受弯曲6. 如图所示为某规模化养殖场粪水处理工艺流程图。下列关于该流程的分析中不正确的是( )
A、连杆受压、锁位钩受压和受弯曲、夹持臂受压 B、连杆受压、锁位钩受拉和受弯曲、夹持臂受压 C、连杆受拉、锁位钩受拉和受弯曲、夹持臂受弯曲 D、连杆受拉、锁位钩受压和受弯曲、夹持臂受弯曲6. 如图所示为某规模化养殖场粪水处理工艺流程图。下列关于该流程的分析中不正确的是( )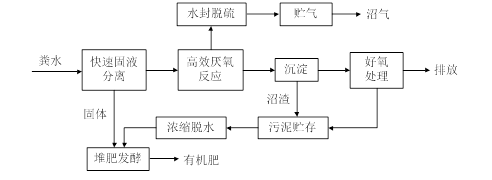 A、水封脱硫与沉淀是并行环节 B、高效厌氧反应与浓缩脱水是串行环节 C、该工艺流程产物中有沼气、有机肥 D、有机肥必须经过浓缩脱水7. 如图所示为某番茄采摘智能机器人系统。其控制部分可分为番茄采摘控制子系统和行进驱动子系统。番茄采摘控制子系统工作过程是:工控机根据摄像机获得的数据,判定番茄是否成熟并确定其位置,然后控制机械臂和末端采摘装置,实现对成熟番茄的采摘。请根据示意图及描述完成下列小题。
A、水封脱硫与沉淀是并行环节 B、高效厌氧反应与浓缩脱水是串行环节 C、该工艺流程产物中有沼气、有机肥 D、有机肥必须经过浓缩脱水7. 如图所示为某番茄采摘智能机器人系统。其控制部分可分为番茄采摘控制子系统和行进驱动子系统。番茄采摘控制子系统工作过程是:工控机根据摄像机获得的数据,判定番茄是否成熟并确定其位置,然后控制机械臂和末端采摘装置,实现对成熟番茄的采摘。请根据示意图及描述完成下列小题。 (1)、下列关于番茄采摘智能机器人系统的分析中不正确的是( )A、行进驱动子系统影响采摘控制子系统的工作,体现了系统的相关性 B、果实筐长期使用会变形,需要更换,体现了系统的动态性 C、提高对成熟番茄的识别率是该系统优化的目标 D、工控机显示器的分辨率是该系统优化的约束条件(2)、下列关于番茄采摘控制子系统的分析中正确的是( )A、摄像机获得的数据是输入量 B、工控显示器是被控对象 C、车轮是执行器 D、机械臂伸出的距离是输出量8. 下列关于电子元器件的描述中正确的是( )A、芯片的引脚编号正确两个元件都有正负极,可作开关使用
(1)、下列关于番茄采摘智能机器人系统的分析中不正确的是( )A、行进驱动子系统影响采摘控制子系统的工作,体现了系统的相关性 B、果实筐长期使用会变形,需要更换,体现了系统的动态性 C、提高对成熟番茄的识别率是该系统优化的目标 D、工控机显示器的分辨率是该系统优化的约束条件(2)、下列关于番茄采摘控制子系统的分析中正确的是( )A、摄像机获得的数据是输入量 B、工控显示器是被控对象 C、车轮是执行器 D、机械臂伸出的距离是输出量8. 下列关于电子元器件的描述中正确的是( )A、芯片的引脚编号正确两个元件都有正负极,可作开关使用 B、图示元件为光敏电阻,光线越强,阻值越小
B、图示元件为光敏电阻,光线越强,阻值越小  C、图示元件为正温度系数热敏电阻
C、图示元件为正温度系数热敏电阻  D、两个元件都有正负极,可作开关使用
D、两个元件都有正负极,可作开关使用  9. 如图所示是小明搭建的三极管(硅管)实验电路,电压表读数都是3V。下列关于电路的分析中正确的是( )
9. 如图所示是小明搭建的三极管(硅管)实验电路,电压表读数都是3V。下列关于电路的分析中正确的是( ) A、图a中Rp的滑片往上滑动时,V的读数逐渐减小 B、图a中逐渐增大R1,V1的集电极电流逐渐减小 C、图b中逐渐减小R1,V1将进入饱和状态 D、图b中Rp的滑片往下滑动时,V的读数逐渐减小10. 如图所示是小明设计的报警电路,只有在光线强且温度高时蜂鸣器才不报警。Rt是负温度系数的热敏电阻,Rg是光敏电阻。虚线框内的电路设计正确的是( )
A、图a中Rp的滑片往上滑动时,V的读数逐渐减小 B、图a中逐渐增大R1,V1的集电极电流逐渐减小 C、图b中逐渐减小R1,V1将进入饱和状态 D、图b中Rp的滑片往下滑动时,V的读数逐渐减小10. 如图所示是小明设计的报警电路,只有在光线强且温度高时蜂鸣器才不报警。Rt是负温度系数的热敏电阻,Rg是光敏电阻。虚线框内的电路设计正确的是( )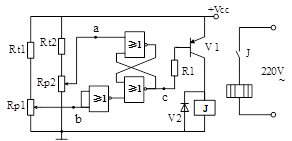 A、
