2012年福建省福州市中考数学试卷
试卷更新日期:2017-05-10 类型:中考真卷
一、选择题
-
1. 3的相反数是( )A、﹣3 B、 C、3 D、﹣2. 今年参观“5.18”海交会的总人数约为489000人,将489000用科学记数法表示为( )A、48.9×104 B、4.89×105 C、4.89×104 D、0.489×1063. 如图是由4个大小相同的正方形组合而成的几何体,其主视图是( )
 A、
A、 B、
B、 C、
C、 D、
D、 4. 如图,直线a∥b,∠1=70°,那么∠2的度数是( )
4. 如图,直线a∥b,∠1=70°,那么∠2的度数是( ) A、50° B、60° C、70° D、80°5. 下列计算正确的是( )A、a+a=2a B、b3•b3=2b3 C、a3÷a=a3 D、(a5)2=a76. 式子 在实数范围内有意义,则x的取值范围是( )A、x<1 B、x≤1 C、x>1 D、x≥17. 某射击运动员在一次射击练习中,成绩(单位:环)记录如下:8,9,8,7,10.这组数据的平均数和中位数分别是( )A、8,8 B、8.4,8 C、8.4,8.4 D、8,8.48. ⊙O1和⊙O2的半径分别是3cm和4cm,如果O1O2=7cm,则这两圆的位置关系是( )A、内含 B、相交 C、外切 D、外离9.
A、50° B、60° C、70° D、80°5. 下列计算正确的是( )A、a+a=2a B、b3•b3=2b3 C、a3÷a=a3 D、(a5)2=a76. 式子 在实数范围内有意义,则x的取值范围是( )A、x<1 B、x≤1 C、x>1 D、x≥17. 某射击运动员在一次射击练习中,成绩(单位:环)记录如下:8,9,8,7,10.这组数据的平均数和中位数分别是( )A、8,8 B、8.4,8 C、8.4,8.4 D、8,8.48. ⊙O1和⊙O2的半径分别是3cm和4cm,如果O1O2=7cm,则这两圆的位置关系是( )A、内含 B、相交 C、外切 D、外离9.如图,从热气球C处测得地面A、B两点的俯角分别是30°、45°,如果此时热气球C处的高度CD为100米,点A、D、B在同一直线上,则AB两点的距离是( )
 A、200米 B、200 米 C、220 米 D、100( +1)米10.
A、200米 B、200 米 C、220 米 D、100( +1)米10.如图,过点C(1,2)分别作x轴、y轴的平行线,交直线y=﹣x+6于A、B两点,若反比例函数y= (x>0)的图象与△ABC有公共点,则k的取值范围是( )
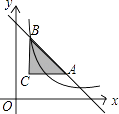 A、2≤k≤9 B、2≤k≤8 C、2≤k≤5 D、5≤k≤8
A、2≤k≤9 B、2≤k≤8 C、2≤k≤5 D、5≤k≤8二、填空题
-
11. 分解因式:x2﹣16= .12. 一个袋子中装有3个红球和2个绿球,这些球除了颜色外都相同,从袋子中随机摸出一个球,则摸到红球的概率为 .13. 若 是整数,则正整数n的最小值为 .14. 计算: = .15. 如图,已知△ABC,AB=AC=1,∠A=36°,∠ABC的平分线BD交AC于点D,则AD的长是 , cosA的值是 . (结果保留根号)

三、解答题
-
16.(1)、计算:|﹣3|+(π+1)0﹣(2)、化简:a(1﹣a)+(a+1)2﹣1.17.
 (1)、如图1,点E、F在AC上,AB∥CD,AB=CD,AE=CF,求证:△ABF≌△CDE(2)、如图2,方格纸中的每个小方格是边长为1个单位长度的正方形.