A、 B、
B、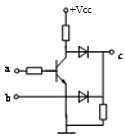 C、
C、 D、
D、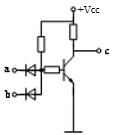 11. 如图所示为小明设计的孵化箱温控电路,可将温度保持在37℃~39℃之间。下列关于该电路的分析中正确的是( )
11. 如图所示为小明设计的孵化箱温控电路,可将温度保持在37℃~39℃之间。下列关于该电路的分析中正确的是( )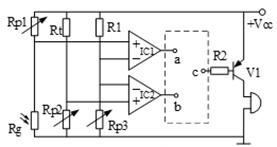 A、Rt1、Rt2均为正温度系数热敏电阻 B、调整Rp1设定下限温度值,调整Rp2设定上限温度值 C、温度在37℃~39℃时,a、b、c均为低电平 D、把3个或非门改成与非门,电路功能不变
A、Rt1、Rt2均为正温度系数热敏电阻 B、调整Rp1设定下限温度值,调整Rp2设定上限温度值 C、温度在37℃~39℃时,a、b、c均为低电平 D、把3个或非门改成与非门,电路功能不变二、非选择题(共4题,6+9+3+6,满分24分)
-
12. 图a为某简易机器人行走控制系统的示意图,由步行机械装置、驱动板、控制器、传感器等组成。电机的动力经过齿轮箱变速后,由动力轴驱动左右行走臂交替摆动模拟人的步行前进,当传感器检测到前方有障碍物时会停止行走。请根据示意图和描述,完成以下任务。
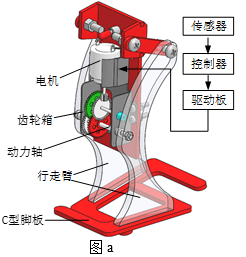 (1)、该系统的控制方式属于(在“A .开环控制;B .闭环控制”中选择合适的选项,将序号填入横线处);当前方出现障碍物时,机器人停止行走,出现障碍物(在“A .不是干扰因素;B .是干扰因素”中选择合适的选项,将序号填入横线处);(2)、图a中动力轴的设计,以下方案中最合理的是 (在下列选项中选择合适的选项,将序号填入横线处);A、
(1)、该系统的控制方式属于(在“A .开环控制;B .闭环控制”中选择合适的选项,将序号填入横线处);当前方出现障碍物时,机器人停止行走,出现障碍物(在“A .不是干扰因素;B .是干扰因素”中选择合适的选项,将序号填入横线处);(2)、图a中动力轴的设计,以下方案中最合理的是 (在下列选项中选择合适的选项,将序号填入横线处);A、 B、
B、 C、
C、 (3)、设计系统时需要对电机、驱动板以及传感器等部件的参数进行计算、设置和反复调试,体现了系统分析的(在“A .整体性原则;B .综合性原则;C .科学性原则”中选择合适的选项,将序号填入横线处);(4)、图b中标注的“螺丝”要和相应的螺母配合才能可靠安装行走臂,下列选项中合理的是 (选择合适的选项,将序号填入横线处)。
(3)、设计系统时需要对电机、驱动板以及传感器等部件的参数进行计算、设置和反复调试,体现了系统分析的(在“A .整体性原则;B .综合性原则;C .科学性原则”中选择合适的选项,将序号填入横线处);(4)、图b中标注的“螺丝”要和相应的螺母配合才能可靠安装行走臂,下列选项中合理的是 (选择合适的选项,将序号填入横线处)。 A、
A、 B、
B、 C、
C、 D、
D、 13. 小明准备在工作室靠近门框的墙上(位置如图a所示)安装推杆电机,利用按钮开关控制电机推杆的伸缩实现活动插销的左右移动(如图b所示),电机的推杆伸缩范围为40mm(推杆完全伸出或者完全缩进时会自动停止运动),插销的水平活动范围是40mm。由于位置和尺寸限制,推杆电机只能竖直安装,电机推杆和活动插销尾端的安装孔径均为5mm。请你帮助小明完成传动部分的设计,要求如下:
13. 小明准备在工作室靠近门框的墙上(位置如图a所示)安装推杆电机,利用按钮开关控制电机推杆的伸缩实现活动插销的左右移动(如图b所示),电机的推杆伸缩范围为40mm(推杆完全伸出或者完全缩进时会自动停止运动),插销的水平活动范围是40mm。由于位置和尺寸限制,推杆电机只能竖直安装,电机推杆和活动插销尾端的安装孔径均为5mm。请你帮助小明完成传动部分的设计,要求如下: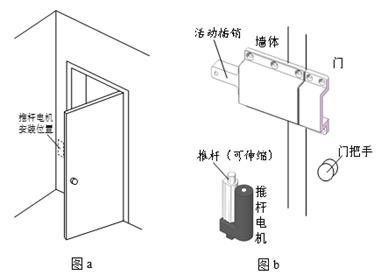