(1)、如图1,点E、F在AC上,AB∥CD,AB=CD,AE=CF,求证:△ABF≌△CDE(2)、如图2,方格纸中的每个小方格是边长为1个单位长度的正方形.①画出将Rt△ABC向右平移5个单位长度后的Rt△A1B1C1
②再将Rt△A1B1C1绕点C1顺时针旋转90°,画出旋转后的Rt△A2B2C2 , 并求出旋转过程中线段A1C1所扫过的面积(结果保留π)
18. 省教育厅决定在全省中小学开展“关注校车、关爱学生”为主题的交通安全教育宣传周活动,某中学为了了解本校学生的上学方式,在全校范围内随机抽查了部分学生,将收集的数据绘制成如图两幅不完整的统计图(如图所示),请根据图中提供的信息,解答下列问题. (1)、m=%,这次共抽取名学生进行调查;并补全条形图;(2)、在这次抽样调查中,采用哪种上学方式的人数最多?(3)、如果该校共有1500名学生,请你估计该校骑自行车上学的学生有多少名?19. 某次知识竞赛共有20道题,每一题答对得5分,答错或不答都扣3分.(1)、小明考了68分,那么小明答对了多少问题?(2)、小亮获得二等奖(70分~90分),请你算算小亮答对了几道题?20. 如图,AB为⊙O的直径,C为⊙O上一点,AD和过C点的切线互相垂直,垂足为D,AD交⊙O于点E.
(1)、m=%,这次共抽取名学生进行调查;并补全条形图;(2)、在这次抽样调查中,采用哪种上学方式的人数最多?(3)、如果该校共有1500名学生,请你估计该校骑自行车上学的学生有多少名?19. 某次知识竞赛共有20道题,每一题答对得5分,答错或不答都扣3分.(1)、小明考了68分,那么小明答对了多少问题?(2)、小亮获得二等奖(70分~90分),请你算算小亮答对了几道题?20. 如图,AB为⊙O的直径,C为⊙O上一点,AD和过C点的切线互相垂直,垂足为D,AD交⊙O于点E.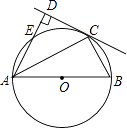 (1)、求证:AC平分∠DAB;(2)、若∠B=60°,CD=2 ,求AE的长.21. 如图1,在Rt△ABC中,∠C=90°,AC=6,BC=8,动点P从点A开始沿边AC向点C以1个单位长度的速度运动,动点Q从点C开始沿边CB向点B以每秒2个单位长度的速度运动,过点P作PD∥BC,交AB于点D,连接PQ分别从点A、C同时出发,当其中一点到达端点时,另一点也随之停止运动,设运动时间为t秒(t≥0).
(1)、求证:AC平分∠DAB;(2)、若∠B=60°,CD=2 ,求AE的长.21. 如图1,在Rt△ABC中,∠C=90°,AC=6,BC=8,动点P从点A开始沿边AC向点C以1个单位长度的速度运动,动点Q从点C开始沿边CB向点B以每秒2个单位长度的速度运动,过点P作PD∥BC,交AB于点D,连接PQ分别从点A、C同时出发,当其中一点到达端点时,另一点也随之停止运动,设运动时间为t秒(t≥0). (1)、直接用含t的代数式分别表示:QB= , PD= .(2)、是否存在t的值,使四边形PDBQ为菱形?若存在,求出t的值;若不存在,说明理由.并探究如何改变Q的速度(匀速运动),使四边形PDBQ在某一时刻为菱形,求点Q的速度;(3)、如图2,在整个运动过程中,求出线段PQ中点M所经过的路径长.22.
(1)、直接用含t的代数式分别表示:QB= , PD= .(2)、是否存在t的值,使四边形PDBQ为菱形?若存在,求出t的值;若不存在,说明理由.并探究如何改变Q的速度(匀速运动),使四边形PDBQ在某一时刻为菱形,求点Q的速度;(3)、如图2,在整个运动过程中,求出线段PQ中点M所经过的路径长.22.如图1,已知抛物线y=ax2+bx(a≠0)经过A(3,0)、B(4,4)两点.
 (1)、求抛物线的解析式;(2)、将直线OB向下平移m个单位长度后,得到的直线与抛物线只有一个公共点D,求m的值及点D的坐标;(3)、如图2,若点N在抛物线上,且∠NBO=∠ABO,则在(2)的条件下,求出所有满足△POD∽△NOB的点P坐标(点P、O、D分别与点N、O、B对应).
(1)、求抛物线的解析式;(2)、将直线OB向下平移m个单位长度后,得到的直线与抛物线只有一个公共点D,求m的值及点D的坐标;(3)、如图2,若点N在抛物线上,且∠NBO=∠ABO,则在(2)的条件下,求出所有满足△POD∽△NOB的点P坐标(点P、O、D分别与点N、O、B对应).