A.电机推杆上下伸缩时能够带动活动插销左右滑动;
B.必要时可以在安装推杆电机的墙面上安装其他零部件;
C.材料自选。
根据描述和设计要求,完成以下任务:
(1)、①画出设计草图,必要时可以用文字说明;②在设计草图上标注主要尺寸;
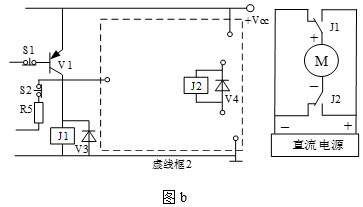
(2)、小明准备在装置的机械部分和电路部分制作完成并安装后进行下列试验,其中不合理的是 (在下列选项中选择合适的选项,将序号填入横线处);A、分别按下开门和关门的按钮,观察活动插销能否左右滑动 B、增加负载,测试推杆电机产生的推力大小 C、测试推杆伸出至40mm时,能否顺利开门 D、在装置上施加一定的力,观察装置安装是否牢固(3)、在安装调试时,小明发现传动装置的摩擦阻力过大而使得活动插销滑动不顺畅,小明发现问题的途径是(在“A .观察日常生活;B .收集和分析信息;C .技术研究和技术试验”中选择合适的选项,将序号填入横线处);(4)、要解决插销滑动不顺畅的问题,以下措施中最为可行的是 (在下列选项中选择合适的选项,将序号填入横线处)。A、在所有铰连接的转轴上安装轴承 B、在所有相对转动和相对滑动的部位加适量润滑油 C、调大活动插销和支架之间的间隙14. 请补全三视图中所缺的3条图线。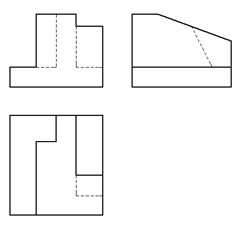 15. 如图a所示是小明设计的自动开、关窗电路。其中Rs为湿敏电阻,下雨或光线暗时电机M正转(电流从“+”到“-”),窗户关闭;无雨且光线亮时,电机M反转(电流从“-”到“+”),窗户打开。S1、S2为常闭开关,窗户完全关闭时S1断开、完全开启时S2断开;IC1为电压比较器,V+>V-时输出高电平,V+<V-时输出低电平。555芯片5脚的电位用Vct表示。请完成以下任务:
15. 如图a所示是小明设计的自动开、关窗电路。其中Rs为湿敏电阻,下雨或光线暗时电机M正转(电流从“+”到“-”),窗户关闭;无雨且光线亮时,电机M反转(电流从“-”到“+”),窗户打开。S1、S2为常闭开关,窗户完全关闭时S1断开、完全开启时S2断开;IC1为电压比较器,V+>V-时输出高电平,V+<V-时输出低电平。555芯片5脚的电位用Vct表示。请完成以下任务:555功能表
2脚
6脚
4脚
3脚
>1/2Vct
>Vct
高电平
低电平
>1/2Vct
<Vct
高电平
保持
<1/2Vct
任意
高电平
高电平
任意
任意
低电平
低电平
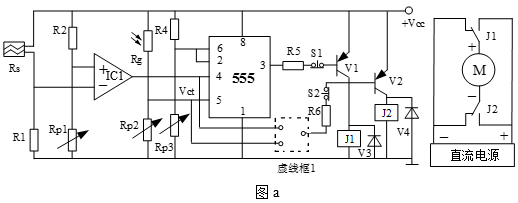 (1)、下雨时比较器输出(在“A .高电平;B .低电平”中选择合适的选项,将序号填入横线处);(2)、适当调大Rp1阻值,下雨时的湿度设定值将会(在“A .变大;B .不变;C .变小”中选择合适的选项,将序号填入横线处);适当调大Rp3阻值,光照度的设定值将会(在“A .变大;B .不变;C .变小”中选择合适的选项,将序号填入横线处);(3)、请选用一个合适的逻辑门,补全虚线框1中电路;(4)、小明发现电机M无法正常工作,经检测,是三极管V2损坏,现准备用2个NPN型三级管和1个电阻来替代原来的三极管。请帮他完成图b虚线框2中的电路(三极管采用共发射极接法)。
(1)、下雨时比较器输出(在“A .高电平;B .低电平”中选择合适的选项,将序号填入横线处);(2)、适当调大Rp1阻值,下雨时的湿度设定值将会(在“A .变大;B .不变;C .变小”中选择合适的选项,将序号填入横线处);适当调大Rp3阻值,光照度的设定值将会(在“A .变大;B .不变;C .变小”中选择合适的选项,将序号填入横线处);(3)、请选用一个合适的逻辑门,补全虚线框1中电路;(4)、小明发现电机M无法正常工作,经检测,是三极管V2损坏,现准备用2个NPN型三级管和1个电阻来替代原来的三极管。请帮他完成图b虚线框2中的电路(三极管采用共发射极接法)。